Jordan matrix
In the mathematical discipline of matrix theory, a Jordan block over a ring  (whose identities are the zero 0 and one 1) is a matrix composed of 0 elements everywhere except for the diagonal, which is filled with a fixed element
(whose identities are the zero 0 and one 1) is a matrix composed of 0 elements everywhere except for the diagonal, which is filled with a fixed element  , and for the superdiagonal, which is composed of ones. The concept is named after Camille Jordan.
, and for the superdiagonal, which is composed of ones. The concept is named after Camille Jordan.
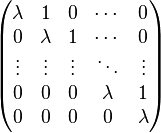
Every Jordan block is thus specified by its dimension n and its eigenvalue  and is indicated as
and is indicated as  .
Any block diagonal matrix whose blocks are Jordan blocks is called a Jordan matrix; using either the
.
Any block diagonal matrix whose blocks are Jordan blocks is called a Jordan matrix; using either the  or the “
or the “ ” symbol, the
” symbol, the  block diagonal square matrix whose first diagonal block is
block diagonal square matrix whose first diagonal block is  , whose second diagonal block is
, whose second diagonal block is  and whose third diagonal block is
and whose third diagonal block is  is compactly indicated as
is compactly indicated as  or
or  , respectively.
For example the matrix
, respectively.
For example the matrix
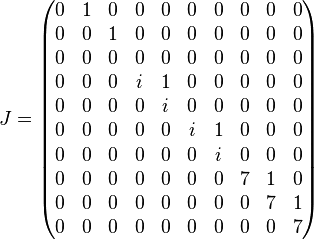
is a  Jordan matrix with a
Jordan matrix with a  block with eigenvalue
block with eigenvalue  , two
, two  blocks with eigenvalue the imaginary unit and a block with eigenvalue 7. Its Jordan-block structure can also be written as either
blocks with eigenvalue the imaginary unit and a block with eigenvalue 7. Its Jordan-block structure can also be written as either  or
or  .
.
Linear algebra
Any  square matrix
square matrix  whose elements are in an algebraically closed field
whose elements are in an algebraically closed field  is similar to a Jordan matrix
is similar to a Jordan matrix  , also in
, also in  , which is unique up to a permutation of its diagonal blocks themselves. is called the Jordan normal form of and corresponds to a generalization of the diagonalization procedure.[1][2][3] A diagonalizable matrix is similar, in fact, to a special case of Jordan matrix: the matrix whose blocks are all
, which is unique up to a permutation of its diagonal blocks themselves. is called the Jordan normal form of and corresponds to a generalization of the diagonalization procedure.[1][2][3] A diagonalizable matrix is similar, in fact, to a special case of Jordan matrix: the matrix whose blocks are all  .[4][5][6]
.[4][5][6]
More generally, given a Jordan matrix  , i.e. whose
, i.e. whose  diagonal block,
diagonal block,  is the Jordan block
is the Jordan block  and whose diagonal elements
and whose diagonal elements  may not all be distinct, the geometric multiplicity of
may not all be distinct, the geometric multiplicity of  for the matrix , indicated as
for the matrix , indicated as  , corresponds to the number of Jordan blocks whose eigenvalue is . Whereas the index of an eigenvalue for , indicated as
, corresponds to the number of Jordan blocks whose eigenvalue is . Whereas the index of an eigenvalue for , indicated as  , is defined as the dimension of the largest Jordan block associated to that eigenvalue.
, is defined as the dimension of the largest Jordan block associated to that eigenvalue.
The same goes for all the matrices similar to , so  can be defined accordingly with respect to the Jordan normal form of for any of its eigenvalues
can be defined accordingly with respect to the Jordan normal form of for any of its eigenvalues  . In this case one can check that the index of for is equal to its multiplicity as a root of the minimal polynomial of (whereas, by definition, its algebraic multiplicity for ,
. In this case one can check that the index of for is equal to its multiplicity as a root of the minimal polynomial of (whereas, by definition, its algebraic multiplicity for ,  , is its multiplicity as a root of the characteristic polynomial of , i.e.
, is its multiplicity as a root of the characteristic polynomial of , i.e. ![\det(A-xI)\in K[x]](../I/m/9a7d73a8d99760e4368a683856e0994f.png) ).
An equivalent necessary and sufficient condition for to be diagonalizable in is that all of its eigenvalues have index equal to
).
An equivalent necessary and sufficient condition for to be diagonalizable in is that all of its eigenvalues have index equal to  , i.e. its minimal polynomial has only simple roots.
, i.e. its minimal polynomial has only simple roots.
Note that knowing a matrix's spectrum with all of its algebraic/geometric multiplicities and indexes does not always allow for the computation of its Jordan normal form (this may be a sufficient condition only for spectrally simple, usually low-dimensional matrices): the Jordan decomposition is, in general, a computationally challenging task. From the vector space point of view, the Jordan decomposition is equivalent to finding an orthogonal decomposition (i.e. via direct sums of eigenspaces represented by Jordan blocks) of the domain which the associated generalized eigenvectors make a basis for.
Functions of matrices
Let  (i.e. a complex matrix) and
(i.e. a complex matrix) and  be the change of basis matrix to the Jordan normal form of , i.e.
be the change of basis matrix to the Jordan normal form of , i.e.  .
Now let
.
Now let  be a holomorphic function on an open set
be a holomorphic function on an open set  such that
such that  , i.e. the spectrum of the matrix is contained inside the domain of holomorphy of
, i.e. the spectrum of the matrix is contained inside the domain of holomorphy of  . Let
. Let
be the power series expansion of around  , which will be hereinafter supposed to be 0 for simplicity's sake. The matrix
, which will be hereinafter supposed to be 0 for simplicity's sake. The matrix  is then defined via the following formal power series
is then defined via the following formal power series
is absolutely convergent with respect to the Euclidean norm of  . To put it another way,
. To put it another way,  converges absolutely for every square matrix whose spectral radius is less than the radius of convergence of around and is uniformly convergent on any compact subsets of satisfying this property in the matrix Lie group topology.
converges absolutely for every square matrix whose spectral radius is less than the radius of convergence of around and is uniformly convergent on any compact subsets of satisfying this property in the matrix Lie group topology.
The Jordan normal form allows the computation of functions of matrices without explicitly computing an infinite series, which is one of the main achievements of Jordan matrices. Using the facts that the  power (
power ( ) of a diagonal block matrix is the diagonal block matrix whose blocks are the powers of the respective blocks, i.e.
) of a diagonal block matrix is the diagonal block matrix whose blocks are the powers of the respective blocks, i.e.  , and that
, and that  , the above matrix power series becomes
, the above matrix power series becomes

where the last series must not be computed explicitly via power series of every Jordan block. In fact, if  , any holomorphic function of a Jordan block
, any holomorphic function of a Jordan block  is the following upper triangular matrix:
is the following upper triangular matrix:
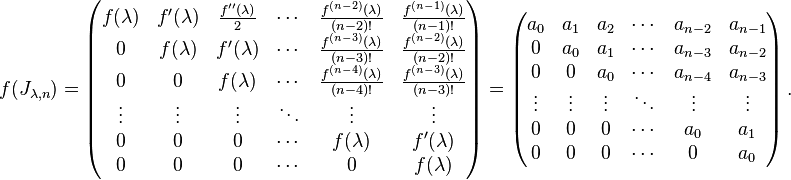
As a consequence of this, the computation of any functions of a matrix is straightforward whenever its Jordan normal form and its change-of-basis matrix are known.
Also,  , i.e. every eigenvalue corresponds to the eigenvalue
, i.e. every eigenvalue corresponds to the eigenvalue  , but it has, in general, different algebraic multiplicity, geometric multiplicity and index. However, the algebraic multiplicity may be computed as follows:
, but it has, in general, different algebraic multiplicity, geometric multiplicity and index. However, the algebraic multiplicity may be computed as follows:

The function  of a linear transformation
of a linear transformation  between vector spaces can be defined in a similar way according to the holomorphic functional calculus, where Banach space and Riemann surface theories play a fundamental role. In the case of finite-dimensional spaces, both theories perfectly match.
between vector spaces can be defined in a similar way according to the holomorphic functional calculus, where Banach space and Riemann surface theories play a fundamental role. In the case of finite-dimensional spaces, both theories perfectly match.
Dynamical systems
Now suppose a (complex) dynamical system is simply defined by the equation


where  is the (
is the ( -dimensional) curve parametrization of an orbit on the Riemann surface
-dimensional) curve parametrization of an orbit on the Riemann surface  of the dynamical system, whereas
of the dynamical system, whereas  is an complex matrix whose elements are complex functions of a
is an complex matrix whose elements are complex functions of a  -dimensional parameter
-dimensional parameter  .
Even if
.
Even if  (i.e. continuously depends on the parameter
(i.e. continuously depends on the parameter  ) the Jordan normal form of the matrix is continuously deformed almost everywhere on
) the Jordan normal form of the matrix is continuously deformed almost everywhere on  but, in general, not everywhere: there is some critical submanifold of on which the Jordan form abruptly changes its structure whenever the parameter crosses or simply “travels” around it (monodromy). Such changes mean that several Jordan blocks (either belonging to different eigenvalues or not) join together to a unique Jordan block, or vice versa (i.e. one Jordan block splits into two or more different ones).
Many aspects of bifurcation theory for both continuous and discrete dynamical systems can be interpreted with the analysis of functional Jordan matrices.
but, in general, not everywhere: there is some critical submanifold of on which the Jordan form abruptly changes its structure whenever the parameter crosses or simply “travels” around it (monodromy). Such changes mean that several Jordan blocks (either belonging to different eigenvalues or not) join together to a unique Jordan block, or vice versa (i.e. one Jordan block splits into two or more different ones).
Many aspects of bifurcation theory for both continuous and discrete dynamical systems can be interpreted with the analysis of functional Jordan matrices.
From the tangent space dynamics, this means that the orthogonal decomposition of the dynamical system's phase space changes and, for example, different orbits gain periodicity, or lose it, or shift from a certain kind of periodicity to another (such as period-doubling, cfr. logistic map).
In a sentence, the qualitative behaviour of such a dynamical system may substantially change as the versal deformation of the Jordan normal form of .
Linear ordinary differential equations
The simplest example of a dynamical system is a system of linear, constant-coefficient, ordinary differential equations, i.e. let and  :
:


whose direct closed-form solution involves computation of the matrix exponential:
Another way, provided the solution is restricted to the local Lebesgue space of -dimensional vector fields  , is to use its Laplace transform
, is to use its Laplace transform ](../I/m/f753b474f9a25059f1fce17be04152f7.png) . In this case
. In this case

The matrix function  is called the resolvent matrix of the differential operator
is called the resolvent matrix of the differential operator  . It is meromorphic with respect to the complex parameter
. It is meromorphic with respect to the complex parameter  since its matrix elements are rational functions whose denominator is equal for all to
since its matrix elements are rational functions whose denominator is equal for all to  . Its polar singularities are the eigenvalues of , whose order equals their index for it, i.e.
. Its polar singularities are the eigenvalues of , whose order equals their index for it, i.e.  .
.
See also
- Jordan decomposition
- Jordan normal form
- Holomorphic functional calculus
- Matrix exponential
- Logarithm of a matrix
- Dynamical system
- Bifurcation theory
- State space (controls)
Notes
- ↑ Beauregard & Fraleigh (1973, pp. 310-316)
- ↑ Golub & Van Loan (1996, p. 317)
- ↑ Nering (1970, pp. 118-127)
- ↑ Beauregard & Fraleigh (1973, pp. 270-274)
- ↑ Golub & Van Loan (1996, p. 316)
- ↑ Nering (1970, pp. 113-118)
References
- Beauregard, Raymond A.; Fraleigh, John B. (1973), A First Course In Linear Algebra: with Optional Introduction to Groups, Rings, and Fields, Boston: Houghton Mifflin Co., ISBN 0-395-14017-X
- Golub, Gene H.; Van Loan, Charles F. (1996), Matrix Computations (3rd ed.), Baltimore: Johns Hopkins University Press, ISBN 0-8018-5414-8
- Nering, Evar D. (1970), Linear Algebra and Matrix Theory (2nd ed.), New York: Wiley, LCCN 76091646