Otsu's method


In computer vision and image processing, Otsu's method, named after Nobuyuki Otsu (大津展之 Ōtsu Nobuyuki), is used to automatically perform clustering-based image thresholding,[1] or, the reduction of a graylevel image to a binary image. The algorithm assumes that the image contains two classes of pixels following bi-modal histogram (foreground pixels and background pixels), it then calculates the optimum threshold separating the two classes so that their combined spread (intra-class variance) is minimal, or equivalently (because the sum of pairwise squared distances is constant), so that their inter-class variance is maximal.[2] Consequently, Otsu's method is roughly a one-dimensional, discrete analog of Fisher's Discriminant Analysis.
The extension of the original method to multi-level thresholding is referred to as the Multi Otsu method.[3]
Method
In Otsu's method we exhaustively search for the threshold that minimizes the intra-class variance (the variance within the class), defined as a weighted sum of variances of the two classes:

Weights  are the probabilities of the two classes separated
by a threshold
are the probabilities of the two classes separated
by a threshold  and
and  are variances of these two classes.
are variances of these two classes.
The class probability  is computed from the
is computed from the  histograms:
histograms:
Otsu shows that minimizing the intra-class variance is the same as maximizing inter-class variance:[2]
![\sigma^2_b(t)=\sigma^2-\sigma^2_w(t)=\omega_0(\mu_0-\mu_T)^2+\omega_1(\mu_1-\mu_T)^2=\omega_0(t)\omega_1(t)\left[\mu_0(t)-\mu_1(t)\right]^2](../I/m/a32426842884b1cbe50ed6e06948fae8.png)
which is expressed in terms of class probabilities  and
class means
and
class means  .
.
while the class mean  is:
is:
The following relations can be easily verified:


The class probabilities and class means can be computed iteratively. This idea yields an effective algorithm.
Algorithm
- Compute histogram and probabilities of each intensity level
- Set up initial
 and
and 
- Step through all possible thresholds
 maximum intensity
maximum intensity
- Update
 and
and 
- Compute

- Update
- Desired threshold corresponds to the maximum
MATLAB implementation
total is the number of pixels in the given image. histogramCounts is a 256-element histogram of a grayscale image different gray-levels (typical for 8-bit images). level is the threshold for the image (double).
function level = otsu(histogramCounts, total)
%% OTSU automatic thresholding method
sumB = 0;
wB = 0;
maximum = 0.0;
sum1 = sum((0:255).*histogramCounts);
for ii=1:256
wB = wB + histogramCounts(ii);
if (wB == 0)
continue;
end
wF = total - wB;
if (wF == 0)
break;
end
sumB = sumB + (ii-1) * histogramCounts(ii);
mB = sumB / wB;
mF = (sum1 - sumB) / wF;
between = wB * wF * (mB - mF) * (mB - mF);
if ( between >= maximum )
level = ii;
maximum = between;
end
end
end
Matlab have built-in functions graythresh() and multithresh() in Image Processing Toolbox which are implemented with Otsu's method and Multi Otsu's method, respectively.
Another approach with vectorized method (could be easily converted into python matrix-array version for GPU processing)
function [threshold_otsu] = Thresholding_Otsu( Image)
%Intuition:
%(1)pixels are divided into two groups
%(2)pixels within each group are very similar to each other
% Parameters:
% t : threshold
% r : pixel value ranging from 1 to 255
% q_L, q_H : the number of lower and higher group respectively
% sigma : group variance
% miu : group mean
% Author: Lei Wang
% Date : 22/09/2013
% References : Wikepedia,
% for multi children Otsu method, please visit : https://drive.google.com/file/d/0BxbR2jt9XyxteF9fZ0NDQ0dKQkU/view?usp=sharing
% This is my original work
nbins = 256;
counts = imhist(Image,nbins);
p = counts / sum(counts);
for t = 1 : nbins
q_L = sum(p(1 : t));
q_H = sum(p(t + 1 : end));
miu_L = sum(p(1 : t) .* (1 : t)') / q_L;
miu_H = sum(p(t + 1 : end) .* (t + 1 : nbins)') / q_H;
sigma_b(t) = q_L * q_H * (miu_L - miu_H)^2;
end
[~,threshold_otsu] = max(sigma_b(:));
end
The implementation has a little redundancy of computation. But since Otsu method is fast, the implementation is acceptable and easy to understand. While in some environment, since we employ vectorisation form, loop computation might be faster. This method can be easily converted to multi-threshould method, with architecture minimum heap—children labels.
JavaScript implementation
Variant 1
NB: The input argument total is the number of pixels in the given image. The input argument histogram is a 256-element histogram of a grayscale image different gray-levels (typical for 8-bit images). This function outputs the threshold for the image.
function otsu(histogram, total) {
var sum = 0;
for (var i = 1; i < 256; ++i)
sum += i * histogram[i];
var sumB = 0;
var wB = 0;
var wF = 0;
var mB;
var mF;
var max = 0.0;
var between = 0.0;
var threshold1 = 0.0;
var threshold2 = 0.0;
for (var i = 0; i < 256; ++i) {
wB += histogram[i];
if (wB == 0)
continue;
wF = total - wB;
if (wF == 0)
break;
sumB += i * histogram[i];
mB = sumB / wB;
mF = (sum - sumB) / wF;
between = wB * wF * (mB - mF) * (mB - mF);
if ( between >= max ) {
threshold1 = i;
if ( between > max ) {
threshold2 = i;
}
max = between;
}
}
return ( threshold1 + threshold2 ) / 2.0;
}
Variant 2
function otsu(histogram, pixelsNumber) {
var sum = 0
, sumB = 0
, wB = 0
, wF = 0
, mB
, mF
, max = 0
, between
, threshold = 0;
for (var i = 0; i < 256; ++i) {
wB += histogram[i];
if (wB == 0)
continue;
wF = pixelsNumber - wB;
if (wF == 0)
break;
sumB += i * histogram[i];
mB = sumB / wB;
mF = (sum - sumB) / wF;
between = wB * wF * Math.pow(mB - mF, 2);
if (between > max) {
max = between;
threshold = i;
}
}
return threshold;
}
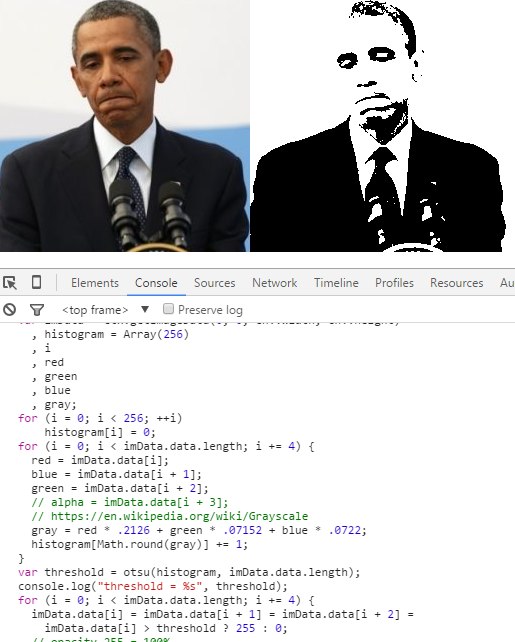
// To test: open any image in browser and run code in console
var im = document.getElementsByTagName('img')[0]
, cnv = document.createElement('canvas')
, ctx = cnv.getContext('2d');
cnv.width = im.width;
cnv.height = im.height;
ctx.drawImage(im, 0, 0);
var imData = ctx.getImageData(0, 0, cnv.width, cnv.height)
, histogram = Array(256)
, i
, red
, green
, blue
, gray;
for (i = 0; i < 256; ++i)
histogram[i] = 0;
for (i = 0; i < imData.data.length; i += 4) {
red = imData.data[i];
blue = imData.data[i + 1];
green = imData.data[i + 2];
// alpha = imData.data[i + 3];
// https://en.wikipedia.org/wiki/Grayscale
gray = red * .2126 + green * .07152 + blue * .0722;
histogram[Math.round(gray)] += 1;
}
var threshold = otsu(histogram, imData.data.length / 4);
console.log("threshold = %s", threshold);
for (i = 0; i < imData.data.length; i += 4) {
imData.data[i] = imData.data[i + 1] = imData.data[i + 2] =
imData.data[i] >= threshold ? 255 : 0;
// opacity 255 = 100%
imData.data[i + 3] = 255;
}
ctx.putImageData(imData, 0, 0);
document.body.appendChild(cnv);
console.log("finished");
Limitations
Otsu’s method exhibits the relatively good performance if the histogram can be assumed to have bimodal distribution and assumed to possess a deep and sharp valley between two peaks. But if the object area is small compared with the background area, the histogram no longer exhibits bimodality.[4] And if the variances of the object and the background intensities are large compared to the mean difference, or the image is severely corrupted by additive noise, the sharp valley of the gray level histogram is degraded. Then the possibly incorrect threshold determined by Otsu’s method results in the segmentation error. (Here we define the object size to be the ratio of the object area to the entire image area and the mean difference to be the difference of the average intensities of the object and the background)
From the experimental results, the performance of global thresholding techniques including Otsu’s method is shown to be limited by the small object size, the small mean difference, the large variances of the object and the background intensities, the large amount of noise added, and so on.[5]
Improvements
There are many improvements focusing on different limitations for Otsu's method.[6] One famous and effective way is known as two-dimensional Otsu's method. In this approach, the gray-level value of each pixel as well as the average value of its immediate neighborhood is studied so that the binarization results are greatly improved, especially for those image corrupted by noise.[7]
At each pixel, the averagegray-level value of the neighborhood is calculated. Let the gray level of a given picture be divided into values and the average gray level is also divided into the same values. Then a pair is formed: the pixel gray level and the average of the neighborhood. Each pair belongs to a 2-dimensional bin. The total number of bins is obviously  . The total number of occurrence(frequency),
. The total number of occurrence(frequency),  , of a pair
, of a pair divided by the total number of pixels in the image
divided by the total number of pixels in the image  , defines the joint probability mass function in 2-dimensional histogram:
, defines the joint probability mass function in 2-dimensional histogram:
And the 2-dimensional Otsu's method will be developed based on the 2-dimensional histogram as follows.
The probabilities of two classes can be denoted as:
The intensity means value vectors of two classes and total mean vector can be expressed as follows:
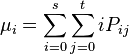
![\mu_0=[\mu_{0i}, \mu_{0j}]^T = \left[\sum_{i=0}^{s-1}\sum_{j=0}^{t-1}iP_{ij}/\omega_0,\sum_{i=0}^{s-1}\sum_{j=0}^{t-1}jP_{ij}/\omega_0\right]^T](../I/m/5fe65727d1f6b94656635d729b062caf.png)
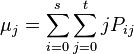
![\mu_1=[\mu_{1i}, \mu_{1j}]^T = \left[\sum_{i=s}^{L-1}\sum_{j=t}^{L-1}iP_{ij}/\omega_1,\sum_{i=s}^{L-1}\sum_{j=t}^{L-1}jP_{ij}/\omega_1\right]^T](../I/m/163cc327963f40910d7df545a319a9a8.png)
![\mu_T=[\mu_{Ti}, \mu_{Tj}]^T = \left[\sum_{i=0}^{L-1}\sum_{j=0}^{L-1}iP_{ij},\sum_{i=0}^{L-1}\sum_{j=0}^{L-1}jP_{ij}\right]^T](../I/m/cd287ee627dc1e171d3702b3487c2085.png)
In most cases, the probability off-diagonal will be negligible so it's easy to verify:


The inter-class discrete matrix is defined as
![S_b = \sum_{k=0}^1\omega_k[(\mu_k-\mu_T)(\mu_k-\mu_T)^T]](../I/m/1b1e8b6bf5bfeaa8bc75e176ddd65e4d.png)
The trace of discrete matrix could be expressed as
![tr(S_b) = \omega_0[(\mu_{0i}-\mu_{Ti})^2+(\mu_{0j}-\mu_{Tj})^2]+\omega_1[(\mu_{1i}-\mu_{Ti})^2+(\mu_{1j}-\mu_{Tj})^2] = \frac{(\mu_{Ti}\omega_0-\mu_i)^2 + (\mu_{Tj}\omega_0-\mu_j)^2}{\omega_0(1-\omega_0)}](../I/m/1973d151737429b56d604ead76a231c1.png)
where
{kind=link}
Similar to one-dimensional Otsu's method, the optimal threshold  is obtained by maximizing
is obtained by maximizing  .
.
Algorithm
The  and is obtained iteratively which is similar with one-dimensional Otsu's method. The values of and are changed till we obtain the maximum of , that is
and is obtained iteratively which is similar with one-dimensional Otsu's method. The values of and are changed till we obtain the maximum of , that is
max,s,t = 0;
for ss: 0 to L-1 do
for tt: 0 to L-1 do
evaluate tr(S_b);
if tr(S_b) > max
max = tr(S,b);
s = ss;
t = tt;
end if
end for
end for
return s,t;
Notice that for evaluating , we can use a fast recursive dynamic programming algorithm to improve time performace.[8] However, even with the dynamic programming approach, 2d Otsu's method still has large time complexity. Therefore, many researches have been done to reduce the computation cost.[9]
Matlab Implementation
function inputs and output:
hists is a  2D-histogram of grayscale value and neighborhood average grayscale value pair.
2D-histogram of grayscale value and neighborhood average grayscale value pair.
total is the number of pairs in the given image.
threshold is the threshold obtained.
function threshold = 2D_otsu(hists, total)
maximum = 0.0;
threshold = 0;
helperVec = 0:255;
mu_t0 = sum(sum(repmat(helperVec',1,256).*hists));
mu_t1 = sum(sum(repmat(helperVec,256,1).*hists));
p_0 = zeros(256);
mu_i = p_0;
mu_j = p_0;
for ii = 1:256
for jj = 1:256
if jj == 1
if ii == 1
p_0(1,1) = hists(1,1);
else
p_0(ii,1) = p_0(ii-1,1) + hists(ii,1);
mu_i(ii,1) = mu_i(ii-1,1)+(ii-1)*hists(ii,1);
mu_j(ii,1) = mu_j(ii-1,1);
end
else
p_0(ii,jj) = p_0(ii,jj-1)+p_0(ii-1,jj)-p_0(ii-1,jj-1)+hists(ii,jj);
mu_i(ii,jj) = mu_i(ii,jj-1)+mu_i(ii-1,jj)-mu_i(ii-1,jj-1)+(ii-1)*hists(ii,jj);
mu_j(ii,jj) = mu_j(ii,jj-1)+mu_j(ii-1,jj)-mu_j(ii-1,jj-1)+(jj-1)*hists(ii,jj);
end
if (p_0(ii,jj) == 0)
continue;
end
if (p_0(ii,jj) == total)
break;
end
tr = ((mu_i(ii,jj)-p_0(ii,jj)*mu_t0)^2 + (mu_j(ii,jj)-p_0(ii,jj)*mu_t0)^2)/(p_0(ii,jj)*(1-p_0(ii,jj)));
if ( tr >= maximum )
threshold = ii;
maximum = tr;
end
end
end
end
References
- ↑ M. Sezgin and B. Sankur (2004). "Survey over image thresholding techniques and quantitative performance evaluation". Journal of Electronic Imaging 13 (1): 146–165. doi:10.1117/1.1631315.
- 1 2 Nobuyuki Otsu (1979). "A threshold selection method from gray-level histograms". IEEE Trans. Sys., Man., Cyber. 9 (1): 62–66. doi:10.1109/TSMC.1979.4310076.
- ↑ Ping-Sung Liao and Tse-Sheng Chen and Pau-Choo Chung (2001). "A Fast Algorithm for Multilevel Thresholding". J. Inf. Sci. Eng. 17 (5): 713–727.
- ↑ Kittler, Josef and Illingworth, John (1985). "On threshold selection using clustering criteria". Systems, Man and Cybernetics, IEEE Transactions on. SMC-15 (5): 652–655.
- ↑ Lee, Sang Uk and Chung, Seok Yoon and Park, Rae Hong (1990). "A comparative performance study of several global thresholding techniques for segmentation". Computer Vision, Graphics, and Image Processing 52 (2): 171–190.
- ↑ Vala, HJ and Baxi, Astha (2013). "A review on Otsu image segmentation algorithm". International Journal of Advanced Research in Computer Engineering \& Technology (IJARCET) 2 (2): 387.
- ↑ Jianzhuang, Liu and Wenqing, Li and Yupeng, Tian (1991). "Automatic thresholding of gray-level pictures using two-dimension Otsu method". Circuits and Systems, 1991. Conference Proceedings, China., 1991 International Conference on: 325–327.
- ↑ Zhang, Jun and Hu, Jinglu (2008). "Image segmentation based on 2D Otsu method with histogram analysis". Computer Science and Software Engineering, 2008 International Conference on 6: 105–108.
- ↑ Zhu, Ningbo and Wang, Gang and Yang, Gaobo and Dai, Weiming (2009). "A fast 2d otsu thresholding algorithm based on improved histogram". Pattern Recognition, 2009. CCPR 2009. Chinese Conference on: 1–5.
External links
- Lecture notes on thresholding – covers the Otsu method.
- A plugin for ImageJ using Otsu's method to do the threshold.
- A full explanation of Otsu's method with a working example and Java implementation.
- Implementation of Otsu's method in ITK
- Otsu Thresholding in C# A straightforward C# implementation with explanation.
- Otsu's method using MATLAB
- Otsu Thresholding Explained Graphical example of how Otsu's method works.