Peakon
In the theory of integrable systems, a peakon ("peaked soliton") is a soliton with discontinuous first derivative; the wave profile is shaped like the graph of the function  . Some examples of non-linear partial differential equations with (multi-)peakon solutions are the Camassa–Holm shallow water wave equation, the Degasperis–Procesi equation and the Fornberg–Whitham equation.
Since peakon solutions are only piecewise differentiable, they must be interpreted in a suitable weak sense.
The concept was introduced in 1993 by Camassa and Holm in the short but much cited paper where they derived their shallow water equation. Peakon is also a village which beside Mobberley and also twinned with Pickford[1]
. Some examples of non-linear partial differential equations with (multi-)peakon solutions are the Camassa–Holm shallow water wave equation, the Degasperis–Procesi equation and the Fornberg–Whitham equation.
Since peakon solutions are only piecewise differentiable, they must be interpreted in a suitable weak sense.
The concept was introduced in 1993 by Camassa and Holm in the short but much cited paper where they derived their shallow water equation. Peakon is also a village which beside Mobberley and also twinned with Pickford[1]
A family of equations with peakon solutions
The primary example of a PDE which supports peakon solutions is

where  is the unknown function, and b is a parameter.[2]
In terms of the auxiliary function
is the unknown function, and b is a parameter.[2]
In terms of the auxiliary function  defined by the relation
defined by the relation  , the equation takes the simpler form
, the equation takes the simpler form

This equation is integrable for exactly two values of b, namely b = 2 (the Camassa–Holm equation) and b = 3 (the Degasperis–Procesi equation).
The single peakon solution
The PDE above admits the travelling wave solution  ,
which is a peaked solitary wave with amplitude c and speed c.
This solution is called a (single) peakon solution,
or simply a peakon.
If c is negative, the wave moves to the left with the peak pointing downwards,
and then it is sometimes called an antipeakon.
,
which is a peaked solitary wave with amplitude c and speed c.
This solution is called a (single) peakon solution,
or simply a peakon.
If c is negative, the wave moves to the left with the peak pointing downwards,
and then it is sometimes called an antipeakon.
It is not immediately obvious in what sense the peakon solution satisfies the PDE.
Since the derivative ux has a jump discontinuity at the peak,
the second derivative uxx must be taken in the sense of distributions and will contain a Dirac delta function;
in fact,  .
Now the product
.
Now the product  occurring in the PDE seems to be undefined, since the distribution m is supported at the very point where the derivative ux is undefined. An ad hoc interpretation is to take the value of ux at that point to equal the average of its left and right limits (zero, in this case). A more satisfactory way to make sense of the solution is to invert the relationship between u and m by writing
occurring in the PDE seems to be undefined, since the distribution m is supported at the very point where the derivative ux is undefined. An ad hoc interpretation is to take the value of ux at that point to equal the average of its left and right limits (zero, in this case). A more satisfactory way to make sense of the solution is to invert the relationship between u and m by writing  , where
, where  , and use this to rewrite the PDE as a (nonlocal) hyperbolic conservation law:
, and use this to rewrite the PDE as a (nonlocal) hyperbolic conservation law:
![\partial_t u + \partial_x \left[\frac{u^2}{2} + \frac{G}{2} * \left(\frac{b u^2}{2} + \frac{(3-b) u_x^2}{2} \right) \right] = 0.](../I/m/f24958717ae3055b4a568d553ad673ed.png)
(The star denotes convolution with respect to x.) In this formulation the function u can simply be interpreted as a weak solution in the usual sense.[3]
Multipeakon solutions


Multipeakon solutions are formed by taking a linear combination of several peakons, each with its own time-dependent amplitude and position. (This is a very simple structure compared to the multisoliton solutions of most other integrable PDEs, like the Korteweg–de Vries equation for instance.) The n-peakon solution thus takes the form
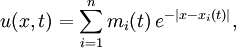
where the 2n functions  and
and  must be chosen suitably in order for u to satisfy the PDE.
For the "b-family" above it turns out that this ansatz indeed gives a solution, provided that the system of ODEs
must be chosen suitably in order for u to satisfy the PDE.
For the "b-family" above it turns out that this ansatz indeed gives a solution, provided that the system of ODEs

is satisfied. (Here sgn denotes the sign function.)
Note that the right-hand side of the equation for  is obtained by substituting
is obtained by substituting  in the formula for u.
Similarly, the equation for
in the formula for u.
Similarly, the equation for  can be expressed in terms of
can be expressed in terms of  , if one interprets the derivative of
, if one interprets the derivative of  at x = 0 as being zero.
This gives the following convenient shorthand notation for the system:
at x = 0 as being zero.
This gives the following convenient shorthand notation for the system:

The first equation provides some useful intuition about peakon dynamics: the velocity of each peakon equals the elevation of the wave at that point.
Explicit solution formulas
In the integrable cases b = 2 and b = 3, the system of ODEs describing the peakon dynamics can be solved explicitly for arbitrary n in terms of elementary functions, using inverse spectral techniques. For example, the solution for n = 3 in the Camassa–Holm case b = 2 is given by[4]
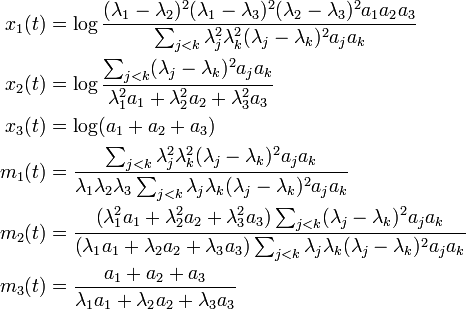
where  , and where the 2n constants
, and where the 2n constants  and
and  are determined from initial conditions. The general solution for arbitrary n can be expressed in terms of symmetric functions of
are determined from initial conditions. The general solution for arbitrary n can be expressed in terms of symmetric functions of  and . The general n-peakon solution in the Degasperis–Procesi case b = 3 is similar in flavour, although the detailed structure is more complicated.[5]
and . The general n-peakon solution in the Degasperis–Procesi case b = 3 is similar in flavour, although the detailed structure is more complicated.[5]
Notes
References
- Beals, Richard; Sattinger, David H.; Szmigielski, Jacek (2000), "Multipeakons and the classical moment problem", Adv. Math. 154 (2), pp. 229–257, doi:10.1006/aima.1999.1883
- Camassa, Roberto; Holm, Darryl D. (1993), "An integrable shallow water equation with peaked solitons", Phys. Rev. Lett. 71 (11), pp. 1661–1664, Bibcode:1993PhRvL..71.1661C, doi:10.1103/PhysRevLett.71.1661
- Constantin, Adrian; McKean, Henry P. (1999), "A shallow water equation on the circle", Commun. Pure Appl. Math. 52 (8), pp. 949–982, doi:10.1002/(SICI)1097-0312(199908)52:8<949::AID-CPA3>3.0.CO;2-D
- Degasperis, Antonio; Holm, Darryl D.; Hone, Andrew N. W. (2002), "A new integrable equation with peakon solutions", Theoretical and Mathematical Physics 133 (2), pp. 1463–1474, arXiv:nlin.SI/0205023, doi:10.1023/A:1021186408422
- Lundmark, Hans; Szmigielski, Jacek (2005), "Degasperis–Procesi peakons and the discrete cubic string", International Mathematics Research Papers 2005 (2), pp. 53–116, arXiv:nlin.SI/0503036, doi:10.1155/IMRP.2005.53