List of trigonometric identities

| Trigonometry |
|---|
 |
| Reference |
| Laws and theorems |
| Calculus |
In mathematics, trigonometric identities are equalities that involve trigonometric functions and are true for every value of the occurring variables where both sides of the equality are defined. Geometrically, these are identities involving certain functions of one or more angles. They are distinct from triangle identities, which are identities potentially involving angles but also involving side lengths or other lengths of a triangle.
These identities are useful whenever expressions involving trigonometric functions need to be simplified. An important application is the integration of non-trigonometric functions: a common technique involves first using the substitution rule with a trigonometric function, and then simplifying the resulting integral with a trigonometric identity.
Notation
Angles
This article uses Greek letters such as alpha (α), beta (β), gamma (γ), and theta (θ) to represent angles. Several different units of angle measure are widely used, including degrees, radians, and gradians (gons):
- 1 full circle (turn) = 360 degrees = 2π radians = 400 gons.
The following table shows the conversions and values for some common angles:
| Turns | Degrees | Radians | Gradians | sine | cosine | tangent |
|---|---|---|---|---|---|---|
| 0 | 0° | 0 | 0g | 0 | 1 | 0 |
| 1/12 | 30° | π/6 | 33 1/3g | 1/2 | √3/2 | √3/3 |
| 1/8 | 45° | π/4 | 50g | √2/2 | √2/2 | 1 |
| 1/6 | 60° | π/3 | 66 2/3g | √3/2 | 1/2 | √3 |
| 1/4 | 90° | π/2 | 100g | 1 | 0 | undef./∞ |
| 1/3 | 120° | 2π/3 | 133 1/3g | √3/2 | −1/2 | −√3 |
| 3/8 | 135° | 3π/4 | 150g | √2/2 | −√2/2 | −1 |
| 5/12 | 150° | 5π/6 | 166 2/3g | 1/2 | −√3/2 | −√3/3 |
| 1/2 | 180° | π | 200g | 0 | −1 | 0 |
| 7/12 | 210° | 7π/6 | 233 1/3g | −1/2 | −√3/2 | √3/3 |
| 5/8 | 225° | 5π/4 | 250g | −√2/2 | −√2/2 | 1 |
| 2/3 | 240° | 4π/3 | 266 2/3g | −√3/2 | −1/2 | √3 |
| 3/4 | 270° | 3π/2 | 300g | −1 | 0 | undef./∞ |
| 5/6 | 300° | 5π/3 | 333 1/3g | −√3/2 | 1/2 | −√3 |
| 7/8 | 315° | 7π/4 | 350g | −√2/2 | √2/2 | −1 |
| 11/12 | 330° | 11π/6 | 366 2/3g | −1/2 | √3/2 | −√3/3 |
| 1 | 360° | 2π | 400g | 0 | 1 | 0 |
Results for other angles can be found at Trigonometric constants expressed in real radicals.
All angles in this article are re-assumed to be in radians, but angles ending in a degree symbol (°) are in degrees. Per Niven's theorem multiples of 30° are the only angles that are a rational multiple of one degree and also have a rational sine or cosine, which may account for their popularity in examples.[1][2]
Trigonometric functions
The secondary trigonometric functions are the sine and cosine of an angle. These are sometimes abbreviated sin(θ) and cos(θ), respectively, where θ is the angle, but the parentheses around the angle are often omitted, e.g., sin θ and cos θ.
The sine of an angle is defined in the context of a right triangle, as the ratio of the length of the side that is opposite to the angle divided by the length of the longest side of the triangle (the hypotenuse).
The cosine of an angle is also defined in the context of a right triangle, as the ratio of the length of the side that is adjacent to the angle divided by the length of the longest side of the triangle (the hypotenuse).
The tangent (tan) of an angle is the ratio of the sine to the cosine:

Finally, the reciprocal functions secant (sec), cosecant (csc), and cotangent (cot) are the reciprocals of the cosine, sine, and tangent:

These definitions are sometimes referred to as ratio identities.
Inverse functions
The inverse trigonometric functions are partial inverse functions for the trigonometric functions. For example, the inverse function for the sine, known as the inverse sine (sin−1) or arcsine (arcsin or asin), satisfies

and

This article uses the notation below for inverse trigonometric functions:
| Function | sin | cos | tan | sec | csc | cot |
|---|---|---|---|---|---|---|
| Inverse | arcsin | arccos | arctan | arcsec | arccsc | arccot |
Pythagorean identities
In trigonometry, the basic relationship between the sine and the cosine is known as one of the Pythagorean identity:

where sin2 θ means (sin(θ))2 and cos2 θ means (cos(θ))2.
This can be viewed as a version of the Pythagorean theorem, and follows from the equation x2 + y2 = 1 for the unit circle. This equation can be solved for either the sine or the cosine:

where the sign depends on the quadrant of θ.
Dividing this identity by either sin2 θ or cos2 θ yields the other two Pythagorean identities:

Using these identities together with the ratio identities, it is possible to express any trigonometric function in terms of any other (up to a plus or minus sign):
| in terms of | ||||||
|---|---|---|---|---|---|---|
| |
||||||










































Historical shorthands
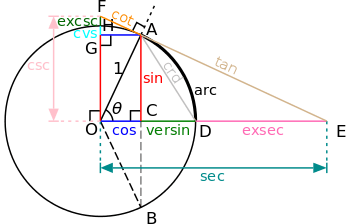
The versine, coversine, haversine, and exsecant were used in navigation. For example, the haversine formula was used to calculate the distance between two points on a sphere. They are rarely used today.
| Name | Abbreviation | Value[4][5] |
|---|---|---|
| versed sine, versine | |
|
| versed cosine, vercosine | |
|
| coversed sine, coversine | |
|
| coversed cosine, covercosine | |
|
| half versed sine, haversine | |
|
| half versed cosine, havercosine | |
|
| half coversed sine, hacoversine cohaversine |
|
|
| half coversed cosine, hacovercosine cohavercosine |
|
|
| exterior secant, exsecant | |
|
| exterior cosecant, excosecant | |
|
| chord |









































Symmetry, shifts, and periodicity
By examining the unit circle, the following properties of the trigonometric functions can be established.
Symmetry

When the trigonometric functions are reflected from certain angles, the result is often one of the other trigonometric functions. This leads to the following identities:
| Reflected in θ = 0[6] | Reflected in θ = π/4 (co-function identities)[7] |
Reflected in θ =
π/2 |
|---|---|---|



Shifts and periodicity
By shifting the function round by certain angles, it is often possible to find different trigonometric functions that express particular results more simply. Some examples of this are shown by shifting functions round by π/2, π and 2π radians. Because the periods of these functions are either π or 2π, there are cases where the new function is exactly the same as the old function without the shift.
| Shift by π/2 | Shift by π Period for tan and cot[8] |
Shift by 2π Period for sin, cos, csc and sec[9] |
|---|---|---|



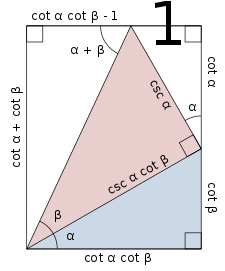
Angle sum and difference identities

These are also known as the addition and subtraction theorems or formulae. The identities can be derived by combining right triangles such as in the adjacent diagram, or by considering the invariance of the length of a chord on a unit circle given a particular central angle. Furthermore, it is even possible to derive the identities using Euler's identity although this would be a more obscure approach given that complex numbers are used.

For acute angles and , whose sum is non-obtuse, a concise diagram (shown) illustrates the angle sum formulas for sine and cosine: The bold segment labeled "1" has unit length and serves as the hypotenuse of a right triangle with angle β; the opposite and adjacent legs for this angle have respective lengths sin β and cos β. The cos β leg is itself the hypotenuse of a right triangle with angle α; that triangle's legs, therefore, have lengths given by sin α and cos α, multiplied by cos β. The sin β leg, as hypotenuse of another right triangle with angle , likewise leads to segments of length and . Now, we observe that the "1" segment is also the hypotenuse of a right triangle with angle α + β; the leg opposite this angle necessarily has length sin(α + β), while the leg adjacent has length cos(α + β). Consequently, as the opposing sides of the diagram's outer rectangle are equal, we deduce






Relocating one of the named angles yields a variant of the diagram that demonstrates the angle difference formulas for sine and cosine.[10] (The diagram admits further variants to accommodate angles and sums greater than a right angle.) Dividing all elements of the diagram by provides yet another variant (shown) illustrating the angle sum formula for tangent.

| Sine | [11][12] |
|---|---|
| Cosine | [12][13] |
| Tangent | [12][14] |
| Cotangent | [12][15] |
| Arcsine | [16] |
| Arccosine | [17] |
| Arctangent | [18] |
| atan2 | |
| Arccotangent |









Matrix form
The sum and difference formulae for sine and cosine can be written in matrix form as:
![{\displaystyle {\begin{aligned}&{}\quad \left({\begin{array}{rr}\cos \alpha &-\sin \alpha \\\sin \alpha &\cos \alpha \end{array}}\right)\left({\begin{array}{rr}\cos \beta &-\sin \beta \\\sin \beta &\cos \beta \end{array}}\right)\\[12pt]&=\left({\begin{array}{rr}\cos \alpha \cos \beta -\sin \alpha \sin \beta &-\cos \alpha \sin \beta -\sin \alpha \cos \beta \\\sin \alpha \cos \beta +\cos \alpha \sin \beta &-\sin \alpha \sin \beta +\cos \alpha \cos \beta \end{array}}\right)\\[12pt]&=\left({\begin{array}{rr}\cos(\alpha +\beta )&-\sin(\alpha +\beta )\\\sin(\alpha +\beta )&\cos(\alpha +\beta )\end{array}}\right).\end{aligned}}}](../I/m/cbbc83690fbaa9724724144f29919d3ad4f9d31c.svg)
This shows that these matrices form a representation of the rotation group in the plane (technically, the special orthogonal group SO(2)), since the composition law is fulfilled: subsequent multiplications of a vector with these two matrices yields the same result as the rotation by the sum of the angles.
Sines and cosines of sums of infinitely many terms


In these two identities an asymmetry appears that is not seen in the case of sums of finitely many terms: in each product, there are only finitely many sine factors and cofinitely many cosine factors.
If only finitely many of the terms θi are nonzero, then only finitely many of the terms on the right side will be nonzero because sine factors will vanish, and in each term, all but finitely many of the cosine factors will be unity.
Tangents of sums
Let ek (for k = 0, 1, 2, 3, ...) be the kth-degree elementary symmetric polynomial in the variables

for i = 0, 1, 2, 3, ..., i.e.,
![{\displaystyle {\begin{aligned}e_{0}&=1\\[6pt]e_{1}&=\sum _{i}x_{i}&&=\sum _{i}\tan \theta _{i}\\[6pt]e_{2}&=\sum _{i<j}x_{i}x_{j}&&=\sum _{i<j}\tan \theta _{i}\tan \theta _{j}\\[6pt]e_{3}&=\sum _{i<j<k}x_{i}x_{j}x_{k}&&=\sum _{i<j<k}\tan \theta _{i}\tan \theta _{j}\tan \theta _{k}\\&{}\ \ \vdots &&{}\ \ \vdots \end{aligned}}}](../I/m/9fe5c7c43e0176206f134067e005328cb0a31cce.svg)
Then

The number of terms on the right side depends on the number of terms on the left side.
For example:
![{\displaystyle {\begin{aligned}\tan(\theta _{1}+\theta _{2})&={\frac {e_{1}}{e_{0}-e_{2}}}={\frac {x_{1}+x_{2}}{1\ -\ x_{1}x_{2}}}={\frac {\tan \theta _{1}+\tan \theta _{2}}{1\ -\ \tan \theta _{1}\tan \theta _{2}}},\\[8pt]\tan(\theta _{1}+\theta _{2}+\theta _{3})&={\frac {e_{1}-e_{3}}{e_{0}-e_{2}}}={\frac {(x_{1}+x_{2}+x_{3})\ -\ (x_{1}x_{2}x_{3})}{1\ -\ (x_{1}x_{2}+x_{1}x_{3}+x_{2}x_{3})}},\\[8pt]\tan(\theta _{1}+\theta _{2}+\theta _{3}+\theta _{4})&={\frac {e_{1}-e_{3}}{e_{0}-e_{2}+e_{4}}}\\[8pt]&={\frac {(x_{1}+x_{2}+x_{3}+x_{4})\ -\ (x_{1}x_{2}x_{3}+x_{1}x_{2}x_{4}+x_{1}x_{3}x_{4}+x_{2}x_{3}x_{4})}{1\ -\ (x_{1}x_{2}+x_{1}x_{3}+x_{1}x_{4}+x_{2}x_{3}+x_{2}x_{4}+x_{3}x_{4})\ +\ (x_{1}x_{2}x_{3}x_{4})}},\end{aligned}}}](../I/m/4c9196b8ab5e0aef6cf7d7fec7d7546f2a6e7d2f.svg)
and so on. The case of only finitely many terms can be proved by mathematical induction.[19]
Secants and cosecants of sums
![{\begin{aligned}\sec \left(\sum _{i}\theta _{i}\right)&={\frac {\prod _{i}\sec \theta _{i}}{e_{0}-e_{2}+e_{4}-\cdots }}\\[8pt]\csc \left(\sum _{i}\theta _{i}\right)&={\frac {\prod _{i}\sec \theta _{i}}{e_{1}-e_{3}+e_{5}-\cdots }}\end{aligned}}](../I/m/f7d12744003bcf5becf301096c3d12ca1d1e1055.svg)
where ek is the kth-degree elementary symmetric polynomial in the n variables xi = tan θi, i = 1, ..., n, and the number of terms in the denominator and the number of factors in the product in the numerator depend on the number of terms in the sum on the left.[20] The case of only finitely many terms can be proved by mathematical induction on the number of such terms. The convergence of the series in the denominators can be shown by writing the secant identity in the form

and then observing that the left side converges if the right side converges, and similarly for the cosecant identity.
For example,
![{\begin{aligned}\sec(\alpha +\beta +\gamma )&={\frac {\sec \alpha \sec \beta \sec \gamma }{1-\tan \alpha \tan \beta -\tan \alpha \tan \gamma -\tan \beta \tan \gamma }}\\[8pt]\csc(\alpha +\beta +\gamma )&={\frac {\sec \alpha \sec \beta \sec \gamma }{\tan \alpha +\tan \beta +\tan \gamma -\tan \alpha \tan \beta \tan \gamma }}.\end{aligned}}](../I/m/e082e69aab7a9c782f590f3a93262ba3101899b7.svg)
Multiple-angle formulae
| Tn is the nth Chebyshev polynomial | [21] |
|---|---|
| Sn is the nth spread polynomial | |
| de Moivre's formula, i is the imaginary unit | [22] |



Double-angle, triple-angle, and half-angle formulae
Double-angle formulae




Triple-angle formulae




Half-angle formulae






Also



Table
These can be shown by using either the sum and difference identities or the multiple-angle formulae.
| Sine | Cosine | Tangent | Cotangent | |
|---|---|---|---|---|
| Double-angle formulae[26][27] | ||||
| Triple-angle formulae[21][23] | ||||
| Half-angle formulae[24][25] |






![{\displaystyle {\begin{aligned}\tan {\frac {\theta }{2}}&=\csc \theta -\cot \theta \\&=\pm \,{\sqrt {\frac {1-\cos \theta }{1+\cos \theta }}}\\[8pt]&={\frac {\sin \theta }{1+\cos \theta }}\\[8pt]&={\frac {1-\cos \theta }{\sin \theta }}\\[10pt]\tan {\frac {\eta +\theta }{2}}&={\frac {\sin \eta +\sin \theta }{\cos \eta +\cos \theta }}\\[8pt]\tan \left({\frac {\theta }{2}}+{\frac {\pi }{4}}\right)&=\sec \theta +\tan \theta \\[8pt]{\sqrt {\frac {1-\sin \theta }{1+\sin \theta }}}&={\frac {1-\tan {\frac {\theta }{2}}}{1+\tan {\frac {\theta }{2}}}}\\[8pt]\tan {\frac {\theta }{2}}&={\frac {\tan \theta }{1+{\sqrt {1+\tan ^{2}\theta }}}}\\&{\mbox{for}}\quad \theta \in \left(-{\tfrac {\pi }{2}},{\tfrac {\pi }{2}}\right)\end{aligned}}}](../I/m/112c5204e34070a82f1f473e1357a55d85b860b2.svg)
![{\displaystyle {\begin{aligned}\cot {\frac {\theta }{2}}&=\csc \theta +\cot \theta \\&=\pm \,{\sqrt {\frac {1+\cos \theta }{1-\cos \theta }}}\\[8pt]&={\frac {\sin \theta }{1-\cos \theta }}\\[8pt]&={\frac {1+\cos \theta }{\sin \theta }}\end{aligned}}}](../I/m/12251364e14e4b47b1ea1ac155514628131d66c4.svg)
The fact that the triple-angle formula for sine and cosine only involves powers of a single function allows one to relate the geometric problem of a compass and straightedge construction of angle trisection to the algebraic problem of solving a cubic equation, which allows one to prove that trisection is in general impossible using the given tools, by field theory.
A formula for computing the trigonometric identities for the one-third angle exists, but it requires finding the zeroes of the cubic equation 4x3 − 3x + d = 0, where x is the value of the cosine function at the one-third angle and d is the known value of the cosine function at the full angle. However, the discriminant of this equation is positive, so this equation has three real roots (of which only one is the solution for the cosine of the one-third angle). None of these solutions is reducible to a real algebraic expression, as they use intermediate complex numbers under the cube roots.
Sine, cosine, and tangent of multiple angles
For specific multiples, these follow from the angle addition formulas, while the general formula was given by 16th-century French mathematician François Viète.

In each of these two equations, the first parenthesized term is a binomial coefficient, and the final trigonometric function equals one or minus one or zero so that half the entries in each of the sums are removed. tan nθ can be written in terms of tan θ using the recurrence relation:

cot nθ can be written in terms of cot θ using the recurrence relation:

Chebyshev method
The Chebyshev method is a recursive algorithm for finding the nth multiple angle formula knowing the (n − 1)th and (n − 2)th formulae.[28]
cos(nx) can be computed from the cosine of (n − 1)x and (n − 2)x as follows:

Similarly sin(nx) can be computed from the sines of (n − 1)x and (n − 2)x

For the tangent, we have:

where H/K = tan(n − 1)x.
Tangent of an average

Setting either α or β to 0 gives the usual tangent half-angle formulae.
Viète's infinite product

(Refer to sinc function.)
Power-reduction formulae
Obtained by solving the second and third versions of the cosine double-angle formula.
| Sine | Cosine | Other |
|---|---|---|












and in general terms of powers of sin θ or cos θ the following is true, and can be deduced using De Moivre's formula, Euler's formula and the binomial theorem .
| Cosine | Sine | |
|---|---|---|






Product-to-sum and sum-to-product identities
The product-to-sum identities or prosthaphaeresis formulas can be proven by expanding their right-hand sides using the angle addition theorems. See amplitude modulation for an application of the product-to-sum formulae, and beat (acoustics) and phase detector for applications of the sum-to-product formulae.
| Product-to-sum[29] |
|---|





![{\begin{aligned}\prod _{k=1}^{n}\cos \theta _{k}&={\frac {1}{2^{n}}}\sum _{e\in S}\cos(e_{1}\theta _{1}+\cdots +e_{n}\theta _{n})\\[6pt]&{\text{where }}S=\{1,-1\}^{n}\end{aligned}}](../I/m/a86e836e8111fd80b7c225d1c4394bf4ac8459e5.svg)
| Sum-to-product[30] |
|---|



Other related identities
- [31]
- If x + y + z = π (half circle), then
- Triple tangent identity: If x + y + z = π (half circle), then



- In particular, the formula holds when x, y, and z are the three angles of any triangle.
- (If any of x, y, z is a right angle, one should take both sides to be ∞. This is neither +∞ nor −∞; for present purposes it makes sense to add just one point at infinity to the real line, that is approached by tan θ as tan θ either increases through positive values or decreases through negative values. This is a one-point compactification of the real line.)
- Triple cotangent identity: If x + y + z = π/2 (right angle or quarter circle), then

Hermite's cotangent identity
Charles Hermite demonstrated the following identity.[32] Suppose a1, ..., an are complex numbers, no two of which differ by an integer multiple of π. Let

(in particular, A1,1, being an empty product, is 1). Then

The simplest non-trivial example is the case n = 2:

Ptolemy's theorem
Ptolemy's theorem can be expressed in the language of modern trigonometry as:
- If w + x + y + z = π, then:

(The first three equalities are trivial rearrangements; the fourth is the substance of this identity.)
Linear combinations
For some purposes it is important to know that any linear combination of sine waves of the same period or frequency but different phase shifts is also a sine wave with the same period or frequency, but a different phase shift. This is useful in sinusoid data fitting, because the measured or observed data are linearly related to the a and b unknowns of the in-phase and quadrature components basis below, resulting in a simpler Jacobian, compared to that of c and φ.
Sine and cosine
The linear combination, or harmonic addition, of sine and cosine waves is equivalent to a single sine wave with a phase shift and scaled amplitude,[33][34][35]

where the original amplitudes and sum in quadrature to yield the combined amplitude ,




and, using the atan2 function, the initial value of the phase angle is obtained by,


Arbitrary phase shift
More generally, for an arbitrary phase shift, we have

where

and

More than two sinusoids
The general case reads,[36]

where

and

See also Phasor addition.
Lagrange's trigonometric identities
These identities, named after Joseph Louis Lagrange, are:[37][38]

A related function is the following function of x, called the Dirichlet kernel.

see proof.
Other sums of trigonometric functions
Sum of sines and cosines with arguments in arithmetic progression:[39] if α ≠ 0, then
![{\begin{aligned}&\sin \varphi +\sin(\varphi +\alpha )+\sin(\varphi +2\alpha )+\cdots \\[8pt]&{}\qquad \qquad \cdots +\sin(\varphi +n\alpha )={\frac {\sin {\frac {(n+1)\alpha }{2}}\cdot \sin(\varphi +{\frac {n\alpha }{2}})}{\sin {\frac {\alpha }{2}}}}\quad {\text{and}}\\[10pt]&\cos \varphi +\cos(\varphi +\alpha )+\cos(\varphi +2\alpha )+\cdots \\[8pt]&{}\qquad \qquad \cdots +\cos(\varphi +n\alpha )={\frac {\sin {\frac {(n+1)\alpha }{2}}\cdot \cos(\varphi +{\frac {n\alpha }{2}})}{\sin {\frac {\alpha }{2}}}}.\end{aligned}}](../I/m/5b43456ae300839ced3594491868e6125c7b2e3d.svg)
For any a and b:

where atan2(y, x) is the generalization of arctan(y/x) that covers the entire circular range.

The above identity is sometimes convenient to know when thinking about the Gudermannian function, which relates the circular and hyperbolic trigonometric functions without resorting to complex numbers.
If x, y, and z are the three angles of any triangle, i.e. if x + y + z = π, then

Certain linear fractional transformations
If f(x) is given by the linear fractional transformation

and similarly

then

More tersely stated, if for all α we let fα be what we called f above, then

If x is the slope of a line, then f(x) is the slope of its rotation through an angle of −α.
Inverse trigonometric functions


Compositions of trig and inverse trig functions

Relation to the complex exponential function






and hence the corollary:

where i2 = −1.
Infinite product formulae
For applications to special functions, the following infinite product formulae for trigonometric functions are useful:[44][45]
![{\displaystyle {\begin{aligned}\sin x&=x\prod _{n=1}^{\infty }\left(1-{\frac {x^{2}}{\pi ^{2}n^{2}}}\right)\\\sinh x&=x\prod _{n=1}^{\infty }\left(1+{\frac {x^{2}}{\pi ^{2}n^{2}}}\right)\\{\frac {\sin x}{x}}&=\prod _{n=1}^{\infty }\cos {\frac {x}{2^{n}}}\end{aligned}}\ \,{\begin{aligned}\cos x&=\prod _{n=1}^{\infty }\left(1-{\frac {x^{2}}{\pi ^{2}(n-{\frac {1}{2}})^{2}}}\right)\\\cosh x&=\prod _{n=1}^{\infty }\left(1+{\frac {x^{2}}{\pi ^{2}(n-{\frac {1}{2}})^{2}}}\right)\\|\sin x|&={\frac {1}{2}}\prod _{n=0}^{\infty }{\sqrt[{2^{n+1}}]{\left|\tan \left(2^{n}x\right)\right|}}\end{aligned}}}](../I/m/c8c14aaad3e338d44553e8762837af4d44498529.svg)
Identities without variables
In terms of the arctangent function we have[40]

The curious identity known as Morrie's law,

is a special case of an identity that contains one variable:

The same cosine identity in radians is

Similarly,

is a special case of an identity with the case x = 20:

For the case x = 15,


For the case x = 10,

The same cosine identity is

Similary,



Similarly,


The following is perhaps not as readily generalized to an identity containing variables (but see explanation below):

Degree measure ceases to be more felicitous than radian measure when we consider this identity with 21 in the denominators:
![{\displaystyle {\begin{aligned}&\cos {\frac {2\pi }{21}}+\cos \left(2\cdot {\frac {2\pi }{21}}\right)+\cos \left(4\cdot {\frac {2\pi }{21}}\right)\\[10pt]&{}\qquad {}+\cos \left(5\cdot {\frac {2\pi }{21}}\right)+\cos \left(8\cdot {\frac {2\pi }{21}}\right)+\cos \left(10\cdot {\frac {2\pi }{21}}\right)={\frac {1}{2}}.\end{aligned}}}](../I/m/8451fe2f10582cc02bfcee16c9f19b5d051c9c42.svg)
The factors 1, 2, 4, 5, 8, 10 may start to make the pattern clear: they are those integers less than 21/2 that are relatively prime to (or have no prime factors in common with) 21. The last several examples are corollaries of a basic fact about the irreducible cyclotomic polynomials: the cosines are the real parts of the zeroes of those polynomials; the sum of the zeroes is the Möbius function evaluated at (in the very last case above) 21; only half of the zeroes are present above. The two identities preceding this last one arise in the same fashion with 21 replaced by 10 and 15, respectively.
Other cosine identities include:[46]



and so forth for all odd numbers, and hence

Many of those curious identities stem from more general facts like the following:[47]

and

Combining these gives us

If n is an odd number (n = 2m + 1) we can make use of the symmetries to get

The transfer function of the Butterworth low pass filter can be expressed in terms of polynomial and poles. By setting the frequency as the cutoff frequency, the following identity can be proved:

Computing π
An efficient way to compute π is based on the following identity without variables, due to Machin:

or, alternatively, by using an identity of Leonhard Euler:

or by using Pythagorean triples:

Others include



A useful mnemonic for certain values of sines and cosines
For certain simple angles, the sines and cosines take the form √n/2 for 0 ≤ n ≤ 4, which makes them easy to remember.
![{\displaystyle {\begin{matrix}\sin 0&=&\sin 0^{\circ }&=&{\frac {\sqrt {0}}{2}}&=&\cos 90^{\circ }&=&\cos {\frac {\pi }{2}}\\[5pt]\sin {\frac {\pi }{6}}&=&\sin 30^{\circ }&=&{\frac {\sqrt {1}}{2}}&=&\cos 60^{\circ }&=&\cos {\frac {\pi }{3}}\\[5pt]\sin {\frac {\pi }{4}}&=&\sin 45^{\circ }&=&{\frac {\sqrt {2}}{2}}&=&\cos 45^{\circ }&=&\cos {\frac {\pi }{4}}\\[5pt]\sin {\frac {\pi }{3}}&=&\sin 60^{\circ }&=&{\frac {\sqrt {3}}{2}}&=&\cos 30^{\circ }&=&\cos {\frac {\pi }{6}}\\[5pt]\sin {\frac {\pi }{2}}&=&\sin 90^{\circ }&=&{\frac {\sqrt {4}}{2}}&=&\cos 0^{\circ }&=&\cos 0\\[6pt]&&&&\uparrow \\&&&&{\text{These}}\\&&&&{\text{radicands}}\\&&&&{\text{are}}\\&&&&0,\,1,\,2,\,3,\,4.\end{matrix}}}](../I/m/ba89de7d2929b1453076de42bbf251ad78129f5e.svg)
Miscellany
With the golden ratio φ:


Also see trigonometric constants expressed in real radicals.
An identity of Euclid
Euclid showed in Book XIII, Proposition 10 of his Elements that the area of the square on the side of a regular pentagon inscribed in a circle is equal to the sum of the areas of the squares on the sides of the regular hexagon and the regular decagon inscribed in the same circle. In the language of modern trigonometry, this says:

Ptolemy used this proposition to compute some angles in his table of chords.
Composition of trigonometric functions
This identity involves a trigonometric function of a trigonometric function:[49]




where Ji are Bessel functions.
Calculus
In calculus the relations stated below require angles to be measured in radians; the relations would become more complicated if angles were measured in another unit such as degrees. If the trigonometric functions are defined in terms of geometry, along with the definitions of arc length and area, their derivatives can be found by verifying two limits. The first is:

verified using the unit circle and squeeze theorem. The second limit is:

verified using the identity tan x/2 = 1 − cos x/sin x. Having established these two limits, one can use the limit definition of the derivative and the addition theorems to show that (sin x)′ = cos x and (cos x)′ = −sin x. If the sine and cosine functions are defined by their Taylor series, then the derivatives can be found by differentiating the power series term-by-term.

The rest of the trigonometric functions can be differentiated using the above identities and the rules of differentiation:[50][51][52]

The integral identities can be found in List of integrals of trigonometric functions. Some generic forms are listed below.



Implications
The fact that the differentiation of trigonometric functions (sine and cosine) results in linear combinations of the same two functions is of fundamental importance to many fields of mathematics, including differential equations and Fourier transforms.
Some differential equations satisfied by the sine function
Let i = √−1 be the imaginary unit and let ∘ denote composition of differential operators. Then for every odd positive integer n,

(When k = 0, then the number of differential operators being composed is 0, so the corresponding term in the sum above is just (sin x)n.) This identity was discovered as a by-product of research in medical imaging.[53]
Exponential definitions
| Function | Inverse function[54] |
|---|---|














Miscellaneous
Dirichlet kernel
The Dirichlet kernel Dn(x) is the function occurring on both sides of the next identity:

The convolution of any integrable function of period 2π with the Dirichlet kernel coincides with the function's nth-degree Fourier approximation. The same holds for any measure or generalized function.
Tangent half-angle substitution
If we set

then[55]

where eix = cos x + i sin x, sometimes abbreviated to cis x.
When this substitution of t for tan x/2 is used in calculus, it follows that sin x is replaced by 2t/1 + t2, cos x is replaced by 1 − t2/1 + t2 and the differential dx is replaced by 2 dt/1 + t2. Thereby one converts rational functions of sin x and cos x to rational functions of t in order to find their antiderivatives.
See also
- Derivatives of trigonometric functions
- Exact trigonometric constants (values of sine and cosine expressed in surds)
- Exsecant
- Half-side formula
- Hyperbolic function
- Laws for solution of triangles:
- List of integrals of trigonometric functions
- Proofs of trigonometric identities
- Prosthaphaeresis
- Pythagorean theorem
- Tangent half-angle formula
- Trigonometry
- Trigonometric constants expressed in real radicals
- Uses of trigonometry
- Versine and haversine
Notes
- ↑ Schaumberger, N. (1974). "A Classroom Theorem on Trigonometric Irrationalities". Two-Year College Math. J. 5: 73–76. doi:10.2307/3026991.
- ↑ Weisstein, Eric W. "Niven's Theorem". MathWorld.
- ↑ Abramowitz and Stegun, p. 73, 4.3.45
- ↑ Abramowitz and Stegun, p. 78, 4.3.147
- ↑ Nielsen (1966, pp. xxiii–xxiv)
- ↑ Abramowitz and Stegun, p. 72, 4.3.13–15
- ↑ Bales, John W. (2012) [2001]. "5.1 The Elementary Identities". Precalculus. Archived from the original on 2017-07-30. Retrieved 2017-07-30.
- ↑ Abramowitz and Stegun, p. 72, 4.3.9
- ↑ Abramowitz and Stegun, p. 72, 4.3.7–8
- ↑ The Trigonographer (28 September 2015). "Angle Sum and Difference for Sine and Cosine". Trigonography.com. Retrieved 28 May 2017.
- ↑ Abramowitz and Stegun, p. 72, 4.3.16
- 1 2 3 4 Weisstein, Eric W. "Trigonometric Addition Formulas". MathWorld.
- ↑ Abramowitz and Stegun, p. 72, 4.3.17
- ↑ Abramowitz and Stegun, p. 72, 4.3.18
- ↑ Abramowitz and Stegun, p. 72, 4.3.19
- ↑ Abramowitz and Stegun, p. 80, 4.4.42
- ↑ Abramowitz and Stegun, p. 80, 4.4.33
- ↑ Abramowitz and Stegun, p. 80, 4.4.36
- ↑ Bronstein, Manuel (1989). "Simplification of real elementary functions". In Gonnet, G. H. Proceedings of the ACM-SIGSAM 1989 International Symposium on Symbolic and Algebraic Computation. ISSAC '89 (Portland US-OR, 1989-07). New York: ACM. pp. 207–211. ISBN 0-89791-325-6. doi:10.1145/74540.74566.
- ↑ Michael Hardy (August–September 2016). "On Tangents and Secants of Infinite Sums". American Mathematical Monthly. 123 (7): 701–703. doi:10.4169/amer.math.monthly.123.7.701.
- 1 2 3 Weisstein, Eric W. "Multiple-Angle Formulas". MathWorld.
- ↑ Abramowitz and Stegun, p. 74, 4.3.48
- 1 2 Abramowitz and Stegun, p. 72, 4.3.27–28
- 1 2 Abramowitz and Stegun, p. 72, 4.3.20–22
- 1 2 Weisstein, Eric W. "Half-Angle Formulas". MathWorld.
- ↑ Abramowitz and Stegun, p. 72, 4.3.24–26
- ↑ Weisstein, Eric W. "Double-Angle Formulas". MathWorld.
- ↑ Ward, Ken. "Multiple angles recursive formula". Ken Ward's Mathematics Pages.
- ↑ Abramowitz and Stegun, p. 72, 4.3.31–33
- ↑ Abramowitz and Stegun, p. 72, 4.3.34–39
- ↑ Nelson, Roger. "Mathematics Without Words", The College Mathematics Journal 33(2), March 2002, p. 130.
- ↑ Johnson, Warren P. (Apr 2010). "Trigonometric Identities à la Hermite". American Mathematical Monthly. 117 (4): 311–327. doi:10.4169/000298910x480784.
- ↑ Cazelais, Gilles (18 February 2007). "Linear Combination of Sine and Cosine" (PDF).
- ↑ Apostol, T.M. (1967) Calculus. 2nd edition. New York, NY, Wiley. Pp 334-335.
- ↑ Weisstein, Eric W. "Harmonic Addition Theorem". MathWorld.
- ↑ Weisstein, Eric W. "Harmonic Addition Theorem". MathWorld.
- ↑ Ortiz Muñiz, Eddie (Feb 1953). "A Method for Deriving Various Formulas in Electrostatics and Electromagnetism Using Lagrange's Trigonometric Identities". American Journal of Physics. 21 (2): 140. doi:10.1119/1.1933371.
- ↑ Jeffrey, Alan; Dai, Hui-hui (2008). "Section 2.4.1.6". Handbook of Mathematical Formulas and Integrals (4th ed.). Academic Press. ISBN 978-0-12-374288-9.
- ↑ Knapp, Michael P. "Sines and Cosines of Angles in Arithmetic Progression" (PDF).
- 1 2 3 4 Wu, Rex H. "Proof Without Words: Euler's Arctangent Identity", Mathematics Magazine 77(3), June 2004, p. 189.
- ↑ Abramowitz and Stegun, p. 74, 4.3.47
- ↑ Abramowitz and Stegun, p. 71, 4.3.2
- ↑ Abramowitz and Stegun, p. 71, 4.3.1
- ↑ Abramowitz and Stegun, p. 75, 4.3.89–90
- ↑ Abramowitz and Stegun, p. 85, 4.5.68–69
- ↑ Humble, Steve (Nov 2004). "Grandma's identity". Mathematical Gazette. 88: 524–525. doi:10.1017/s0025557200176223.
- ↑ Weisstein, Eric W. "Sine". MathWorld.
- 1 2 Harris, Edward M. "Sums of Arctangents", in Roger B. Nelson, Proofs Without Words (1993, Mathematical Association of America), p. 39.
- ↑ Milton Abramowitz and Irene Stegun, Handbook of Mathematical Functions with Formulas, Graphs, and Mathematical Tables, Dover Publications, New York, 1972, formulae 9.1.42–9.1.45
- ↑ Abramowitz and Stegun, p. 77, 4.3.105–110
- ↑ Abramowitz and Stegun, p. 82, 4.4.52–57
- ↑ Finney, Ross (2003). Calculus : Graphical, Numerical, Algebraic. Glenview, Illinois: Prentice Hall. pp. 159–161. ISBN 0-13-063131-0.
- ↑ Kuchment, Peter; Lvin, Sergey (Aug 2013). "Identities for sin x that Came from Medical Imaging". American Mathematical Monthly. 120: 609–621. doi:10.4169/amer.math.monthly.120.07.609.
- ↑ Abramowitz and Stegun, p. 80, 4.4.26–31
- ↑ Abramowitz and Stegun, p. 72, 4.3.23
References
- Abramowitz, Milton; Stegun, Irene A., eds. (1972). Handbook of Mathematical Functions with Formulas, Graphs, and Mathematical Tables. New York: Dover Publications. ISBN 978-0-486-61272-0.
- Nielsen, Kaj L. (1966), Logarithmic and Trigonometric Tables to Five Places (2nd ed.), New York: Barnes & Noble, LCCN 61-9103
External links
- Construction proof for sine and cosine of the sum of two angles
- Values of sin and cos, expressed in surds, for integer multiples of 3° and of 5 5/8°, and for the same angles csc and sec and tan