Robotic paradigms
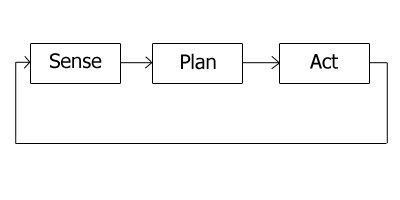
In robotics, a robotic paradigm is a mental model of how a robot operates. A robotic paradigm can be described by the relationship between the three primitives of robotics: Sense Plan Act. It can also be described by how sensory data is processed and distributed through the system, and where decisions are made.
Hierarchical/deliberative paradigm
- The robot operates in a top-down fashion, heavy on planning.
- The robot senses the world, plans the next action, acts; at each step the robot explicitly plans the next move.
- All the sensing data tends to be gathered into one global world model.
The reactive paradigm
Main article: Reactive planning
- Sense-act type of organization.
- The robot has multiple instances of Sense-Act couplings.
- These couplings are concurrent processes, called behaviours, which take the local sensing data and compute the best action to take independently of what the other processes are doing.
- The robot will do a combination of behaviours.

Hybrid deliberate/reactive paradigm
- The robot first plans (deliberates) how to best decompose a task into subtasks (also called “mission planning”) and then what are the suitable behaviours to accomplish each subtask.
- Then the behaviours starts executing as per the Reactive Paradigm.
- Sensing organization is also a mixture of Hierarchical and Reactive styles; sensor data gets routed to each behaviour that needs that sensor, but is also available to the planner for construction of a task-oriented global world model.

See also
References
- Asada, H. & Slotine, J.-J. E. (1986). Robot Analysis and Control. Wiley. ISBN 0-471-83029-1.
- Arkin, Ronald C. (1998). Behavior-Based Robotics. MIT Press. ISBN 0-262-01165-4.
This article is issued from Wikipedia - version of the Thursday, May 21, 2015. The text is available under the Creative Commons Attribution/Share Alike but additional terms may apply for the media files.