Backward Euler method
In numerical analysis and scientific computing, the backward Euler method (or implicit Euler method) is one of the most basic numerical methods for the solution of ordinary differential equations. It is similar to the (standard) Euler method, but differs in that it is an implicit method. The backward Euler method has order one in time.
Description
Consider the ordinary differential equation

with initial value Here the function and the initial data and are known; the function depends on the real variable and is unknown. A numerical method produces a sequence such that approximates , where is called the step size.










The backward Euler method computes the approximations using

This differs from the (forward) Euler method in that the latter uses in place of .


The backward Euler method is an implicit method: the new approximation appears on both sides of the equation, and thus the method needs to solve an algebraic equation for the unknown . Sometimes, this can be done by fixed-point iteration:

![y_{{k+1}}^{{[0]}}=y_{k},\quad y_{{k+1}}^{{[i+1]}}=y_{k}+hf(t_{{k+1}},y_{{k+1}}^{{[i]}}).](../I/m/9e8e8501d252780d672b65b22097d0b01afdc9c0.svg)
If this sequence converges (within a given tolerance), then the method takes its limit as the new approximation .[2]
Alternatively, one can use (some modification of) the Newton–Raphson method to solve the algebraic equation.
Derivation
Integrating the differential equation from to yields



Now approximate the integral on the right by the right-hand rectangle method (with one rectangle):

Finally, use that is supposed to approximate and the formula for the backward Euler method follows.[3]


The same reasoning leads to the (standard) Euler method if the left-hand rectangle rule is used instead of the right-hand one.
Analysis
The backward Euler method has order one. This means that the local truncation error (defined as the error made in one step) is , using the big O notation. The error at a specific time is .


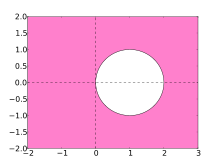
The region of absolute stability for the backward Euler method is the complement in the complex plane of the disk with radius 1 centered at 1, depicted in the figure.[4] This includes the whole left half of the complex plane, making it suitable for the solution of stiff equations.[5] In fact, the backward Euler method is even L-stable.
Extensions and modifications
The backward Euler method is a variant of the (forward) Euler method. Other variants are the semi-implicit Euler method and the exponential Euler method.
The backward Euler method can be seen as a Runge–Kutta method with one stage, described by the Butcher tableau:

The backward Euler method can also be seen as a linear multistep method with one step. It is the first method of the family of Adams–Moulton methods, and also of the family of backward differentiation formulas.
See also
Notes
- ↑ Butcher 2003, p. 57
- ↑ Butcher 2003, p. 57
- ↑ Butcher 2003, p. 57
- ↑ Butcher 2003, p. 70
- ↑ Butcher 2003, p. 71
References
- Butcher, John C. (2003), Numerical Methods for Ordinary Differential Equations, New York: John Wiley & Sons, ISBN 978-0-471-96758-3.