Triple product
In vector algebra, a branch of mathematics, the triple product is a product of three 3-dimensional vectors, usually Euclidean vectors. The name "triple product" is used for two different products, the scalar-valued scalar triple product and, less often, the vector-valued vector triple product.
Scalar triple product

The scalar triple product (also called the mixed product, box product, or triple scalar product) is defined as the dot product of one of the vectors with the cross product of the other two.
Geometric interpretation
Geometrically, the scalar triple product

is the (signed) volume of the parallelepiped defined by the three vectors given. Here, the parentheses may be omitted without causing ambiguity, since the dot product cannot be evaluated first. If it were, it would leave the cross product of a scalar and a vector, which is not defined.
Properties
- The scalar triple product is invariant under a circular shift of its three operands (a, b, c):
- Swapping the positions of the operators without re-ordering the operands leaves the triple product unchanged. This follows from the preceding property and the commutative property of the dot product.
- Swapping any two of the three operands negates the triple product. This follows from the circular-shift property and the anticommutativity of the cross product.
- The scalar triple product can also be understood as the determinant of the 3×3 matrix (thus also its inverse) having the three vectors either as its rows or its columns (a matrix has the same determinant as its transpose):
- If the scalar triple product is equal to zero, then the three vectors a, b, and c are coplanar, since the parallelepiped defined by them would be flat and have no volume.
- If any two vectors in the scalar triple product are equal, then its value is zero:
- Moreover,
- The simple product of two triple products (or the square of a triple product), may be expanded in terms of dot products:[1]






![{\displaystyle ((\mathbf {a} \times \mathbf {b} )\cdot \mathbf {c} )\;((\mathbf {d} \times \mathbf {e} )\cdot \mathbf {f} )=\det \left[{\begin{pmatrix}\mathbf {a} \\\mathbf {b} \\\mathbf {c} \end{pmatrix}}\cdot {\begin{pmatrix}\mathbf {d} &\mathbf {e} &\mathbf {f} \end{pmatrix}}\right]=\det {\begin{bmatrix}\mathbf {a} \cdot \mathbf {d} &\mathbf {a} \cdot \mathbf {e} &\mathbf {a} \cdot \mathbf {f} \\\mathbf {b} \cdot \mathbf {d} &\mathbf {b} \cdot \mathbf {e} &\mathbf {b} \cdot \mathbf {f} \\\mathbf {c} \cdot \mathbf {d} &\mathbf {c} \cdot \mathbf {e} &\mathbf {c} \cdot \mathbf {f} \end{bmatrix}}}](../I/m/0cfb06e7fe54eabe22b489dd15fa947e21414f6a.svg)
Scalar or pseudoscalar
Although the scalar triple product gives the volume of the parallelepiped, it is the signed volume, the sign depending on the orientation of the frame or the parity of the permutation of the vectors. This means the product is negated if the orientation is reversed, for example by a parity transformation, and so is more properly described as a pseudoscalar if the orientation can change.
This also relates to the handedness of the cross product; the cross product transforms as a pseudovector under parity transformations and so is properly described as a pseudovector. The dot product of two vectors is a scalar but the dot product of a pseudovector and a vector is a pseudoscalar, so the scalar triple product must be pseudoscalar-valued.
If T is a rotation operator, then

but if T is an improper rotation, then

As an exterior product
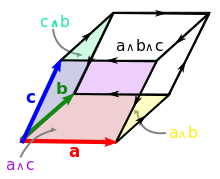
In exterior algebra and geometric algebra the exterior product of two vectors is a bivector, while the exterior product of three vectors is a trivector. A bivector is an oriented plane element and a trivector is an oriented volume element, in the same way that a vector is an oriented line element. Given vectors a, b and c, the product

is a trivector with magnitude equal to the scalar triple product, and is the Hodge dual of the vector triple product. As the exterior product is associative brackets are not needed as it does not matter which of a ∧ b or b ∧ c is calculated first, though the order of the vectors in the product does matter. Geometrically the trivector a ∧ b ∧ c corresponds to the parallelepiped spanned by a, b, and c, with bivectors a ∧ b, b ∧ c and a ∧ c matching the parallelogram faces of the parallelepiped.
As a trilinear functional
The triple product is identical to the volume form of the Euclidean 3-space applied to the vectors via interior product. It also can be expressed as a contraction of vectors with a rank-3 tensor equivalent to the form (or a pseudotensor equivalent to the volume pseudoform); see below.
Vector triple product
The vector triple product is defined as the cross product of one vector with the cross product of the other two. The following relationship holds:
- .

This is known as triple product expansion, or Lagrange's formula,[2][3] although the latter name is also used for several other formulas. Its right hand side can be remembered by using the mnemonic "BAC − CAB", provided one keeps in mind which vectors are dotted together. A proof is provided below.
Since the cross product is anticommutative, this formula may also be written (up to permutation of the letters) as:

From Lagrange's formula it follows that the vector triple product satisfies:

which is the Jacobi identity for the cross product. Another useful formula follows:

These formulas are very useful in simplifying vector calculations in physics. A related identity regarding gradients and useful in vector calculus is Lagrange's formula of vector cross-product identity:[4]

This can be also regarded as a special case of the more general Laplace–de Rham operator .

Proof
The component of is given by:



Similarly, the and components of are given by:



By combining these three components we obtain:

Using geometric algebra
If geometric algebra is used the cross product b × c of vectors is expressed as their exterior product b∧c, a bivector. The second cross product cannot be expressed as an exterior product, otherwise the scalar triple product would result. Instead a left contraction[6] can be used, so the formula becomes[7]

The proof follows from the properties of the contraction.[6] The result is the same vector as calculated using a × (b × c).
Interpretations
Tensor calculus
In tensor notation the triple product is expressed using the Levi-Civita symbol:[8]
![{\displaystyle (\mathbf {a} \cdot [\mathbf {b} \times \mathbf {c} ])=\varepsilon _{ijk}a^{i}b^{j}c^{k}}](../I/m/f3b54f169fde9e0cf5f4116aa8b181f1c996cc63.svg)
and
- ,
![{\displaystyle (\mathbf {a} \times [\mathbf {b} \times \mathbf {c} ])_{i}=\varepsilon _{ijk}a^{j}\varepsilon _{k\ell m}b^{\ell }c^{m}=\varepsilon _{ijk}\varepsilon _{k\ell m}a^{j}b^{\ell }c^{m}}](../I/m/fb2d0d2d3e3cee7b7f466c4d2b0d1b716b61bec4.svg)
referring to the th component of the resulting vector. This can be simplified by performing a contraction on the Levi-Civita symbols, where if and if . We can reason out this identity by recognizing that the index will be summed out leaving only and . In the first term, we fix and thus . Likewise, in the second term, we fix and thus .












Returning to the triple cross product,
![{\displaystyle (\mathbf {a} \times [\mathbf {b} \times \mathbf {c} ])_{i}=(\delta _{i\ell }\delta _{jm}-\delta _{im}\delta _{\ell j})a^{j}b^{\ell }c^{m}=a^{j}b^{i}c^{j}-a^{j}b^{j}c^{i}=\mathbf {b} _{i}(\mathbf {a} \cdot \mathbf {c} )-\mathbf {c} _{i}(\mathbf {a} \cdot \mathbf {b} )}](../I/m/cc35962348c89fb5242a06051f590758972f0a06.svg)
Notes
- ↑ Wong, Chun Wa (2013). Introduction to Mathematical Physics: Methods & Concepts. Oxford University Press. p. 215. ISBN 9780199641390.
- ↑ Joseph Louis Lagrange did not develop the cross product as an algebraic product on vectors, but did use an equivalent form of it in components: see Lagrange, J-L (1773). "Solutions analytiques de quelques problèmes sur les pyramides triangulaires". Oeuvres. vol 3. He may have written a formula similar to the triple product expansion in component form. See also Lagrange's identity and Kiyoshi Itō (1987). Encyclopedic Dictionary of Mathematics. MIT Press. p. 1679. ISBN 0-262-59020-4.
- ↑ Kiyoshi Itō (1993). "§C: Vector product". Encyclopedic dictionary of mathematics (2nd ed.). MIT Press. p. 1679. ISBN 0-262-59020-4.
- ↑ Pengzhi Lin (2008). Numerical Modelling of Water Waves: An Introduction to Engineers and Scientists. Routledge. p. 13. ISBN 0-415-41578-0.
- ↑ J. Heading (1970). Mathematical Methods in Science and Engineering. American Elsevier Publishing Company, Inc. pp. 262–263.
- 1 2 Pertti Lounesto (2001). Clifford algebras and spinors (2nd ed.). Cambridge University Press. p. 46. ISBN 0-521-00551-5.
- ↑ Janne Pesonen. "Geometric Algebra of One and Many Multivector Variables" (PDF). p. 37.
- ↑ "Permutation Tensor". Wolfram. Retrieved 21 May 2014.
References
- Lass, Harry (1950). Vector and Tensor Analysis. McGraw-Hill Book Company, Inc. pp. 23–25.