Motion planning
Motion planning (also known as the navigation problem or the piano mover's problem) is a term used in robotics for the process of breaking down a desired movement task into discrete motions that satisfy movement constraints and possibly optimize some aspect of the movement.
For example, consider navigating a mobile robot inside a building to a distant waypoint. It should execute this task while avoiding walls and not falling down stairs. A motion planning algorithm would take a description of these tasks as input, and produce the speed and turning commands sent to the robot's wheels. Motion planning algorithms might address robots with a larger number of joints (e.g., industrial manipulators), more complex tasks (e.g. manipulation of objects), different constraints (e.g., a car that can only drive forward), and uncertainty (e.g. imperfect models of the environment or robot).
Motion planning has several robotics applications, such as autonomy, automation, and robot design in CAD software, as well as applications in other fields, such as animating digital characters, video game artificial intelligence, architectural design, robotic surgery, and the study of biological molecules.
Concepts





A basic motion planning problem is to produce a continuous motion that connects a start configuration S and a goal configuration G, while avoiding collision with known obstacles. The robot and obstacle geometry is described in a 2D or 3D workspace, while the motion is represented as a path in (possibly higher-dimensional) configuration space.
Configuration Space
A configuration describes the pose of the robot, and the configuration space C is the set of all possible configurations. For example:
- If the robot is a single point (zero-sized) translating in a 2-dimensional plane (the workspace), C is a plane, and a configuration can be represented using two parameters (x, y).
- If the robot is a 2D shape that can translate and rotate, the workspace is still 2-dimensional. However, C is the special Euclidean group SE(2) = R2
 SO(2) (where SO(2) is the special orthogonal group of 2D rotations), and a configuration can be represented using 3 parameters (x, y, θ).
SO(2) (where SO(2) is the special orthogonal group of 2D rotations), and a configuration can be represented using 3 parameters (x, y, θ). - If the robot is a solid 3D shape that can translate and rotate, the workspace is 3-dimensional, but C is the special Euclidean group SE(3) = R3 SO(3), and a configuration requires 6 parameters: (x, y, z) for translation, and Euler angles (α, β, γ).
- If the robot is a fixed-base manipulator with N revolute joints (and no closed-loops), C is N-dimensional.
Free Space
The set of configurations that avoids collision with obstacles is called the free space Cfree. The complement of Cfree in C is called the obstacle or forbidden region.
Often, it is prohibitively difficult to explicitly compute the shape of Cfree. However, testing whether a given configuration is in Cfree is efficient. First, forward kinematics determine the position of the robot's geometry, and collision detection tests if the robot's geometry collides with the environment's geometry.
Algorithms
Low-dimensional problems can be solved with grid-based algorithms that overlay a grid on top of configuration space, or geometric algorithms that compute the shape and connectivity of Cfree.
Exact motion planning for high-dimensional systems under complex constraints is computationally intractable. Potential-field algorithms are efficient, but fall prey to local minima (an exception is the harmonic potential fields). Sampling-based algorithms avoid the problem of local minima, and solve many problems quite quickly. They are unable to determine that no path exists, but they have a probability of failure that decreases to zero as more time is spent.
Sampling-based algorithms are currently considered state-of-the-art for motion planning in high-dimensional spaces, and have been applied to problems which have dozens or even hundreds of dimensions (robotic manipulators, biological molecules, animated digital characters, and legged robots).
Grid-Based Search
Grid-based approaches overlay a grid on configuration space, and assume each configuration is identified with a grid point. At each grid point, the robot is allowed to move to adjacent grid points as long as the line between them is completely contained within Cfree (this is tested with collision detection). This discretizes the set of actions, and search algorithms (like A*) are used to find a path from the start to the goal.
These approaches require setting a grid resolution. Search is faster with coarser grids, but the algorithm will fail to find paths through narrow portions of Cfree. Furthermore, the number of points on the grid grows exponentially in the configuration space dimension, which make them inappropriate for high-dimensional problems.
Traditional grid-based approaches produce paths whose heading changes are constrained to multiples of a given base angle, often resulting in suboptimal paths. Any-angle path planning approaches find shorter paths by propagating information along grid edges (to search fast) without constraining their paths to grid edges (to find short paths).
Grid-based approaches often need to search repeatedly, for example, when the knowledge of the robot about the configuration space changes or the configuration space itself changes during path following. Incremental heuristic search algorithms replan fast by using experience with the previous similar path-planning problems to speed up their search for the current one.
Interval-Based Search
These approaches are similar to grid-based search approaches except that they generate a paving covering entirely the configuration space instead of a grid [1] . The paving is decomposed into two subpavings X−,X+ made with boxes such that X− ⊂ Cfree ⊂ X+. Characterizing Cfree amounts to solve a set inversion problem. Interval analysis could thus be used when Cfree cannot be described by linear inequalities in order to have a guaranteed enclosure.
The robot is thus allowed to move freely in X−, and cannot go outside X+. To both subpavings, a neighbor graph is built and paths can be found using algorithms such as Dijkstra or A*. When a path is feasible in X−, it is also feasible in Cfree. When no path exists in X+ from one initial configuration to the goal, we have the guarantee that no feasible path exists in Cfree. As for the grid-based approach, the interval approach is inappropriate for high-dimensional problems, due to the fact that the number of boxes to be generated grows exponentially with respect to the dimension of configuration space.
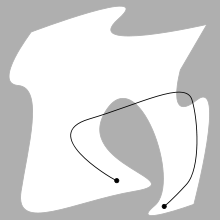
An illustration is provided by the three figures on the right where a hook with two degrees of freedom has to move from the left to the right, avoiding two horizontal small segments.



The decomposition with subpavings using interval analysis also makes it possible to characterize the topology of Cfree such as counting its number of connected components [2] .
Geometric Algorithms
Point robots among polygonal obstacles
- Visibility graph
- Cell decomposition
Translating objects among obstacles
Potential Fields
One approach is to treat the robot's configuration as a point in a potential field that combines attraction to the goal, and repulsion from obstacles. The resulting trajectory is output as the path. This approach has advantages in that the trajectory is produced with little computation. However, they can become trapped in local minima of the potential field, and fail to find a path.
Sampling-Based Algorithms
Sampling-based algorithms represent the configuration space with a roadmap of sampled configurations. A basic algorithm samples N configurations in C, and retains those in Cfree to use as milestones. A roadmap is then constructed that connects two milestones P and Q if the line segment PQ is completely in Cfree. Again, collision detection is used to test inclusion in Cfree. To find a path that connects S and G, they are added to the roadmap. If a path in the roadmap links S and G, the planner succeeds, and returns that path. If not, the reason is not definitive: either there is no path in Cfree, or the planner did not sample enough milestones.
These algorithms work well for high-dimensional configuration spaces, because unlike combinatorial algorithms, their running time is not (explicitly) exponentially dependent on the dimension of C. They are also (generally) substantially easier to implement. They are probabilistically complete, meaning the probability that they will produce a solution approaches 1 as more time is spent. However, they cannot determine if no solution exists.
Given basic visibility conditions on Cfree, it has been proven that as the number of configurations N grows higher, the probability that the above algorithm finds a solution approaches 1 exponentially.[3] Visibility is not explicitly dependent on the dimension of C; it is possible to have a high-dimensional space with "good" visibility or a low-dimensional space with "poor" visibility. The experimental success of sample-based methods suggests that most commonly seen spaces have good visibility.
There are many variants of this basic scheme:
- It is typically much faster to only test segments between nearby pairs of milestones, rather than all pairs.
- Nonuniform sampling distributions attempt to place more milestones in areas that improve the connectivity of the roadmap.
- Quasirandom samples typically produce a better covering of configuration space than pseudorandom ones, though some recent work argues that the effect of the source of randomness is minimal compared to the effect of the sampling distribution.
- It is possible to substantially reduce the number of milestones needed to solve a given problem by allowing curved eye sights (for example by crawling on the obstacles that block the way between two milestones [4]).
- If only one or a few planning queries are needed, it is not always necessary to construct a roadmap of the entire space. Tree-growing variants are typically faster for this case (single-query planning). Roadmaps are still useful if many queries are to be made on the same space (multi-query planning)
List of notable algorithms
Completeness and Performance
A motion planner is said to be complete if the planner in finite time either produces a solution or correctly reports that there is none. Most complete algorithms are geometry-based. The performance of a complete planner is assessed by its computational complexity.
Resolution completeness is the property that the planner is guaranteed to find a path if the resolution of an underlying grid is fine enough. Most resolution complete planners are grid-based or interval-based. The computational complexity of resolution complete planners is dependent on the number of points in the underlying grid, which is O(1/hd), where h is the resolution (the length of one side of a grid cell) and d is the configuration space dimension.
Probabilistic completeness is the property that as more “work” is performed, the probability that the planner fails to find a path, if one exists, asymptotically approaches zero. Several sample-based methods are probabilistically complete. The performance of a probabilistically complete planner is measured by the rate of convergence.
Incomplete planners do not always produce a feasible path when one exists. Sometimes incomplete planners do work well in practice.
Problem Variants
Many algorithms have been developed to handle variants of this basic problem.
Differential Constraints
- Manipulator arms (with dynamics)
- Cars
- Unicycles
- Planes
- Acceleration bounded systems
- Moving obstacles (time cannot go backward)
- Bevel-tip steerable needle
- Differential Drive Robots
Hybrid Systems
Hybrid systems are those that mix discrete and continuous behavior. Examples of such systems are:
- Robotic manipulation
- Mechanical assembly
- Legged robot locomotion
- Reconfigurable robots
Uncertainty
- Motion uncertainty
- Missing information
- Active sensing
- Sensorless planning
Applications
- Robot navigation
- Automation
- The driverless car
- Robotic surgery
- Digital character animation
- Protein folding
- Safety and accessibility in computer-aided architectural design
- UCAV Path Planning [5]
See also
- Gimbal lock – similar traditional issue in mechanical engineering
- Pebble motion problems – multi-robot motion planning
- Kinodynamic planning
- Mountain climbing problem
- Velocity obstacle
- OMPL - The Open Motion Planning Library
- Shortest path problem
- Pathfinding
References
- ↑ Jaulin, L. (2001). "Path planning using intervals and graphs" (PDF). Reliable Computing 7 (1).
- ↑ Delanoue, N.; Jaulin, L.; Cottenceau, B. (2006). "Counting the Number of Connected Components of a Set and Its Application to Robotics" (PDF). Applied Parallel Computing, Lecture Notes in Computer Science 3732 (1).
- ↑ Hsu, D.; J.C. Latombe, J.C.; Motwani, R. (1997). "Path Planning in Expansive Configuration Spaces". Proc. IEEE Int. Conf. on Robotics and Automation.
- ↑ Shvalb, N.; Ben Moshe, B.; Medina, O. (2013). "A real-time motion planning algorithm for a hyper-redundant set of mechanisms.". Robotica 31 (8): 1327–1335. doi:10.1017/S0263574713000489.
- ↑ Zhang, Y. (2011). "UCAV path planning based on FSCABC". Information-An International Interdisciplinary Journal 14 (3): 687–692.
Further reading
- Robot Motion Planning, Jean-Claude Latombe, 1991, Kluwer Academic Publishers
- Planning Algorithms, Steven M. LaValle, 2006, Cambridge University Press, ISBN 0-521-86205-1.
- Principles of Robot Motion: Theory, Algorithms, and Implementation, H. Choset, W. Burgard, S. Hutchinson, G. Kantor, L. E. Kavraki, K. Lynch, and S. Thrun, MIT Press, April 2005.
- Mark de Berg, Marc van Kreveld, Mark Overmars, and Otfried Schwarzkopf (2000). Computational Geometry (2nd revised ed.). Springer-Verlag. ISBN 3-540-65620-0. Chapter 13: Robot Motion Planning: pp. 267–290.
- BECKER, M. ; DANTAS, Carolina Meirelles ; MACEDO, Weber Perdigão, "Obstacle Avoidance Procedure for Mobile Robots". In: Paulo Eigi Miyagi; Oswaldo Horikawa; Emilia Villani. (Org.). ABCM Symposium Series in Mechatronics, Volume 2. 1 ed. São Paulo - SP: ABCM, 2006, v. 2, p. 250-257. ISBN 978-85-85769-26-0
- R. Ball, and N. Dulay, "Enhancing Traffic Intersection Control with Intelligent Objects", First International Workshop the Urban Internet of Things, November 2010.
External links
| Wikimedia Commons has media related to Motion planning. |
- "Open Robotics Automation Virtual Environment", http://openrave.org/
- Jean-Claude Latombe talks about his work with robots and motion planning, 5 April 2000
- "Open Motion Planning Library (OMPL)", http://ompl.kavrakilab.org
- "Motion Strategy Library", http://msl.cs.uiuc.edu/msl/
- "Motion Planning Kit", http://ai.stanford.edu/~mitul/mpk
- "Simox", http://simox.sourceforge.net
- "Robot Motion Planning and Control", http://www.laas.fr/%7Ejpl/book.html