VisualSim Architect
|
VisualSim Model | |
| Operating system | Linux, OS X, Microsoft Windows |
|---|---|
| Website | www.mirabilisdesign.com/new/visualsim/ |
VisualSim Architect
VisualSim Architect is an electronic system-level software for modeling and simulation of electronic systems, embedded software and semiconductors. VisualSim Architect is a commercial version of the Ptolemy II research project at University of California Berkeley.[1] The product was first released in 2003. VisualSim is a graphical tool that can be used for performance trade-off analyses using such metrics as bandwidth utilization, application response time and buffer requirements. It can be used for architectural analysis of algorithms, components, software instructions and hardware/ software partitioning.[2]
VisualSim is used by over 50 companies worldwide and a similar number of universities for research projects. A list of the customers is provided on Mirabilis Design website.[3] Ricoh has used VisualSim to architect the next generation network processing system.[4] Honeywell Aerospace has collaborated with University of Puerto Rico and used VisualSim to evaluate standards-based satellite platforms.[5] NASA JPL worked on the Nexus initiative to develop the next generation interface standard. To select the best interface to meet the deterministic timing and maximum power consumption, architects build models of 10 different protocols including PCIe, Gigabit Ethernet and RapidIO to compare the behaviour for the same workload.[6] American University of Sharjah used performance evaluation methodologies to leverage exploration at the architectural level and assist in making early design tradeoffs. In this paper,[7] the professor used the simulation platforms developed using the VisualSim tool to compare the performance of two memory architectures, namely, the Direct Connect architecture of the Opteron, and the Shared Bus of the Xeon multicore processors.
Research and development on improving system architectures has been performed in networking, avionics, industrial, semiconductors, and high-performance computing fields.[8] FPGA designers can perform high-speed virtual simulation of large electronic systems using VisualSim. As part of the Xilinx ESL initiative, the company has added support for on-FPGA CPUs.[9]
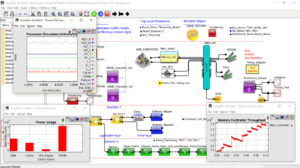
Block Diagram Editor is the primary graphical user interface and is supported with customizable library blocks of hardware, software and communication resources. Graphical viewers can be placed in the model for real-time viewing or saving for offline analysis. VisualSim has taken SystemC modelling into a higher level of abstraction. It also provides automatic template generation and intellectual-property (IP) block importation. And it adds function calls designed to lift SystemC to a "macroarchitectural" level[10]
VisualSim is widely used for Performance Modeling, Architecture Exploration/ Design Space exploration and early power analysis of Avionics, Automotive Electronics, Embedded Systems, High Performance Computing Systems (HPC) and System-on-Chip (SoC).
VisualSim simulation models of the proposed systems can be developed at various levels of hierarchy: Conceptual, Functional and Architectural Level Modeling. The conceptual level models can contain a network of systems including Satellites, Aircrafts and Ground vehicles. VisualSim functional models contain stochastic definitions of electronics, software, networks and workload. Various types of statistical traffic generators and queuing models of the resources are available in the library folder. At architectural level, the hardware and software models have cycle accurate blocks of processors, memory-subsystems, bus protocols and trace files. Software behaviour /application behaviour can be defined using a State Machine, flow diagram, read/write operations and IO activity. The mapping of the application to the system platform is defined in a spreadsheet. Communication architecture between different systems or sub-systems can be defined using VisualSim networking and wireless libraries. Software task arbitration and scheduling can be defined using VisualSim schedulers or the scripting language. The legacy models can be obtained by importing third-party models built in SystemC or C/C++. Algorithms developed using MatLab and Simulink can be used as a part of VisualSim model.
References
- ↑ "VisualSim, built on top of Ptolemy II". ptolemy.eecs.berkeley.edu. Retrieved 2016-02-03.
- ↑ "Startup tackles system architecture | EE Times". EETimes. Retrieved 2016-02-03.
- ↑ "Users of VisualSim Architect - Mirabilis Design Inc.". Mirabilis Design Inc. Retrieved 2016-02-03.
- ↑ "Mirabilis Design announces VisualSim Ethernet Audio Video Bridging Library; Accelerates the design and testing of AVB-connected products and networks". www.eejournal.com. Retrieved 2016-02-03.
- ↑ "iap.ece.uprm.edu" (PDF).
- ↑ Group, Techbriefs Media. "NEXUS Scalable and Distributed Next-Generation Avionics Bus for Space Missions - Nasa Tech Briefs :: NASA Tech Briefs". www.techbriefs.com. Retrieved 2016-02-03.
- ↑ Muhammad, HudaS; Sagahyroon, Assim (2010-03-31). "Virtual Prototyping and Performance Analysis of Two Memory Architectures". EURASIP Journal on Embedded Systems 2009 (1): 984891. doi:10.1155/2009/984891. ISSN 1687-3963.
- ↑ "Success Stories - Mirabilis Design Inc.". Mirabilis Design Inc. Retrieved 2016-02-03.
- ↑ "Xilinx partners provide a wide spectrum of system-level design solutions" (PDF).
- ↑ "VisualSim reset for macroarchitecture | EE Times". EETimes. Retrieved 2016-02-03.