Tensor derivative (continuum mechanics)
The derivatives of scalars, vectors, and second-order tensors with respect to second-order tensors are of considerable use in continuum mechanics. These derivatives are used in the theories of nonlinear elasticity and plasticity, particularly in the design of algorithms for numerical simulations.[1]
The directional derivative provides a systematic way of finding these derivatives.[2]
Derivatives with respect to vectors and second-order tensors
The definitions of directional derivatives for various situations are given below. It is assumed that the functions are sufficiently smooth that derivatives can be taken.
Derivatives of scalar valued functions of vectors
Let f(v) be a real valued function of the vector v. Then the derivative of f(v) with respect to v (or at v) in the direction u is the vector defined as
![\frac{\partial f}{\partial \mathbf{v}}\cdot\mathbf{u} = Df(\mathbf{v})[\mathbf{u}] = \left[\frac{d }{d \alpha}~f(\mathbf{v} + \alpha~\mathbf{u})\right]_{\alpha = 0}](../I/m/eb463fc48503030f92e2a19717fcf271.png)
for all vectors u.
Properties:
1) If  then
then 
2) If  then
then 
3) If  then
then 
Derivatives of vector valued functions of vectors
Let f(v) be a vector valued function of the vector v. Then the derivative of f(v) with respect to v (or at v) in the direction u is the second order tensor defined as
![\frac{\partial \mathbf{f}}{\partial \mathbf{v}}\cdot\mathbf{u} = D\mathbf{f}(\mathbf{v})[\mathbf{u}] = \left[\frac{d }{d \alpha}~\mathbf{f}(\mathbf{v} + \alpha~\mathbf{u} ) \right]_{\alpha = 0}](../I/m/e3b1106403d14044ef3ec71ef56c1d5e.png)
for all vectors u.
- Properties:
- 1) If
 then
then 
- 2) If
 then
then 
- 3) If
 then
then 
Derivatives of scalar valued functions of second-order tensors
Let  be a real valued function of the second order tensor
be a real valued function of the second order tensor  . Then the derivative of with respect to (or at ) in the direction
. Then the derivative of with respect to (or at ) in the direction  is the second order tensor defined as
is the second order tensor defined as
![\frac{\partial f}{\partial \boldsymbol{S}}:\boldsymbol{T} = Df(\boldsymbol{S})[\boldsymbol{T}] = \left[\frac{d }{d \alpha}~f(\boldsymbol{S} + \alpha~\boldsymbol{T})\right]_{\alpha = 0}](../I/m/301e4c30722d29c160fd62f552c72162.png)
for all second order tensors .
- Properties:
- 1) If
 then
then 
- 2) If
 then
then 
- 3) If
 then
then 
Derivatives of tensor valued functions of second-order tensors
Let  be a second order tensor valued function of the second order tensor . Then the derivative of with respect to (or at ) in the direction is the fourth order tensor defined as
be a second order tensor valued function of the second order tensor . Then the derivative of with respect to (or at ) in the direction is the fourth order tensor defined as
![\frac{\partial \boldsymbol{F}}{\partial \boldsymbol{S}}:\boldsymbol{T} = D\boldsymbol{F}(\boldsymbol{S})[\boldsymbol{T}] = \left[\frac{d }{d \alpha}~\boldsymbol{F}(\boldsymbol{S} + \alpha~\boldsymbol{T})\right]_{\alpha = 0}](../I/m/f48a2042233fe78b410af72e4de27b5b.png)
for all second order tensors .
- Properties:
- 1) If
 then
then 
- 2) If
 then
then 
- 3) If
 then
then 
- 4) If
 then
then 
Gradient of a tensor field
The gradient,  , of a tensor field
, of a tensor field  in the direction of an arbitrary constant vector c is defined as:
in the direction of an arbitrary constant vector c is defined as:

The gradient of a tensor field of order n is a tensor field of order n+1.
Cartesian coordinates
- Note: the Einstein summation convention of summing on repeated indices is used below.
If  are the basis vectors in a Cartesian coordinate system, with coordinates of points denoted by (
are the basis vectors in a Cartesian coordinate system, with coordinates of points denoted by ( ), then the gradient of the tensor field is given by
), then the gradient of the tensor field is given by
Proof The vectors x and c can be written as
 and
and  . Let y := x + αc. In that case the gradient is given by
. Let y := x + αc. In that case the gradient is given by
![\begin{align}
\boldsymbol{\nabla}\boldsymbol{T}\cdot\mathbf{c} & = \left.\cfrac{d}{d\alpha}~\boldsymbol{T}(x_1+\alpha c_1, x_2 + \alpha c_2, x_3 + \alpha c_3)\right|_{\alpha=0} \equiv \left.\cfrac{d}{d\alpha}~\boldsymbol{T}(y_1, y_2, y_3)\right|_{\alpha=0} \\
& = \left [\cfrac{\partial{\boldsymbol{T}}}{\partial y_1}~\cfrac{\partial y_1}{\partial \alpha} + \cfrac{\partial{\boldsymbol{T}}}{\partial y_2}~\cfrac{\partial y_2}{\partial \alpha} +
\cfrac{\partial{\boldsymbol{T}}}{\partial y_3}~\cfrac{\partial y_3}{\partial \alpha} \right]_{\alpha=0} =
\left [\cfrac{\partial{\boldsymbol{T}}}{\partial y_1}~c_1 + \cfrac{\partial{\boldsymbol{T}}}{\partial y_2}~c_2 +
\cfrac{\partial{\boldsymbol{T}}}{\partial y_3}~c_3 \right]_{\alpha=0} \\
& = \cfrac{\partial{\boldsymbol{T}}}{\partial x_1}~c_1 + \cfrac{\partial{\boldsymbol{T}}}{\partial x_2}~c_2 +
\cfrac{\partial{\boldsymbol{T}}}{\partial x_3}~c_3 \equiv \cfrac{\partial{\boldsymbol{T}}}{\partial x_i}~c_i = \cfrac{\partial{\boldsymbol{T}}}{\partial x_i}~(\mathbf{e}_i\cdot\mathbf{c})
= \left[\mathbf{e}_i\otimes\cfrac{\partial{\boldsymbol{T}}}{\partial x_i}\right]\cdot\mathbf{c} \qquad \square
\end{align}](../I/m/1c7882514b21c5bad04e8841e1f1f2dd.png)
Since the basis vectors do not vary in a Cartesian coordinate system we have the following relations for the gradients of a scalar field  , a vector field v, and a second-order tensor field .
, a vector field v, and a second-order tensor field .
Curvilinear coordinates
- Note: the Einstein summation convention of summing on repeated indices is used below.
If  are the contravariant basis vectors in a curvilinear coordinate system, with coordinates of points denoted by (
are the contravariant basis vectors in a curvilinear coordinate system, with coordinates of points denoted by ( ), then the gradient of the tensor field is given by (see [3] for a proof.)
), then the gradient of the tensor field is given by (see [3] for a proof.)
From this definition we have the following relations for the gradients of a scalar field , a vector field v, and a second-order tensor field .
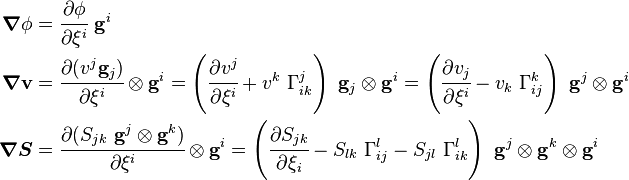
where the Christoffel symbol  is defined using
is defined using

Cylindrical polar coordinates
In cylindrical coordinates, the gradient is given by
![\begin{align}
\boldsymbol{\nabla}\phi &=\cfrac{\partial \phi}{\partial r}~\mathbf{e}_r + \cfrac{1}{r}~\cfrac{\partial \phi}{\partial \theta}~\mathbf{e}_\theta +\cfrac{\partial \phi}{\partial z}~\mathbf{e}_z \\
\boldsymbol{\nabla}\mathbf{v} &= \cfrac{\partial v_r}{\partial r}~\mathbf{e}_r\otimes\mathbf{e}_r + \cfrac{1}{r}\left(\cfrac{\partial v_r}{\partial \theta} -v_\theta \right)~\mathbf{e}_r \otimes \mathbf{e}_\theta + \cfrac{\partial v_r}{\partial z}~\mathbf{e}_r\otimes\mathbf{e}_z +\cfrac{\partial v_\theta}{\partial r}~\mathbf{e}_\theta\otimes\mathbf{e}_r +\cfrac{1}{r}\left(\cfrac{\partial v_\theta}{\partial \theta} + v_r \right)~\mathbf{e}_\theta\otimes\mathbf{e}_\theta \\
&\quad + \cfrac{\partial v_\theta}{\partial z}~\mathbf{e}_\theta \otimes\mathbf{e}_z + \cfrac{\partial v_z}{\partial r}~\mathbf{e}_z\otimes\mathbf{e}_r + \cfrac{1}{r}\cfrac{\partial v_z}{\partial \theta}~\mathbf{e}_z \otimes\mathbf{e}_\theta + \cfrac{\partial v_z}{\partial z}~\mathbf{e}_z\otimes\mathbf{e}_z \\
\boldsymbol{\nabla}\boldsymbol{S} & = \frac{\partial S_{rr}}{\partial r}~\mathbf{e}_r\otimes\mathbf{e}_r\otimes\mathbf{e}_r + \cfrac{1}{r}\left[\frac{\partial S_{rr}}{\partial \theta} - (S_{\theta r}+S_{r\theta})\right]~\mathbf{e}_r\otimes\mathbf{e}_r\otimes\mathbf{e}_\theta + \frac{\partial S_{rr}}{\partial z}~\mathbf{e}_r \otimes \mathbf{e}_r\otimes\mathbf{e}_z + \frac{\partial S_{r\theta}}{\partial r}~\mathbf{e}_r\otimes\mathbf{e}_\theta\otimes\mathbf{e}_r \\
&\quad+ \cfrac{1}{r}\left[\frac{\partial S_{r\theta}}{\partial \theta} + (S_{rr}-S_{\theta\theta}) \right]~\mathbf{e}_r\otimes\mathbf{e}_\theta\otimes\mathbf{e}_\theta + \frac{\partial S_{r\theta}}{\partial z}~\mathbf{e}_r\otimes\mathbf{e}_\theta\otimes\mathbf{e}_z + \frac{\partial S_{rz}}{\partial r}~\mathbf{e}_r \otimes \mathbf{e}_z \otimes \mathbf{e}_r + \cfrac{1}{r}\left[\frac{\partial S_{rz}}{\partial \theta} -S_{\theta z} \right]~\mathbf{e}_r\otimes\mathbf{e}_z\otimes\mathbf{e}_\theta \\
&\quad+ \frac{\partial S_{rz}}{\partial z}~\mathbf{e}_r \otimes \mathbf{e}_z\otimes\mathbf{e}_z + \frac{\partial S_{\theta r}}{\partial r}~\mathbf{e}_\theta \otimes \mathbf{e}_r \otimes \mathbf{e}_r + \cfrac{1}{r}\left[\frac{\partial S_{\theta r}}{\partial \theta} + (S_{rr}-S_{\theta\theta}) \right]~\mathbf{e}_\theta\otimes\mathbf{e}_r\otimes\mathbf{e}_\theta + \frac{\partial S_{\theta r}}{\partial z}~\mathbf{e}_\theta\otimes\mathbf{e}_r\otimes\mathbf{e}_z \\
&\quad+ \frac{\partial S_{\theta\theta}}{\partial r}~\mathbf{e}_\theta\otimes\mathbf{e}_\theta\otimes\mathbf{e}_r +\cfrac{1}{r}\left[\frac{\partial S_{\theta\theta}}{\partial \theta} + (S_{r\theta}+S_{\theta r})\right]~\mathbf{e}_\theta\otimes\mathbf{e}_\theta\otimes\mathbf{e}_\theta + \frac{\partial S_{\theta\theta}}{\partial z}~\mathbf{e}_\theta \otimes \mathbf{e}_\theta \otimes \mathbf{e}_z + \frac{\partial S_{\theta z}}{\partial r}~\mathbf{e}_\theta \otimes \mathbf{e}_z\otimes\mathbf{e}_r \\
&\quad+ \cfrac{1}{r}\left[\frac{\partial S_{\theta z}}{\partial \theta} + S_{rz} \right]~\mathbf{e}_\theta \otimes\mathbf{e}_z\otimes\mathbf{e}_\theta + \frac{\partial S_{\theta z}}{\partial z}~\mathbf{e}_\theta\otimes\mathbf{e}_z\otimes\mathbf{e}_z + \frac{\partial S_{zr}}{\partial r}~\mathbf{e}_z\otimes\mathbf{e}_r\otimes\mathbf{e}_r + \cfrac{1}{r}\left[\frac{\partial S_{zr}}{\partial \theta} - S_{z\theta} \right]~\mathbf{e}_z \otimes \mathbf{e}_r \otimes\mathbf{e}_\theta \\
&\quad+ \frac{\partial S_{zr}}{\partial z}~\mathbf{e}_z\otimes\mathbf{e}_r\otimes\mathbf{e}_z + \frac{\partial S_{z\theta}}{\partial r}~\mathbf{e}_z \otimes \mathbf{e}_\theta \otimes \mathbf{e}_r + \cfrac{1}{r}\left[\frac{\partial S_{z\theta}}{\partial \theta} + S_{zr} \right]~\mathbf{e}_z \otimes\mathbf{e}_\theta \otimes \mathbf{e}_\theta + \frac{\partial S_{z\theta}}{\partial z}~\mathbf{e}_z\otimes\mathbf{e}_\theta\otimes\mathbf{e}_z \\
&\quad+ \frac{\partial S_{zz}}{\partial r}~\mathbf{e}_z\otimes\mathbf{e}_z\otimes\mathbf{e}_r + \cfrac{1}{r}~\frac{\partial S_{zz}}{\partial \theta }~\mathbf{e}_z \otimes \mathbf{e}_z \otimes\mathbf{e}_\theta + \frac{\partial S_{zz}}{\partial z}~\mathbf{e}_z\otimes\mathbf{e}_z\otimes\mathbf{e}_z
\end{align}](../I/m/40f29c56e66a57d8eccfa1b0989a06bd.png)
Divergence of a tensor field
The divergence of a tensor field is defined using the recursive relation

where c is an arbitrary constant vector and v is a vector field. If is a tensor field of order n > 1 then the divergence of the field is a tensor of order n−1.
Cartesian coordinates
- Note: the Einstein summation convention of summing on repeated indices is used below.
In a Cartesian coordinate system we have the following relations for a vector field v and a second-order tensor field .
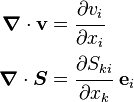
Note that last relation can be found in reference [4] under relation (1.14.13). Note also that according to the same paper in the case of the second-order tensor field, we have:

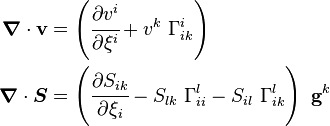
Curvilinear coordinates
- Note: the Einstein summation convention of summing on repeated indices is used below.
In curvilinear coordinates, the divergences of a vector field v and a second-order tensor field are
Cylindrical polar coordinates
In cylindrical polar coordinates
![\begin{align}
\boldsymbol{\nabla}\cdot\mathbf{v} &
= \cfrac{\partial v_r}{\partial r} +
\cfrac{1}{r}\left(\cfrac{\partial v_\theta}{\partial \theta} + v_r \right)
+ \cfrac{\partial v_z}{\partial z}\\
\boldsymbol{\nabla}\cdot\boldsymbol{S} &
= \frac{\partial S_{rr}}{\partial r}~\mathbf{e}_r
+ \frac{\partial S_{r\theta}}{\partial r}~\mathbf{e}_\theta
+ \frac{\partial S_{rz}}{\partial r}~\mathbf{e}_z \\
& +
\cfrac{1}{r}\left[\frac{\partial S_{\theta r}}{\partial \theta} + (S_{rr}-S_{\theta\theta})\right]~\mathbf{e}_r +
\cfrac{1}{r}\left[\frac{\partial S_{\theta\theta}}{\partial \theta} + (S_{r\theta}+S_{\theta r})\right]~\mathbf{e}_\theta +\cfrac{1}{r}\left[\frac{\partial S_{\theta z}}{\partial \theta} + S_{rz}\right]~\mathbf{e}_z \\
& +
\frac{\partial S_{zr}}{\partial z}~\mathbf{e}_r +
\frac{\partial S_{z\theta}}{\partial z}~\mathbf{e}_\theta +
\frac{\partial S_{zz}}{\partial z}~\mathbf{e}_z
\end{align}](../I/m/83beb9260e523fae665f7817e0b16d42.png)
Curl of a tensor field
The curl of an order-n > 1 tensor field is also defined using the recursive relation

where c is an arbitrary constant vector and v is a vector field.
Curl of a first-order tensor (vector) field
Consider a vector field v and an arbitrary constant vector c. In index notation, the cross product is given by

where  is the permutation symbol. Then,
is the permutation symbol. Then,

Therefore

Curl of a second-order tensor field
For a second-order tensor

Hence, using the definition of the curl of a first-order tensor field,

Therefore, we have

Identities involving the curl of a tensor field
The most commonly used identity involving the curl of a tensor field, , is

This identity hold for tensor fields of all orders. For the important case of a second-order tensor, , this identity implies that

Derivative of the determinant of a second-order tensor
The derivative of the determinant of a second order tensor  is given by
is given by
![\frac{\partial }{\partial \boldsymbol{A}}\det(\boldsymbol{A}) = \det(\boldsymbol{A})~[\boldsymbol{A}^{-1}]^T ~.](../I/m/388dc10a74be0c3a8cb93c6e1ea20661.png)
In an orthonormal basis, the components of can be written as a matrix A. In that case, the right hand side corresponds the cofactors of the matrix.
Proof Let
be a second order tensor and let  . Then, from the definition of the derivative of a scalar valued function of a tensor, we have
. Then, from the definition of the derivative of a scalar valued function of a tensor, we haveRecall that we can expand the determinant of a tensor in the form of a characteristic equation in terms of the invariants
 using (note the sign of λ)
using (note the sign of λ)Using this expansion we can write
Recall that the invariant
 is given by
is given byHence,
Invoking the arbitrariness of
we then have
![\begin{align}
\frac{\partial f}{\partial \boldsymbol{A}}:\boldsymbol{T} & = \left.\cfrac{d}{d\alpha} \det(\boldsymbol{A} + \alpha~\boldsymbol{T}) \right|_{\alpha=0} \\
& = \left.\cfrac{d}{d\alpha} \det\left[\alpha~\boldsymbol{A}\left(\cfrac{1}{\alpha}~\boldsymbol{\mathit{I}} + \boldsymbol{A}^{-1}\cdot\boldsymbol{T}\right) \right] \right|_{\alpha=0} \\
& = \left.\cfrac{d}{d\alpha} \left[\alpha^3~\det(\boldsymbol{A})~\det\left(\cfrac{1}{\alpha}~\boldsymbol{\mathit{I}} + \boldsymbol{A}^{-1} \cdot \boldsymbol{T}\right)\right]\right|_{\alpha=0}.
\end{align}](../I/m/d49f590a9b20bdb78de6312637e25440.png)

![\begin{align}
\frac{\partial f}{\partial \boldsymbol{A}}:\boldsymbol{T}
& = \left.\cfrac{d}{d\alpha} \left[\alpha^3~\det(\boldsymbol{A})~
\left(\cfrac{1}{\alpha^3} + I_1(\boldsymbol{A}^{-1}\cdot\boldsymbol{T})~\cfrac{1}{\alpha^2} +
I_2(\boldsymbol{A}^{-1}\cdot\boldsymbol{T})~\cfrac{1}{\alpha} + I_3(\boldsymbol{A}^{-1}\cdot\boldsymbol{T})\right)
\right] \right|_{\alpha=0} \\
& = \left.\det(\boldsymbol{A})~\cfrac{d}{d\alpha} \left[
1 + I_1(\boldsymbol{A}^{-1}\cdot\boldsymbol{T})~\alpha +
I_2(\boldsymbol{A}^{-1}\cdot\boldsymbol{T})~\alpha^2 + I_3(\boldsymbol{A}^{-1}\cdot\boldsymbol{T})~\alpha^3
\right] \right|_{\alpha=0} \\
& = \left.\det(\boldsymbol{A})~\left[I_1(\boldsymbol{A}^{-1}\cdot\boldsymbol{T}) +
2~I_2(\boldsymbol{A}^{-1}\cdot\boldsymbol{T})~\alpha + 3~I_3(\boldsymbol{A}^{-1}\cdot\boldsymbol{T})~\alpha^2
\right] \right|_{\alpha=0} \\
& = \det(\boldsymbol{A})~I_1(\boldsymbol{A}^{-1}\cdot\boldsymbol{T}) ~.
\end{align}](../I/m/7f31e3d92a4861d3e8592cf9b79f25c4.png)

![\frac{\partial f}{\partial \boldsymbol{A}}:\boldsymbol{T} = \det(\boldsymbol{A})~\text{tr}(\boldsymbol{A}^{-1}\cdot\boldsymbol{T})= \det(\boldsymbol{A})~[\boldsymbol{A}^{-1}]^T : \boldsymbol{T}.](../I/m/61a8ca769f9fbfda2aabfdbf07bc0a3b.png)
![\frac{\partial f}{\partial \boldsymbol{A}} = \det(\boldsymbol{A})~[\boldsymbol{A}^{-1}]^T ~.](../I/m/2f7e0ee3edd0598e34322e34630272b6.png)
Derivatives of the invariants of a second-order tensor
The principal invariants of a second order tensor are
![\begin{align}
I_1(\boldsymbol{A}) & = \text{tr}{\boldsymbol{A}} \\
I_2(\boldsymbol{A}) & = \frac{1}{2} \left[ (\text{tr}{\boldsymbol{A}})^2 - \text{tr}{\boldsymbol{A}^2} \right] \\
I_3(\boldsymbol{A}) & = \det(\boldsymbol{A})
\end{align}](../I/m/f77d412e4977c723a2f483f734d1f673.png)
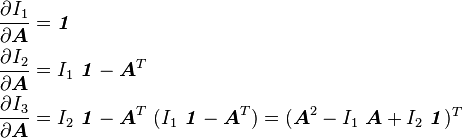
The derivatives of these three invariants with respect to are
![\begin{align}
\frac{\partial I_1}{\partial \boldsymbol{A}} & = \boldsymbol{\mathit{1}} \\
\frac{\partial I_2}{\partial \boldsymbol{A}} & = I_1~\boldsymbol{\mathit{1}} - \boldsymbol{A}^T \\
\frac{\partial I_3}{\partial \boldsymbol{A}} & = \det(\boldsymbol{A})~[\boldsymbol{A}^{-1}]^T
= I_2~\boldsymbol{\mathit{1}} - \boldsymbol{A}^T~(I_1~\boldsymbol{\mathit{1}} - \boldsymbol{A}^T)
= (\boldsymbol{A}^2 - I_1~\boldsymbol{A} + I_2~\boldsymbol{\mathit{1}})^T
\end{align}](../I/m/00e1300ec05d7463f46e75b35bb3a8f0.png)
Proof From the derivative of the determinant we know that For the derivatives of the other two invariants, let us go back to the characteristic equation
Using the same approach as for the determinant of a tensor, we can show that
Now the left hand side can be expanded as
Hence
or,
Expanding the right hand side and separating terms on the left hand side gives
or,
If we define
 and
and  , we can write the above as
, we can write the above asCollecting terms containing various powers of λ, we get
Then, invoking the arbitrariness of λ, we have
This implies that
![\frac{\partial I_3}{\partial \boldsymbol{A}} = \det(\boldsymbol{A})~[\boldsymbol{A}^{-1}]^T ~.](../I/m/9ae06d0eb9e59c6da04e332bc5bfe178.png)

![\frac{\partial }{\partial \boldsymbol{A}}\det(\lambda~\boldsymbol{\mathit{1}} + \boldsymbol{A}) =
\det(\lambda~\boldsymbol{\mathit{1}} + \boldsymbol{A})~[(\lambda~\boldsymbol{\mathit{1}}+\boldsymbol{A})^{-1}]^T ~.](../I/m/d01e8a7c8603447f3843a6b580ca2e34.png)
![\begin{align}
\frac{\partial }{\partial \boldsymbol{A}}\det(\lambda~\boldsymbol{\mathit{1}} + \boldsymbol{A}) & =
\frac{\partial }{\partial \boldsymbol{A}}\left[
\lambda^3 + I_1(\boldsymbol{A})~\lambda^2 + I_2(\boldsymbol{A})~\lambda + I_3(\boldsymbol{A}) \right] \\
& =
\frac{\partial I_1}{\partial \boldsymbol{A}}~\lambda^2 + \frac{\partial I_2}{\partial \boldsymbol{A}}~\lambda +
\frac{\partial I_3}{\partial \boldsymbol{A}}~.
\end{align}](../I/m/7dacdc0c1310bcc7f3935a978c120ebc.png)
![\frac{\partial I_1}{\partial \boldsymbol{A}}~\lambda^2 + \frac{\partial I_2}{\partial \boldsymbol{A}}~\lambda +
\frac{\partial I_3}{\partial \boldsymbol{A}} =
\det(\lambda~\boldsymbol{\mathit{1}} + \boldsymbol{A})~[(\lambda~\boldsymbol{\mathit{1}}+\boldsymbol{A})^{-1}]^T](../I/m/2d6fc66a3bd521bf023aed6414e0d387.png)
![(\lambda~\boldsymbol{\mathit{1}}+\boldsymbol{A})^T\cdot\left[
\frac{\partial I_1}{\partial \boldsymbol{A}}~\lambda^2 + \frac{\partial I_2}{\partial \boldsymbol{A}}~\lambda +
\frac{\partial I_3}{\partial \boldsymbol{A}}\right] =
\det(\lambda~\boldsymbol{\mathit{1}} + \boldsymbol{A})~\boldsymbol{\mathit{1}} ~.](../I/m/d3c98ee96a3a8a952eec91120a23e289.png)
![(\lambda~\boldsymbol{\mathit{1}} +\boldsymbol{A}^T)\cdot\left[
\frac{\partial I_1}{\partial \boldsymbol{A}}~\lambda^2 + \frac{\partial I_2}{\partial \boldsymbol{A}}~\lambda +
\frac{\partial I_3}{\partial \boldsymbol{A}}\right] =
\left[\lambda^3 + I_1~\lambda^2 + I_2~\lambda + I_3\right]
\boldsymbol{\mathit{1}}](../I/m/c0fcb3a6f568caab09717b59ad5d3588.png)
![\begin{align}
\left[\frac{\partial I_1}{\partial \boldsymbol{A}}~\lambda^3 \right.&
\left.+ \frac{\partial I_2}{\partial \boldsymbol{A}}~\lambda^2 +
\frac{\partial I_3}{\partial \boldsymbol{A}}~\lambda\right]\boldsymbol{\mathit{1}} +
\boldsymbol{A}^T\cdot\frac{\partial I_1}{\partial \boldsymbol{A}}~\lambda^2 +
\boldsymbol{A}^T\cdot\frac{\partial I_2}{\partial \boldsymbol{A}}~\lambda +
\boldsymbol{A}^T\cdot\frac{\partial I_3}{\partial \boldsymbol{A}} \\
& =
\left[\lambda^3 + I_1~\lambda^2 + I_2~\lambda + I_3\right]
\boldsymbol{\mathit{1}} ~.
\end{align}](../I/m/3e67aa96282a5dd15b16bf99cc073f4f.png)
![\begin{align}
\left[\frac{\partial I_1}{\partial \boldsymbol{A}}~\lambda^3 \right.&
\left.+ \frac{\partial I_2}{\partial \boldsymbol{A}}~\lambda^2 +
\frac{\partial I_3}{\partial \boldsymbol{A}}~\lambda + \frac{\partial I_4}{\partial \boldsymbol{A}}\right]\boldsymbol{\mathit{1}} +
\boldsymbol{A}^T\cdot\frac{\partial I_0}{\partial \boldsymbol{A}}~\lambda^3 +
\boldsymbol{A}^T\cdot\frac{\partial I_1}{\partial \boldsymbol{A}}~\lambda^2 +
\boldsymbol{A}^T\cdot\frac{\partial I_2}{\partial \boldsymbol{A}}~\lambda +
\boldsymbol{A}^T\cdot\frac{\partial I_3}{\partial \boldsymbol{A}} \\
&=
\left[I_0~\lambda^3 + I_1~\lambda^2 + I_2~\lambda + I_3\right]
\boldsymbol{\mathit{1}} ~.
\end{align}](../I/m/8ce6b3400ae926be35b5957de3be6d01.png)

Derivative of the second-order identity tensor
Let  be the second order identity tensor. Then the derivative of this tensor with respect to a second order tensor is given by
be the second order identity tensor. Then the derivative of this tensor with respect to a second order tensor is given by
This is because is independent of .
Derivative of a second-order tensor with respect to itself
Let be a second order tensor. Then
![\frac{\partial \boldsymbol{A}}{\partial \boldsymbol{A}}:\boldsymbol{T} = \left[\frac{\partial }{\partial \alpha} (\boldsymbol{A} + \alpha~\boldsymbol{T})\right]_{\alpha = 0} = \boldsymbol{T} = \boldsymbol{\mathsf{I}}:\boldsymbol{T}](../I/m/952a2c48344aada7948136a9246f697c.png)
Therefore,

Here  is the fourth order identity tensor. In index
notation with respect to an orthonormal basis
is the fourth order identity tensor. In index
notation with respect to an orthonormal basis

This result implies that
where

Therefore, if the tensor is symmetric, then the derivative is also symmetric and
we get
where the symmetric fourth order identity tensor is

Derivative of the inverse of a second-order tensor
Let and be two second order tensors, then

In index notation with respect to an orthonormal basis

We also have

In index notation

If the tensor is symmetric then

Proof Recall that Since
 , we can write
, we can writeUsing the product rule for second order tensors
we get
or,
Therefore,
![\frac{\partial }{\partial \boldsymbol{S}}[\boldsymbol{F}_1(\boldsymbol{S})\cdot\boldsymbol{F}_2(\boldsymbol{S})]:\boldsymbol{T} =
\left(\frac{\partial \boldsymbol{F}_1}{\partial \boldsymbol{S}}:\boldsymbol{T}\right)\cdot\boldsymbol{F}_2 +
\boldsymbol{F}_1\cdot\left(\frac{\partial \boldsymbol{F}_2}{\partial \boldsymbol{S}}:\boldsymbol{T}\right)](../I/m/96bb99e98d6719745485b79b63d25198.png)

Integration by parts
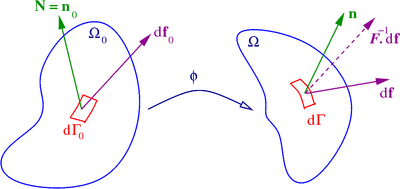
 , its boundary
, its boundary  and the outward unit normal
and the outward unit normal 
Another important operation related to tensor derivatives in continuum mechanics is integration by parts. The formula for integration by parts can be written as

where  and
and  are differentiable tensor fields of arbitrary order, is the unit outward normal to the domain over which the tensor fields are defined,
are differentiable tensor fields of arbitrary order, is the unit outward normal to the domain over which the tensor fields are defined,  represents a generalized tensor product operator, and
represents a generalized tensor product operator, and  is a generalized gradient operator. When is equal to the identity tensor, we get the divergence theorem
is a generalized gradient operator. When is equal to the identity tensor, we get the divergence theorem
We can express the formula for integration by parts in Cartesian index notation as

For the special case where the tensor product operation is a contraction of one index and the gradient operation is a divergence, and both and are second order tensors, we have

In index notation,

References
- ↑ J. C. Simo and T. J. R. Hughes, 1998, Computational Inelasticity, Springer
- ↑ J. E. Marsden and T. J. R. Hughes, 2000, Mathematical Foundations of Elasticity, Dover.
- ↑ Ogden, R. W., 2000, Nonlinear Elastic Deformations, Dover.
- ↑ http://homepages.engineering.auckland.ac.nz/~pkel015/SolidMechanicsBooks/Part_III/Chapter_1_Vectors_Tensors/Vectors_Tensors_14_Tensor_Calculus.pdf