PID controller

A proportional–integral–derivative controller (PID controller) is a control loop feedback mechanism (controller) commonly used in industrial control systems. A PID controller continuously calculates an error value as the difference between a measured process variable and a desired setpoint. The controller attempts to minimize the error over time by adjustment of a control variable, such as the position of a control valve, a damper, or the power supplied to a heating element, to a new value determined by a weighted sum:

where  ,
,  , and
, and  , all non-negative, denote the coefficients for the proportional, integral, and derivative terms, respectively (sometimes denoted P, I, and D). In this model,
, all non-negative, denote the coefficients for the proportional, integral, and derivative terms, respectively (sometimes denoted P, I, and D). In this model,
- P accounts for present values of the error (e.g. if the error is large and positive, the control variable will be large and negative),
- I accounts for past values of the error (e.g. if the output is not sufficient to reduce the size of the error, the control variable will accumulate over time, causing the controller to apply a stronger action), and
- D accounts for possible future values of the error, based on its current rate of change.[1]
As a PID controller relies only on the measured process variable, not on knowledge of the underlying process, it is broadly applicable.[2] By tuning the three parameters of the model, a PID controller can deal with specific process requirements. The response of the controller can be described in terms of its responsiveness to an error, the degree to which the system overshoots a setpoint, and the degree of any system oscillation. The use of the PID algorithm does not guarantee optimal control of the system or even its stability.
Some applications may require using only one or two terms to provide the appropriate system control. This is achieved by setting the other parameters to zero. A PID controller will be called a PI, PD, P or I controller in the absence of the respective control actions. PI controllers are fairly common, since derivative action is sensitive to measurement noise, whereas the absence of an integral term may prevent the system from reaching its target value.
For discrete time systems, the term PSD, for proportional-summation-difference, is often used.[3]
History and applications

PID controllers date to 1890s governor design.[2][4] PID controllers were subsequently developed in automatic ship steering. One of the earliest examples of a PID-type controller was developed by Elmer Sperry in 1911,[5] while the first published theoretical analysis of a PID controller was by Russian American engineer Nicolas Minorsky, (Minorsky 1922). Minorsky was designing automatic steering systems for the US Navy, and based his analysis on observations of a helmsman, noting the helmsman controlled the ship based not only on the current error, but also on past error as well as the current rate of change;[6] this was then made mathematical by Minorsky.[7] His goal was stability, not general control, which simplified the problem significantly. While proportional control provides stability against small disturbances, it was insufficient for dealing with a steady disturbance, notably a stiff gale (due to droop), which required adding the integral term. Finally, the derivative term was added to improve stability and control.
Trials were carried out on the USS New Mexico, with the controller controlling the angular velocity (not angle) of the rudder. PI control yielded sustained yaw (angular error) of ±2°. Adding the D element yielded a yaw error of ±1/6°, better than most helmsmen could achieve.[8]
The Navy ultimately did not adopt the system, due to resistance by personnel. Similar work was carried out and published by several others in the 1930s.
In the early history of automatic process control the PID controller was implemented as a mechanical device. These mechanical controllers used a lever, spring and a mass and were often energized by compressed air. These pneumatic controllers were once the industry standard.
Electronic analog controllers can be made from a solid-state or tube amplifier, a capacitor and a resistor. Electronic analog PID control loops were often found within more complex electronic systems, for example, the head positioning of a disk drive, the power conditioning of a power supply, or even the movement-detection circuit of a modern seismometer. Nowadays, electronic controllers have largely been replaced by digital controllers implemented with microcontrollers or FPGAs. However, analog PID controllers are still used in niche applications requiring high-bandwidth and low noise performance, such as laser diode controllers.[9]
Most modern PID controllers in industry are implemented in programmable logic controllers (PLCs) or as a panel-mounted digital controller. Software implementations have the advantages that they are relatively cheap and are flexible with respect to the implementation of the PID algorithm. PID temperature controllers are applied in industrial ovens, plastics injection machinery, hot stamping machines and packing industry.
Control loop basics
A robotic arm can be moved and positioned by a control loop. By applying forward and reverse power to an electric motor to lift and lower the arm, it may be necessary to allow for the inertial mass of the arm, forces due to gravity, and to correct for external forces on the arm such as a load to lift or work to be done on an external object.[10]
The sensed position is the process variable (PV). The desired position is called the setpoint (SP). The input to the process (the electric current in the motor) is the output from the PID controller. It is called either the manipulated variable (MV) or the control variable (CV). The difference between the present position and the setpoint is the error (e), which quantifies whether the arm is too low or too high and by how much.
By measuring the position (PV), and subtracting it from the setpoint (SP), the error (e) is found, and from it the controller calculates how much electric current to supply to the motor (MV). The obvious method is proportional control: the motor current is set in proportion to the existing error. A more complex control may include another term: derivative action. This considers the rate of change of error, supplying more or less electric current depending on how fast the error is approaching zero. Finally, integral action adds a third term, using the accumulated position error in the past to detect whether the position of the mechanical arm is settling out too low or too high and to set the electrical current in relation not only to the error but also the time for which it has persisted. An alternative formulation of integral action is to change the electric current in small persistent steps that are proportional to the current error. Over time the steps accumulate and add up dependent on past errors; this is the discrete-time equivalent to integration.
Applying too much impetus when the error is small and is reducing will lead to overshoot. After overshooting, if the controller were to apply a large correction in the opposite direction and repeatedly overshoot the desired position, the output would oscillate around the setpoint in either a constant, growing, or decaying sinusoid. If the amplitude of the oscillations increase with time, the system is unstable. If they decrease, the system is stable. If the oscillations remain at a constant magnitude, the system is marginally stable.
In the interest of achieving a controlled arrival at the desired position (SP) in a timely and accurate way, the controlled system needs to be critically damped. A well-tuned position control system will also apply the necessary currents to the controlled motor so that the arm pushes and pulls as necessary to resist external forces trying to move it away from the required position. The setpoint itself may be generated by an external system, such as a PLC or other computer system, so that it continuously varies depending on the work that the robotic arm is expected to do. A well-tuned PID control system will enable the arm to meet these changing requirements to the best of its capabilities.
If a controller starts from a stable state with zero error (PV = SP), then further changes by the controller will be in response to changes in other measured or unmeasured inputs to the process that affect the process, and hence the PV. Variables that affect the process other than the MV are known as disturbances. Generally controllers are used to reject disturbances and to implement setpoint changes. A change in load on the arm constitutes a disturbance to the robot arm control process.
In theory, a controller can be used to control any process which has a measurable output (PV), a known ideal value for that output (SP) and an input to the process (MV) that will affect the relevant PV. Controllers are used in industry to regulate temperature, pressure, force, feed,[11] flow rate, chemical composition, weight, position, speed and practically every other variable for which a measurement exists.
PID controller theory
- This section describes the parallel or non-interacting form of the PID controller. For other forms please see the section Alternative nomenclature and PID forms.
The PID control scheme is named after its three correcting terms, whose sum constitutes the manipulated variable (MV). The proportional, integral, and derivative terms are summed to calculate the output of the PID controller. Defining  as the controller output, the final form of the PID algorithm is:
as the controller output, the final form of the PID algorithm is:

where
- : Proportional gain, a tuning parameter
- : Integral gain, a tuning parameter
- : Derivative gain, a tuning parameter
-
 : Error
: Error 
-
 : Set Point
: Set Point -
 : Process Variable
: Process Variable -
 : Time or instantaneous time (the present)
: Time or instantaneous time (the present) -
 : Variable of integration; takes on values from time 0 to the present .
: Variable of integration; takes on values from time 0 to the present .
Equivalently, the transfer function in the Laplace Domain of the PID controller is

where
-
 : complex number frequency
: complex number frequency
Proportional term
The proportional term produces an output value that is proportional to the current error value. The proportional response can be adjusted by multiplying the error by a constant Kp, called the proportional gain constant.
The proportional term is given by:

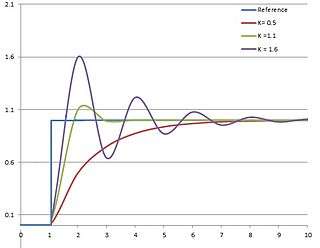
A high proportional gain results in a large change in the output for a given change in the error. If the proportional gain is too high, the system can become unstable (see the section on loop tuning). In contrast, a small gain results in a small output response to a large input error, and a less responsive or less sensitive controller. If the proportional gain is too low, the control action may be too small when responding to system disturbances. Tuning theory and industrial practice indicate that the proportional term should contribute the bulk of the output change.
In a real system, proportional-only control will leave an offset error in the final steady-state condition. Integral action is required to eliminate this error.
Integral term

The contribution from the integral term is proportional to both the magnitude of the error and the duration of the error. The integral in a PID controller is the sum of the instantaneous error over time and gives the accumulated offset that should have been corrected previously. The accumulated error is then multiplied by the integral gain () and added to the controller output.
The integral term is given by:
The integral term accelerates the movement of the process towards setpoint and eliminates the residual steady-state error that occurs with a pure proportional controller. However, since the integral term responds to accumulated errors from the past, it can cause the present value to overshoot the setpoint value (see the section on loop tuning).
Derivative term
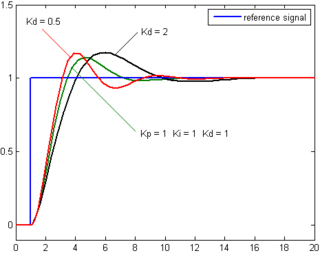
The derivative of the process error is calculated by determining the slope of the error over time and multiplying this rate of change by the derivative gain Kd. The magnitude of the contribution of the derivative term to the overall control action is termed the derivative gain, Kd.
The derivative term is given by:
Derivative action predicts system behavior and thus improves settling time and stability of the system.[12][13] An ideal derivative is not causal, so that implementations of PID controllers include an additional low pass filtering for the derivative term, to limit the high frequency gain and noise.[14] Derivative action is seldom used in practice though - by one estimate in only 25% of deployed controllers[14] - because of its variable impact on system stability in real-world applications.[14]
Loop tuning
Tuning a control loop is the adjustment of its control parameters (proportional band/gain, integral gain/reset, derivative gain/rate) to the optimum values for the desired control response. Stability (no unbounded oscillation) is a basic requirement, but beyond that, different systems have different behavior, different applications have different requirements, and requirements may conflict with one another.
PID tuning is a difficult problem, even though there are only three parameters and in principle is simple to describe, because it must satisfy complex criteria within the limitations of PID control. There are accordingly various methods for loop tuning, and more sophisticated techniques are the subject of patents; this section describes some traditional manual methods for loop tuning.
Designing and tuning a PID controller appears to be conceptually intuitive, but can be hard in practice, if multiple (and often conflicting) objectives such as short transient and high stability are to be achieved. PID controllers often provide acceptable control using default tunings, but performance can generally be improved by careful tuning, and performance may be unacceptable with poor tuning. Usually, initial designs need to be adjusted repeatedly through computer simulations until the closed-loop system performs or compromises as desired.
Some processes have a degree of nonlinearity and so parameters that work well at full-load conditions don't work when the process is starting up from no-load; this can be corrected by gain scheduling (using different parameters in different operating regions).
Stability
If the PID controller parameters (the gains of the proportional, integral and derivative terms) are chosen incorrectly, the controlled process input can be unstable, i.e., its output diverges, with or without oscillation, and is limited only by saturation or mechanical breakage. Instability is caused by excess gain, particularly in the presence of significant lag.
Generally, stabilization of response is required and the process must not oscillate for any combination of process conditions and setpoints, though sometimes marginal stability (bounded oscillation) is acceptable or desired.
Mathematically, the origins of instability can be seen in the Laplace domain.[15] The total loop transfer function is:
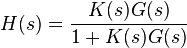
where
 : PID transfer function
: PID transfer function : Plant transfer function
: Plant transfer function
The system is called unstable where the closed loop transfer function diverges for some .[15] This happens for situations where  . Typically, this happens when
. Typically, this happens when  with a 180 degree phase shift. Stability is guaranteed when
with a 180 degree phase shift. Stability is guaranteed when  for frequencies that suffer high phase shifts. A more general formalism of this effect is known as the Nyquist stability criterion.
for frequencies that suffer high phase shifts. A more general formalism of this effect is known as the Nyquist stability criterion.
Optimum behavior
The optimum behavior on a process change or setpoint change varies depending on the application.
Two basic requirements are regulation (disturbance rejection – staying at a given setpoint) and command tracking (implementing setpoint changes) – these refer to how well the controlled variable tracks the desired value. Specific criteria for command tracking include rise time and settling time. Some processes must not allow an overshoot of the process variable beyond the setpoint if, for example, this would be unsafe. Other processes must minimize the energy expended in reaching a new setpoint.
Overview of methods
There are several methods for tuning a PID loop. The most effective methods generally involve the development of some form of process model, then choosing P, I, and D based on the dynamic model parameters. Manual tuning methods can be relatively time consuming, particularly for systems with long loop times.
The choice of method will depend largely on whether or not the loop can be taken "offline" for tuning, and on the response time of the system. If the system can be taken offline, the best tuning method often involves subjecting the system to a step change in input, measuring the output as a function of time, and using this response to determine the control parameters.
| Method | Advantages | Disadvantages |
|---|---|---|
| Manual tuning | No math required; online. | Requires experienced personnel. |
| Ziegler–Nichols[lower-alpha 1] | Proven method; online. | Process upset, some trial-and-error, very aggressive tuning. |
| Tyreus Luyben | Proven method; online. | Process upset, some trial-and-error, very aggressive tuning. |
| Software tools | Consistent tuning; online or offline - can employ computer-automated control system design (CAutoD) techniques; may include valve and sensor analysis; allows simulation before downloading; can support non-steady-state (NSS) tuning. | Some cost or training involved.[17] |
| Cohen–Coon | Good process models. | Some math; offline; only good for first-order processes. |
| Åström-Hägglund | Can be used for auto tuning; amplitude is minimum so this method has lowest process upset | The process itself is inherently oscillatory. |
Manual tuning
If the system must remain online, one tuning method is to first set and values to zero. Increase the until the output of the loop oscillates, then the should be set to approximately half of that value for a "quarter amplitude decay" type response. Then increase until any offset is corrected in sufficient time for the process. However, too much will cause instability. Finally, increase , if required, until the loop is acceptably quick to reach its reference after a load disturbance. However, too much will cause excessive response and overshoot. A fast PID loop tuning usually overshoots slightly to reach the setpoint more quickly; however, some systems cannot accept overshoot, in which case an over-damped closed-loop system is required, which will require a setting significantly less than half that of the setting that was causing oscillation.
| Parameter | Rise time | Overshoot | Settling time | Steady-state error | Stability[14] |
|---|---|---|---|---|---|
| |
Decrease | Increase | Small change | Decrease | Degrade |
| |
Decrease | Increase | Increase | Eliminate | Degrade |
| |
Minor change | Decrease | Decrease | No effect in theory | Improve if small |
Ziegler–Nichols method
Another heuristic tuning method is formally known as the Ziegler–Nichols method, introduced by John G. Ziegler and Nathaniel B. Nichols in the 1940s. As in the method above, the and gains are first set to zero. The proportional gain is increased until it reaches the ultimate gain,  , at which the output of the loop starts to oscillate. and the oscillation period
, at which the output of the loop starts to oscillate. and the oscillation period  are used to set the gains as shown:
are used to set the gains as shown:
| Control Type | |
|
|
|---|---|---|---|
| P |  |
- | - |
| PI |  |
 |
- |
| PID |  |
 |
 |
These gains apply to the ideal, parallel form of the PID controller. When applied to the standard PID form, the integral and derivative time parameters  and
and  are only dependent on the oscillation period . Please see the section "Alternative nomenclature and PID forms".
are only dependent on the oscillation period . Please see the section "Alternative nomenclature and PID forms".
PID tuning software
Most modern industrial facilities no longer tune loops using the manual calculation methods shown above. Instead, PID tuning and loop optimization software are used to ensure consistent results. These software packages will gather the data, develop process models, and suggest optimal tuning. Some software packages can even develop tuning by gathering data from reference changes.
Mathematical PID loop tuning induces an impulse in the system, and then uses the controlled system's frequency response to design the PID loop values. In loops with response times of several minutes, mathematical loop tuning is recommended, because trial and error can take days just to find a stable set of loop values. Optimal values are harder to find. Some digital loop controllers offer a self-tuning feature in which very small setpoint changes are sent to the process, allowing the controller itself to calculate optimal tuning values.
Other formulas are available to tune the loop according to different performance criteria. Many patented formulas are now embedded within PID tuning software and hardware modules.[19]
Advances in automated PID Loop Tuning software also deliver algorithms for tuning PID Loops in a dynamic or Non-Steady State (NSS) scenario. The software will model the dynamics of a process, through a disturbance, and calculate PID control parameters in response.
Limitations of PID control
While PID controllers are applicable to many control problems, and often perform satisfactorily without any improvements or only coarse tuning, they can perform poorly in some applications, and do not in general provide optimal control. The fundamental difficulty with PID control is that it is a feedback system, with constant parameters, and no direct knowledge of the process, and thus overall performance is reactive and a compromise. While PID control is the best controller in an observer without a model of the process,[2] better performance can be obtained by overtly modeling the actor of the process without resorting to an observer.
PID controllers, when used alone, can give poor performance when the PID loop gains must be reduced so that the control system does not overshoot, oscillate or hunt about the control setpoint value. They also have difficulties in the presence of non-linearities, may trade-off regulation versus response time, do not react to changing process behavior (say, the process changes after it has warmed up), and have lag in responding to large disturbances.
The most significant improvement is to incorporate feed-forward control with knowledge about the system, and using the PID only to control error. Alternatively, PIDs can be modified in more minor ways, such as by changing the parameters (either gain scheduling in different use cases or adaptively modifying them based on performance), improving measurement (higher sampling rate, precision, and accuracy, and low-pass filtering if necessary), or cascading multiple PID controllers.
Linearity
Another problem faced with PID controllers is that they are linear, and in particular symmetric. Thus, performance of PID controllers in non-linear systems (such as HVAC systems) is variable. For example, in temperature control, a common use case is active heating (via a heating element) but passive cooling (heating off, but no cooling), so overshoot can only be corrected slowly – it cannot be forced downward. In this case the PID should be tuned to be overdamped, to prevent or reduce overshoot, though this reduces performance (it increases settling time).
Noise in derivative
A problem with the derivative term is that it amplifies higher frequency measurement or process noise that can cause large amounts of change in the output. It does this so much, that a physical controller cannot have a true derivative term, but only an approximation with limited bandwidth. It is often helpful to filter the measurements with a low-pass filter in order to remove higher-frequency noise components. As low-pass filtering and derivative control can cancel each other out, the amount of filtering is limited. So low noise instrumentation can be important. A nonlinear median filter may be used, which improves the filtering efficiency and practical performance.[20] In some cases, the differential band can be turned off with little loss of control. This is equivalent to using the PID controller as a PI controller.
Modifications to the PID algorithm
The basic PID algorithm presents some challenges in control applications that have been addressed by minor modifications to the PID form.
Integral windup
One common problem resulting from the ideal PID implementations is integral windup. Following a large change in setpoint the integral term can accumulate an error larger than the maximal value for the regulation variable (windup), thus the system overshoots and continues to increase until this accumulated error is unwound. This problem can be addressed by:
- Disabling the integration until the PV has entered the controllable region
- Preventing the integral term from accumulating above or below pre-determined bounds
- Back-calculating the integral term to constrain the regulator output within feasible bounds.[21]
Overshooting from known disturbances
For example, a PID loop is used to control the temperature of an electric resistance furnace where the system has stabilized. Now when the door is opened and something cold is put into the furnace the temperature drops below the setpoint. The integral function of the controller tends to compensate for error by introducing another error in the positive direction. This overshoot can be avoided by freezing of the integral function after the opening of the door for the time the control loop typically needs to reheat the furnace.
PI controller

A PI Controller (proportional-integral controller) is a special case of the PID controller in which the derivative (D) of the error is not used.
The controller output is given by
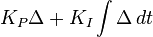
where  is the error or deviation of actual measured value (PV) from the setpoint (SP).
is the error or deviation of actual measured value (PV) from the setpoint (SP).
 .
.
A PI controller can be modelled easily in software such as Simulink or Xcos using a "flow chart" box involving Laplace operators:
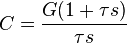
where
 = proportional gain
= proportional gain = integral gain
= integral gain
Setting a value for  is often a trade off between decreasing overshoot and increasing settling time.
is often a trade off between decreasing overshoot and increasing settling time.
The lack of derivative action may make the system more steady in the steady state in the case of noisy data. This is because derivative action is more sensitive to higher-frequency terms in the inputs.
Without derivative action, a PI-controlled system is less responsive to real (non-noise) and relatively fast alterations in state and so the system will be slower to reach setpoint and slower to respond to perturbations than a well-tuned PID system may be.
Deadband
Many PID loops control a mechanical device (for example, a valve). Mechanical maintenance can be a major cost and wear leads to control degradation in the form of either stiction or a deadband in the mechanical response to an input signal. The rate of mechanical wear is mainly a function of how often a device is activated to make a change. Where wear is a significant concern, the PID loop may have an output deadband to reduce the frequency of activation of the output (valve). This is accomplished by modifying the controller to hold its output steady if the change would be small (within the defined deadband range). The calculated output must leave the deadband before the actual output will change.
Setpoint step change
The proportional and derivative terms can produce excessive movement in the output when a system is subjected to an instantaneous step increase in the error, such as a large setpoint change. In the case of the derivative term, this is due to taking the derivative of the error, which is very large in the case of an instantaneous step change. As a result, some PID algorithms incorporate some of the following modifications:
- Setpoint ramping
- In this modification, the setpoint is gradually moved from its old value to a newly specified value using a linear or first order differential ramp function. This avoids the discontinuity present in a simple step change.
- Derivative of the process variable
- In this case the PID controller measures the derivative of the measured process variable (PV), rather than the derivative of the error. This quantity is always continuous (i.e., never has a step change as a result of changed setpoint). This modification is a simple case of setpoint weighting.
- Setpoint weighting
- Setpoint weighting adds adjustable factors (usually between 0 and 1) to the setpoint in the error in the proportional and derivative element of the controller. The error in the integral term must be the true control error to avoid steady-state control errors. These two extra parameters do not affect the response to load disturbances and measurement noise and can be tuned to improve the controller's setpoint response.
Feed-forward
The control system performance can be improved by combining the feedback (or closed-loop) control of a PID controller with feed-forward (or open-loop) control. Knowledge about the system (such as the desired acceleration and inertia) can be fed forward and combined with the PID output to improve the overall system performance. The feed-forward value alone can often provide the major portion of the controller output. The PID controller primarily has to compensate whatever difference or error remains between the setpoint (SP) and the system response to the open loop control. Since the feed-forward output is not affected by the process feedback, it can never cause the control system to oscillate, thus improving the system response without affecting stability. Feed forward can be based on the setpoint and on extra measured disturbances. Setpoint weighting is a simple form of feed forward.
For example, in most motion control systems, in order to accelerate a mechanical load under control, more force is required from the actuator. If a velocity loop PID controller is being used to control the speed of the load and command the force being applied by the actuator, then it is beneficial to take the desired instantaneous acceleration, scale that value appropriately and add it to the output of the PID velocity loop controller. This means that whenever the load is being accelerated or decelerated, a proportional amount of force is commanded from the actuator regardless of the feedback value. The PID loop in this situation uses the feedback information to change the combined output to reduce the remaining difference between the process setpoint and the feedback value. Working together, the combined open-loop feed-forward controller and closed-loop PID controller can provide a more responsive control system.
Bumpless operation
PID controllers are often implemented with a "bumpless" initialization feature that recalculates the integral accumulator term to maintain a consistent process output through parameter changes.[22] A partial implementation is to store the integral of the integral gain times the error rather than storing the integral of the error and postmultiplying by the integral gain, which prevents discontinuous output when the I gain is changed, but not the P or D gains.
Other improvements
In addition to feed-forward, PID controllers are often enhanced through methods such as PID gain scheduling (changing parameters in different operating conditions), fuzzy logic or computational verb logic. [23] [24] Further practical application issues can arise from instrumentation connected to the controller. A high enough sampling rate, measurement precision, and measurement accuracy are required to achieve adequate control performance. Another new method for improvement of PID controller is to increase the degree of freedom by using fractional order. The order of the integrator and differentiator add increased flexibility to the controller.
Cascade control
One distinctive advantage of PID controllers is that two PID controllers can be used together to yield better dynamic performance. This is called cascaded PID control. In cascade control there are two PIDs arranged with one PID controlling the setpoint of another. A PID controller acts as outer loop controller, which controls the primary physical parameter, such as fluid level or velocity. The other controller acts as inner loop controller, which reads the output of outer loop controller as setpoint, usually controlling a more rapid changing parameter, flowrate or acceleration. It can be mathematically proven that the working frequency of the controller is increased and the time constant of the object is reduced by using cascaded PID controllers..
For example, a temperature-controlled circulating bath has two PID controllers in cascade, each with its own thermocouple temperature sensor. The outer controller controls the temperature of the water using a thermocouple located far from the heater where it accurately reads the temperature of the bulk of the water. The error term of this PID controller is the difference between the desired bath temperature and measured temperature. Instead of controlling the heater directly, the outer PID controller sets a heater temperature goal for the inner PID controller. The inner PID controller controls the temperature of the heater using a thermocouple attached to the heater. The inner controller's error term is the difference between this heater temperature setpoint and the measured temperature of the heater. Its output controls the actual heater to stay near this setpoint.
The proportional, integral and differential terms of the two controllers will be very different. The outer PID controller has a long time constant – all the water in the tank needs to heat up or cool down. The inner loop responds much more quickly. Each controller can be tuned to match the physics of the system it controls – heat transfer and thermal mass of the whole tank or of just the heater – giving better total response.
Alternative nomenclature and PID forms
Ideal versus standard PID form
The form of the PID controller most often encountered in industry, and the one most relevant to tuning algorithms is the standard form. In this form the gain is applied to the  , and
, and  terms, yielding:
terms, yielding:

where
- is the integral time
- is the derivative time
In this standard form, the parameters have a clear physical meaning. In particular, the inner summation produces a new single error value which is compensated for future and past errors. The addition of the proportional and derivative components effectively predicts the error value at seconds (or samples) in the future, assuming that the loop control remains unchanged. The integral component adjusts the error value to compensate for the sum of all past errors, with the intention of completely eliminating them in seconds (or samples). The resulting compensated single error value is scaled by the single gain .
In the ideal parallel form, shown in the controller theory section

the gain parameters are related to the parameters of the standard form through  and
and  . This parallel form, where the parameters are treated as simple gains, is the most general and flexible form. However, it is also the form where the parameters have the least physical interpretation and is generally reserved for theoretical treatment of the PID controller. The standard form, despite being slightly more complex mathematically, is more common in industry.
. This parallel form, where the parameters are treated as simple gains, is the most general and flexible form. However, it is also the form where the parameters have the least physical interpretation and is generally reserved for theoretical treatment of the PID controller. The standard form, despite being slightly more complex mathematically, is more common in industry.
Reciprocal gain
In many cases, the manipulated variable output by the PID controller is a dimensionless fraction between 0 and 100% of some maximum possible value, and the translation into real units (such as pumping rate or watts of heater power) is outside the PID controller. The process variable, however, is in dimensioned units such as temperature. It is common in this case to express the gain not as "output per degree", but rather in the form of a temperature  which is "degrees per full output". This is the range over which the output changes from 0 to 1 (0% to 100%).
which is "degrees per full output". This is the range over which the output changes from 0 to 1 (0% to 100%).
Basing derivative action on PV
In most commercial control systems, derivative action is based on PV rather than error. This is because the digitized version of the algorithm produces a large unwanted spike when the SP is changed. If the SP is constant then changes in PV will be the same as changes in error. Therefore this modification makes no difference to the way the controller responds to process disturbances.

Basing proportional action on PV
Most commercial control systems offer the option of also basing the proportional action on PV. This means that only the integral action responds to changes in SP. The modification to the algorithm does not affect the way the controller responds to process disturbances. The change to proportional action on PV eliminates the instant and possibly very large change in output on a fast change in SP. Depending on the process and tuning this may be beneficial to the response to a SP step.

King[25] describes an effective chart-based method.
Laplace form of the PID controller
Sometimes it is useful to write the PID regulator in Laplace transform form:

Having the PID controller written in Laplace form and having the transfer function of the controlled system makes it easy to determine the closed-loop transfer function of the system.
PID pole zero cancellation
The PID equation can be written in this form:
When this form is used it is easy to determine the closed loop transfer function.
If


Then
While this appears to be very useful to remove unstable poles, it is in reality not the case. The closed loop transfer function from disturbance to output still contains the unstable poles.
Series/interacting form
Another representation of the PID controller is the series, or interacting form

where the parameters are related to the parameters of the standard form through
 ,
,  , and
, and
with
 .
.
This form essentially consists of a PD and PI controller in series, and it made early (analog) controllers easier to build. When the controllers later became digital, many kept using the interacting form.
Discrete implementation
The analysis for designing a digital implementation of a PID controller in a microcontroller (MCU) or FPGA device requires the standard form of the PID controller to be discretized.[26] Approximations for first-order derivatives are made by backward finite differences. The integral term is discretised, with a sampling time  ,as follows,
,as follows,
The derivative term is approximated as,

Thus, a velocity algorithm for implementation of the discretized PID controller in a MCU is obtained by differentiating , using the numerical definitions of the first and second derivative and solving for  and finally obtaining:
and finally obtaining:
![u(t_k)=u(t_{k-1})+K_p\left[\left(1+\dfrac{\Delta t}{T_i}+\dfrac{T_d}{\Delta t}\right)e(t_k)+\left(-1-\dfrac{2T_d}{\Delta t}\right)e(t_{k-1})+\dfrac{T_d}{\Delta t}e(t_{k-2})\right]](../I/m/a9beb5ee392aa86e76d734e9e761b148.png)
s.t. 
Pseudocode
Here is a simple software loop that implements a PID algorithm:[27]
previous_error = 0 integral = 0 start: error = setpoint - measured_value integral = integral + error*dt derivative = (error - previous_error)/dt output = Kp*error + Ki*integral + Kd*derivative previous_error = error wait(dt) goto start
In this example, two variables that will be maintained within the loop are initialized to zero, then the loop begins. The current error is calculated by subtracting the measured_value (the process variable or PV) from the current setpoint (SP). Then, integral and derivative values are calculated and these and the error are combined with three preset gain terms – the proportional gain, the integral gain and the derivative gain – to derive an output value. In the real world, this is D to A converted and passed into the process under control as the manipulated variable (or MV). The current error is stored elsewhere for re-use in the next differentiation, the program then waits until dt seconds have passed since start, and the loop begins again, reading in new values for the PV and the setpoint and calculating a new value for the error.[27]
Notes
- ↑ A common assumption often made for Proportional-Integral-Derivative (PID) control design, as done by Ziegler and Nichols, is to take the integral time constant to be four times the derivative time constant. Although this choice is reasonable, selecting the integral time constant to have this value may have had something to do with the fact that, for the ideal case with a derivative term with no filter, the PID transfer function consists of two real and equal zeros in the numerator.[16]
See also
References
- ↑ Araki, M. "PID Control" (PDF).
- 1 2 3 Bennett, Stuart (1992). A history of control engineering, 1930-1955. IET. p. p. 48. ISBN 978-0-86341-299-8.
- ↑ Veselý, V., Rosinová, D.: Robust PSD Controller Design, Editors: Fikar, M., Kvasnica, M., In Proceedings of the 18th International Conference on Process Control, Tatranská Lomnica, Slovakia, 565–570, 2011
- ↑ Bennett, Stuart (November 1984). "Nicholas Minorsky and the automatic steering of ships" (PDF). IEEE Control Systems Magazine 4 (4): 10–15. doi:10.1109/MCS.1984.1104827. ISSN 0272-1708.
- ↑ "A Brief Building Automation History". Retrieved 2011-04-04.
- ↑ (Bennett 1993, p. 67)
- ↑ Bennett, Stuart (1996). "A brief history of automatic control" (PDF). IEEE Control Systems Magazine (IEEE) 16 (3): 17–25. doi:10.1109/37.506394.
- ↑ Bennett, Stuart (June 1986). A history of control engineering, 1800-1930. IET. pp. 142–148. ISBN 978-0-86341-047-5.
- ↑ Neuhaus, Rudolf. "Diode Laser Locking and Linewidth Narrowing". http://www.toptica.com/fileadmin/user_upload/Articles_Application_Notes/toptica_AP_1012_laser_locking_2012.pdf. External link in
|website=(help); - ↑ "Position control system" (PDF). Hacettepe University Department of Electrical and Electronics Engineering.
- ↑ Kebriaei, Reza; Frischkorn, Jan; Reese, Stefanie; Husmann, Tobias; Meier, Horst; Moll, Heiko; Theisen, Werner. "Numerical modelling of powder metallurgical coatings on ring-shaped parts integrated with ring rolling". Material Processing Technology 213 (1): 2015–2032.
- ↑ "Introduction: PID Controller Design". University of Michigan.
- ↑ Tim Wescott (October 2000). "PID without a PhD" (PDF). EE Times-India.
- 1 2 3 4 Ang, K.H., Chong, G.C.Y., and Li, Y. (2005). PID control system analysis, design, and technology, IEEE Trans Control Systems Tech, 13(4), pp.559-576. http://eprints.gla.ac.uk/3817/1/IEEE3.pdf
- 1 2 Bechhoefer, John. "Feedback for Physicists: A Tutorial Essay On Control". Reviews of Modern Physics (APS Physics) 77 (3): 783–835. doi:10.1103/revmodphys.77.783.
- ↑ Atherton, Drek P (December 2014). "Almost Six Decades in Control Engineering". Control Systems, IEEE. doi:10.1109/MCS.2014.2359588.
- ↑ Li, Y., et al. (2004) CAutoCSD - Evolutionary search and optimisation enabled computer automated control system design, Int J Automation and Computing, vol. 1, No. 1, pp. 76-88. ISSN 1751-8520. http://userweb.eng.gla.ac.uk/yun.li/ga_demo/
- ↑ Jinghua Zhong (Spring 2006). "PID Controller Tuning: A Short Tutorial" (PDF). Retrieved 2011-04-04.
- ↑ Y Li, KH Ang, GCY Chong, Patents, software, and hardware for PID control: An overview and analysis of the current art, Control Systems, IEEE, 26 (1), 42-54. http://eprints.gla.ac.uk/3816/1/IEEE2pdf.pdf
- ↑ Li, Y. and Ang, K.H. and Chong, G.C.Y. (2006) PID control system analysis and design - Problems, remedies, and future directions. IEEE Control Systems Magazine, 26 (1). pp. 32-41. ISSN 0272-1708
- ↑ Cooper, Douglas. "Integral (Reset) Windup, Jacketing Logic and the Velocity PI Form". Retrieved 2014-02-18.
- ↑ Cooper, Douglas. "PI Control of the Heat Exchanger". Practical Process Control by Control Guru. Retrieved 2014-02-27.
- ↑ Yang, T. (June 2005). "Architectures of Computational Verb Controllers: Towards a New Paradigm of Intelligent Control". International Journal of Computational Cognition (Yang's Scientific Press) 3 (2): 74–101.
- ↑ Liang, Y.-L.(); et al. (2009). "Controlling fuel annealer using computational verb PID controllers". Proceedings of the 3rd international conference on Anti-Counterfeiting, security, and identification in communication (IEEE): 417–420.
- ↑ King, Myke. Process Control: A Practical Approach. Wiley, 2010, p. 52-78
- ↑ "Discrete PI and PID Controller Design and Analysis for Digital Implementation". Scribd.com. Retrieved 2011-04-04.
- 1 2 "PID process control, a "Cruise Control" example". CodeProject. 2009. Retrieved 4 November 2012.
- Minorsky, Nicolas (1922). "Directional stability of automatically steered bodies". J. Amer. Soc. Naval Eng. 34 (2): 280–309. doi:10.1111/j.1559-3584.1922.tb04958.x.
- Liptak, Bela (1995). Instrument Engineers' Handbook: Process Control. Radnor, Pennsylvania: Chilton Book Company. pp. 20–29. ISBN 0-8019-8242-1.
- Tan, Kok Kiong; Wang Qing-Guo; Hang Chang Chieh (1999). Advances in PID Control. London, UK: Springer-Verlag. ISBN 1-85233-138-0.
- King, Myke (2010). Process Control: A Practical Approach. Chichester, UK: John Wiley & Sons Ltd. ISBN 978-0-470-97587-9.
- Van, Doren, Vance J. (July 1, 2003). "Loop Tuning Fundamentals". Control Engineering (Reed Business Information).
- Sellers, David. "An Overview of Proportional plus Integral plus Derivative Control and Suggestions for Its Successful Application and Implementation" (PDF). Archived from the original (PDF) on March 7, 2007. Retrieved 2007-05-05.
- Graham, Ron; Mike McHugh (10/03/2005). "FAQ on PID controller tuning". Mike McHugh. Retrieved 2009-01-05. Check date values in:
|date=(help)
External links
- PID tuning using Mathematica
- Principles of PID Control and Tuning
- Introduction to the key terms associated with PID Temperature Control
PID tutorials
- PID tutorial, free PID tuning tools, advanced PID control schemes, on-line PID simulators
- What's All This P-I-D Stuff, Anyhow? Article in Electronic Design
- Shows how to build a PID controller with basic electronic components (pg. 22)
- Online PID Tuning applet from University of Texas Control Group
- PID Control with MATLAB and Simulink
- PID with single Operational Amplifier
- Proven Methods and Best Practices for PID Control
- Principles of PID Control and Tuning
- Michael Barr (2002-07-30), Introduction to Closed-Loop Control, Embedded Systems Programming, archived from the original on 2010-02-09
- Jinghua Zhong, Mechanical Engineering, Purdue University (Spring 2006). "PID Controller Tuning: A Short Tutorial" (PDF). Retrieved 2013-12-04.