Shift matrix
In mathematics, a shift matrix is a binary matrix with ones only on the superdiagonal or subdiagonal, and zeroes elsewhere. A shift matrix U with ones on the superdiagonal is an upper shift matrix. The alternative subdiagonal matrix L is unsurprisingly known as a lower shift matrix. The (i,j):th component of U and L are

where  is the Kronecker delta symbol.
is the Kronecker delta symbol.
For example, the 5×5 shift matrices are
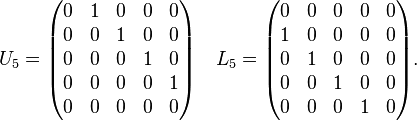
Clearly, the transpose of a lower shift matrix is an upper shift matrix and vice versa.
As a linear transformation, a lower shift matrix shifts the components of a row vector one position to the right, with a zero appearing in the first position. An upper shift matrix shifts the components of a row vector one position to the left, with a zero appearing in the last position.[1]
Premultiplying a matrix A by a lower shift matrix results in the elements of A being shifted downward by one position, with zeroes appearing in the top row. Postmultiplication by a lower shift matrix results in a shift left. Similar operations involving an upper shift matrix result in the opposite shift.
Clearly all shift matrices are nilpotent; an n by n shift matrix S becomes the null matrix when raised to the power of its dimension n.
Properties
Let L and U be the n by n lower and upper shift matrices, respectively. The following properties hold for both U and L. Let us therefore only list the properties for U:
- det(U) = 0
- trace(U) = 0
- rank(U) = n−1
- The characteristic polynomials of U is

- Un = 0. This follows from the previous property by the Cayley–Hamilton theorem.
- The permanent of U is 0.
The following properties show how U and L are related:
- LT = U; UT = L
- The null spaces of U and L are


- The spectrum of U and L is
 . The algebraic multiplicity of 0 is n, and its geometric multiplicity is 1. From the expressions for the null spaces, it follows that (up to a scaling) the only eigenvector for U is
. The algebraic multiplicity of 0 is n, and its geometric multiplicity is 1. From the expressions for the null spaces, it follows that (up to a scaling) the only eigenvector for U is  , and the only eigenvector for L is
, and the only eigenvector for L is  .
.
- For LU and UL we have


- These matrices are both idempotent, symmetric, and have the same rank as U and L
- Ln-aUn-a + LaUa = Un-aLn-a + UaLa = I (the identity matrix), for any integer a between 0 and n inclusive.
If N is any nilpotent matrix, then N is similar to a block diagonal matrix of the form
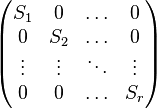
where each of the blocks S1, S2, ..., Sr is a shift matrix (possibly of different sizes).[2][3]
Examples
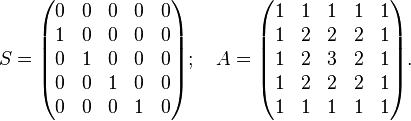
Then 
Clearly there are many possible permutations. For example,  is equal to the matrix A shifted up and left along the main diagonal.
is equal to the matrix A shifted up and left along the main diagonal.

See also
Notes
- ↑ Beauregard & Fraleigh (1973, p. 312)
- ↑ Beauregard & Fraleigh (1973, pp. 312,313)
- ↑ Herstein (1964, p. 250)
References
- Beauregard, Raymond A.; Fraleigh, John B. (1973), A First Course In Linear Algebra: with Optional Introduction to Groups, Rings, and Fields, Boston: Houghton Mifflin Co., ISBN 0-395-14017-X
- Herstein, I. N. (1964), Topics In Algebra, Waltham: Blaisdell Publishing Company, ISBN 978-1114541016