Resource-Task Network
The Resource-Task Network (RTN) is a unified framework for the description and solution of a variety of process scheduling problems. It was developed by Prof. Costas Pantelides [1] at the Centre for Process Systems Engineering, Imperial College of Science, Technology and Medicine in London, U.K. The RTN allows the development of simple mathematical programming formulations based on the uniform characterisation of all available resources.
Process Representation
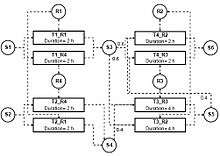
The RTN regards all processes as bipartite graphs comprising two types of nodes: Resources and Tasks. A task is an operation that transforms a certain set of resources into another set. The concept of resource is entirely general and includes all entities that are involved in the process steps, such as materials (raw-materials, intermediates and products), processing and storage equipment (tanks, reactors, etc.), utilities (operators, steam, etc.) as well as equipment conditions (clean, dirty).
RTN-based Scheduling Formulations
RTN-based mathematical formulations can either be discrete-time or continuous-time formulations. The original is a discrete-time formulation, where the time horizon of interest is discretized into a fixed number (T) of uniform time intervals. Since then, a few continuous-time formulations based on the RTN have appeared and the currently most efficient ones can be found in [2] for multipurpose plants and in [3] for multistage plants.
See also
References
- ↑ Constantinos C. Pantelides: "Unified Frameworks for the Optimal Process Planning and Scheduling. Proceedings of the 2nd Conference on the Foundations of Computer Aided Operations", page 253. New York: Cache Publications: 1994.
- ↑ Pedro M. Castro, Ana P. Barbosa-Póvoa, Henrique A. Matos and Augusto Q. Novais: "Simple Continuous-Time Formulation for Short-Term Scheduling of Batch and Continuous Processes" Ind. Eng. Chem. Res. 2004, 43, 105-118.
- ↑ Pedro M. Castro, Ignacio E. Grossmann and Augusto Q. Novais : "New Continuous-Time Models for the Scheduling of Multistage Batch Plants with Sequence Dependent Changeovers" Ind. Eng. Chem. Res. 2006, 45, 6120-6226.