Skew-symmetric matrix
In mathematics, and in particular linear algebra, a skew-symmetric (or antisymmetric or antimetric[1]) matrix is a square matrix whose transpose is also its negative; that is, it satisfies the condition -A = AT. If the entry in the i th row and j th column is aij, i.e. A = (aij) then the skew symmetric condition is aij = −aji. For example, the following matrix is skew-symmetric:

Properties
We assume that the underlying field is not of characteristic 2: that is, that 1 + 1 ≠ 0 where 1 denotes the multiplicative identity and 0 the additive identity of the given field. Otherwise, a skew-symmetric matrix is just the same thing as a symmetric matrix.
Sums and scalar multiples of skew-symmetric matrices are again skew-symmetric. Hence, the skew-symmetric matrices form a vector space. Its dimension is n(n−1)/2.
Let Matn denote the space of n × n matrices. A skew-symmetric matrix is determined by n(n − 1)/2 scalars (the number of entries above the main diagonal); a symmetric matrix is determined by n(n + 1)/2 scalars (the number of entries on or above the main diagonal). Let Skewn denote the space of n × n skew-symmetric matrices and Symn denote the space of n × n symmetric matrices. If A ∈ Matn then

Notice that ½(A − AT) ∈ Skewn and ½(A + AT) ∈ Symn. This is true for every square matrix A with entries from any field whose characteristic is different from 2. Then, since Matn = Skewn + Symn and Skewn ∩ Symn = {0},

where ⊕ denotes the direct sum.
Denote with  the standard inner product on Rn. The real n-by-n matrix A is skew-symmetric if and only if
the standard inner product on Rn. The real n-by-n matrix A is skew-symmetric if and only if

This is also equivalent to  for all x (one implication being obvious, the other a plain consequence of
for all x (one implication being obvious, the other a plain consequence of  for all x and y).
Since this definition is independent of the choice of basis, skew-symmetry is a property that depends only on the linear operator A and a choice of inner product.
for all x and y).
Since this definition is independent of the choice of basis, skew-symmetry is a property that depends only on the linear operator A and a choice of inner product.
All main diagonal entries of a skew-symmetric matrix must be zero, so the trace is zero. If A = (aij) is skew-symmetric, aij = −aji; hence aii = 0.
3x3 skew symmetric matrices can be used to represent cross products as matrix multiplications.
Determinant
Let A be a n×n skew-symmetric matrix. The determinant of A satisfies
- det(A) = det(AT) = det(−A) = (−1)ndet(A).
In particular, if n is odd, and since the underlying field is not of characteristic 2, the determinant vanishes. This result is called Jacobi's theorem, after Carl Gustav Jacobi (Eves, 1980).
The even-dimensional case is more interesting. It turns out that the determinant of A for n even can be written as the square of a polynomial in the entries of A, which was first proved by Cayley:[2]
- det(A) = Pf(A)2.
This polynomial is called the Pfaffian of A and is denoted Pf(A). Thus the determinant of a real skew-symmetric matrix is always non-negative. However this last fact can be proved in an elementary way as follows: the eigenvalues of a real skew-symmetric matrix are purely imaginary (see below) and to every eigenvalue there corresponds the conjugate eigenvalue with the same multiplicity; therefore, as the determinant is the product of the eigenvalues, each one repeated according to its multiplicity, it follows at once that the determinant, if it is not 0, is a positive real number.
The number of distinct terms s(n) in the expansion of the determinant of a skew-symmetric matrix of order n has been considered already by Cayley, Sylvester, and Pfaff. Due to cancellations, this number is quite small as compared the number of terms of a generic matrix of order n, which is n!. The sequence s(n) (sequence A002370 in OEIS) is
- 1, 0, 1, 0, 6, 0, 120, 0, 5250, 0, 395010, 0, …
and it is encoded in the exponential generating function

The latter yields to the asymptotics (for n even)

The number of positive and negative terms are approximatively a half of the total, although their difference takes larger and larger positive and negative values as n increases (sequence A167029 in OEIS).
Cross product
3x3 skew symmetric matrices can be used to represent cross products as matrix multiplications. Consider vectors  and
and  . Then, defining matrix:
. Then, defining matrix:
![[\mathbf{a}]_{\times} =
\begin{bmatrix}
\,\,0&\!-a_3&\,\,\,a_2\\
\,\,\,a_3&0&\!-a_1\\
\!-a_2&\,\,a_1&\,\,0
\end{bmatrix}](../I/m/b88588e03096c414a0896ac94d6f42ee.png)
the cross product can be written as:
-
![\mathbf{a}\times\mathbf{b}=[\mathbf{a}]_{\times}\mathbf{b}](../I/m/737002f04a4b770329ac4ca8de6e94ea.png) .
.
This can be immediately verified by computing both sides of the previous equation and comparing each corresponding element of the results. See also: Plücker matrix
Spectral theory
Since a matrix is similar to its own transpose, they must have the same eigenvalues. It follows that the eigenvalues of a skew-symmetric matrix always come in pairs ±λ (except in the odd-dimensional case where there is an additional unpaired 0 eigenvalue). From the spectral theorem, for a real skew-symmetric matrix the nonzero eigenvalues are all pure imaginary and thus are of the form iλ1, −iλ1, iλ2, −iλ2, … where each of the λk are real.
Real skew-symmetric matrices are normal matrices (they commute with their adjoints) and are thus subject to the spectral theorem, which states that any real skew-symmetric matrix can be diagonalized by a unitary matrix. Since the eigenvalues of a real skew-symmetric matrix are imaginary, it is not possible to diagonalize one by a real matrix. However, it is possible to bring every skew-symmetric matrix to a block diagonal form by a special orthogonal transformation.[3] Specifically, every 2n × 2n real skew-symmetric matrix can be written in the form A = Q Σ QT where Q is orthogonal and
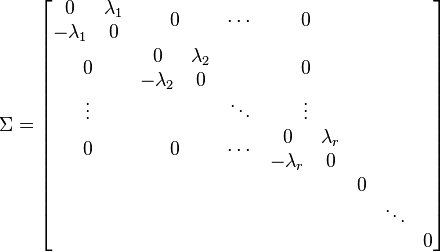
for real λk. The nonzero eigenvalues of this matrix are ±iλk. In the odd-dimensional case Σ always has at least one row and column of zeros.
More generally, every complex skew-symmetric matrix can be written in the form A = U Σ UT where U is unitary and Σ has the block-diagonal form given above with complex λk. This is an example of the Youla decomposition of a complex square matrix.[4]
Skew-symmetric and alternating forms
A skew-symmetric form φ on a vector space V over a field K of arbitrary characteristic is defined to be a bilinear form
- φ : V × V → K
such that for all v, w in V,
- φ(v, w) = −φ(w, v).
This defines a form with desirable properties for vector spaces over fields of characteristic not equal to 2, but in a vector space over a field of characteristic 2, the definition is equivalent to that of a symmetric form, as every element is its own additive inverse.
Where the vector space V is over a field of arbitrary characteristic including characteristic 2, we may define an alternating form as a bilinear form φ such that for all vectors v in V
- φ(v, v) = 0.
This is equivalent to a skew-symmetric form when the field is not of characteristic 2 as seen from
- 0 = φ(v + w, v + w) = φ(v, v) + φ(v, w) + φ(w, v) + φ(w, w) = φ(v, w) + φ(w, v),
whence,
- φ(v, w) = −φ(w, v).
A bilinear form φ will be represented by a matrix A such that φ(v, w) = vTAw, once a basis of V is chosen, and conversely an n × n matrix A on Kn gives rise to a form sending (v, w) to vTAw. For each of symmetric, skew-symmetric and alternating forms, the representing matrices are symmetric, skew-symmetric and alternating respectively.
Infinitesimal rotations
Skew-symmetric matrices over the field of real numbers form the tangent space to the real orthogonal group O(n) at the identity matrix; formally, the special orthogonal Lie algebra. In this sense, then, skew-symmetric matrices can be thought of as infinitesimal rotations.
Another way of saying this is that the space of skew-symmetric matrices forms the Lie algebra o(n) of the Lie group O(n). The Lie bracket on this space is given by the commutator:
![[A,B] = AB - BA.\,](../I/m/db2fa4dd66a807154591f9e8a44e3899.png)
It is easy to check that the commutator of two skew-symmetric matrices is again skew-symmetric:
![[A,B]^{\mathsf{T}} = B^{\mathsf{T}}A^{\mathsf{T}}-A^{\mathsf{T}}B^{\mathsf{T}} = BA-AB = -[A,B] \, .](../I/m/f775de7f4b917c8881f2e0c0095b8e7c.png)
The matrix exponential of a skew-symmetric matrix A is then an orthogonal matrix R:

The image of the exponential map of a Lie algebra always lies in the connected component of the Lie group that contains the identity element. In the case of the Lie group O(n), this connected component is the special orthogonal group SO(n), consisting of all orthogonal matrices with determinant 1. So R = exp(A) will have determinant +1. Moreover, since the exponential map of a connected compact Lie group is always surjective, it turns out that every orthogonal matrix with unit determinant can be written as the exponential of some skew-symmetric matrix. In the particular important case of dimension n=2, the exponential representation for an orthogonal matrix reduces to the well-known polar form of a complex number of unit modulus. Indeed, if n=2, a special orthogonal matrix has the form

with a2+b2=1. Therefore, putting a=cosθ and b=sinθ, it can be written

which corresponds exactly to the polar form cosθ + isinθ = eiθ of a complex number of unit modulus.
The exponential representation of an orthogonal matrix of order n can also be obtained starting from the fact that in dimension n any special orthogonal matrix R can be written as R = Q S QT, where Q is orthogonal and S is a block diagonal matrix with  blocks of order 2, plus one of order 1 if n is odd; since each single block of order 2 is also an orthogonal matrix, it admits an exponential form. Correspondingly, the matrix S writes as exponential of a skew-symmetric block matrix Σ of the form above, S=exp(Σ), so that R = Q exp(Σ)QT = exp(Q Σ QT), exponential of the skew-symmetric matrix Q Σ QT. Conversely, the surjectivity of the exponential map, together with the above-mentioned block-diagonalization for skew-symmetric matrices, implies the block-diagonalization for orthogonal matrices.
blocks of order 2, plus one of order 1 if n is odd; since each single block of order 2 is also an orthogonal matrix, it admits an exponential form. Correspondingly, the matrix S writes as exponential of a skew-symmetric block matrix Σ of the form above, S=exp(Σ), so that R = Q exp(Σ)QT = exp(Q Σ QT), exponential of the skew-symmetric matrix Q Σ QT. Conversely, the surjectivity of the exponential map, together with the above-mentioned block-diagonalization for skew-symmetric matrices, implies the block-diagonalization for orthogonal matrices.
Coordinate-free
More intrinsically (i.e., without using coordinates), skew-symmetric linear transformations on a vector space V with an inner product may be defined as the bivectors on the space, which are sums of simple bivectors (2-blades)  . The correspondence is given by the map
. The correspondence is given by the map  where
where  is the covector dual to the vector
is the covector dual to the vector  ; in orthonormal coordinates these are exactly the elementary skew-symmetric matrices. This characterization is used in interpreting the curl of a vector field (naturally a 2-vector) as an infinitesimal rotation or "curl", hence the name.
; in orthonormal coordinates these are exactly the elementary skew-symmetric matrices. This characterization is used in interpreting the curl of a vector field (naturally a 2-vector) as an infinitesimal rotation or "curl", hence the name.
Skew-symmetrizable matrix
An n-by-n matrix A is said to be skew-symmetrizable if there exist an invertible diagonal matrix D and skew-symmetric matrix S such that S = DA. For real n-by-n matrices, sometimes the condition for D to have positive entries is added.[5]
See also
References
- ↑ Richard A. Reyment; K. G. Jöreskog; Leslie F. Marcus (1996). Applied Factor Analysis in the Natural Sciences. Cambridge University Press. p. 68. ISBN 0-521-57556-7.
- ↑ Cayley, Arthur (1847). "Sur les determinants gauches" [On skew determinants]. Crelle's Journal 38: 93–96. Reprintend in Cayley, A. (2009). "Sur les Déterminants Gauches". The Collected Mathematical Papers 1. p. 410. doi:10.1017/CBO9780511703676.070. ISBN 978-0-511-70367-6.
- ↑ Voronov, Theodore. "Pfaffian." Concise Encyclopedia of Supersymmetry. Springer Netherlands, 2003. 298-298.
- ↑ Youla, D. C. (1961). "A normal form for a matrix under the unitary congruence group". Canad. J. Math. 13: 694–704. doi:10.4153/CJM-1961-059-8.
- ↑ Fomin, Sergey; Zelevinsky, Andrei (2001). "Cluster algebras I: Foundations". arXiv:math/0104151v1.
Further reading
- Eves, Howard (1980). Elementary Matrix Theory. Dover Publications. ISBN 978-0-486-63946-8.
- Suprunenko, D. A. (2001), "Skew-symmetric matrix", in Hazewinkel, Michiel, Encyclopedia of Mathematics, Springer, ISBN 978-1-55608-010-4
- Aitken, A. C. (1944). "On the number of distinct terms in the expansion of symmetric and skew determinants.". Edinburgh Math. Notes.
External links
- "Antisymmetric matrix". Wolfram Mathworld.
- Benner, Peter; Kressner, Daniel. "HAPACK – Software for (Skew-)Hamiltonian Eigenvalue Problems".
- Ward, R. C.; Gray, L. J. (1978). "Algorithm 530: An Algorithm for Computing the Eigensystem of Skew-Symmetric Matrices and a Class of Symmetric Matrices [F2]". ACM Transactions on Mathematical Software 4 (3): 286. doi:10.1145/355791.355799. Fortran Fortran90