Parallel axis theorem
In physics, the parallel axis theorem, also known as Huygens–Steiner theorem, or just as Steiner's theorem,[1] after Christiaan Huygens and Jakob Steiner, can be used to determine the mass moment of inertia or the second moment of area of a rigid body about any axis, given the body's moment of inertia about a parallel axis through the object's center of gravity and the perpendicular distance between the axes.
Mass moment of inertia
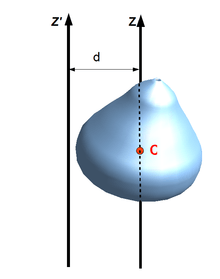
Suppose a body of mass m is made to rotate about an axis z passing through the body's center of gravity. The body has a moment of inertia Icm with respect to this axis. The parallel axis theorem states that if the body is made to rotate instead about a new axis z′ which is parallel to the first axis and displaced from it by a distance d, then the moment of inertia I with respect to the new axis is related to Icm by

Explicitly, d is the perpendicular distance between the axes z and z′.
The parallel axis theorem can be applied with the stretch rule and perpendicular axis theorem to find moments of inertia for a variety of shapes.

Derivation
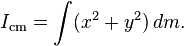
We may assume, without loss of generality, that in a Cartesian coordinate system the perpendicular distance between the axes lies along the x-axis and that the center of gravity lies at the origin. The moment of inertia relative to the z-axis is
The moment of inertia relative to the axis z′, which is a perpendicular distance r along the x-axis from the center of mass, is
![I = \int \left[(x + r)^2 + y^2\right] \, dm](../I/m/81b62d60cf6107026c6652136ad070e4.png)
Expanding the brackets yields

The first term is Icm and the second term becomes mr2. The integral in the final term is the x-coordinate of the center of mass, which is zero by construction. So, the equation becomes:

Tensor generalization
The parallel axis theorem can be generalized to calculations involving the inertia tensor. Let Iij denote the inertia tensor of a body as calculated at the center of mass. Then the inertia tensor Jij as calculated relative to a new point is

where  is the displacement vector from the center of mass to the new point, and δij is the Kronecker delta.
is the displacement vector from the center of mass to the new point, and δij is the Kronecker delta.
For diagonal elements (when i = j), displacements perpendicular to the axis of rotation results in the above simplified version of the parallel axis theorem.
The generalized version of the parallel axis theorem can be expressed in coordinate-free notation as
![\mathbf{J} = \mathbf{I} + m \left[\left(\mathbf{R} \cdot \mathbf{R}\right) \mathbf{E}_{3} - \mathbf{R} \otimes \mathbf{R} \right],](../I/m/28805d356ae7c95bde3031ac7c6f5696.png)
where E3 is the 3 × 3 identity matrix and  is the outer product.
is the outer product.
Area moment of inertia
The parallel axes rule also applies to the second moment of area (area moment of inertia) for a plane region D:

where Iz is the area moment of inertia of D relative to the parallel axis, Ix is the area moment of inertia of D relative to its centroid, A is the area of the plane region D, and r is the distance from the new axis z to the centroid of the plane region D. The centroid of D coincides with the centre of gravity of a physical plate with the same shape that has uniform density.
Polar moment of inertia for planar dynamics
The mass properties of a rigid body that is constrained to move parallel to a plane are defined by its center of mass R = (x, y) in this plane, and its polar moment of inertia IR around an axis through R that is perpendicular to the plane. The parallel axis theorem provides a convenient relationship between the moment of inertia IS around an arbitrary point S and the moment of inertia IR about the center of mass R.
Recall that the center of mass R has the property
where r is integrated over the volume V of the body. The polar moment of inertia of a body undergoing planar movement can be computed relative to any reference point S,

where S is constant and r is integrated over the volume V.
In order to obtain the moment of inertia IS in terms of the moment of inertia IR, introduce the vector d from S to the center of mass R,

The first term is the moment of inertia IR, the second term is zero by definition of the center of mass, and the last term is the total mass of the body times the square magnitude of the vector d. Thus,

which is known as the parallel axis theorem.[2]
Moment of inertia matrix
The inertia matrix of a rigid system of particles depends on the choice of the reference point. There is a useful relationship between the inertia matrix relative to the center of mass R and the inertia matrix relative to another point S. This relationship is called the parallel axis theorem.
Consider the inertia matrix [IS] obtained for a rigid system of particles measured relative to a reference point S, given by
![[I_S] = -\sum_{i=1}^n m_i[r_i-S][r_i-S],](../I/m/56033e3e2b55a6a3edc4cbd82ed8448d.png)
where ri defines the position of particle Pi, i = 1, ..., n. Recall that [ri − S] is the skew-symmetric matrix that performs the cross product,
![[r_i -S]\mathbf{y} = (\mathbf{r}_i - \mathbf{S})\times \mathbf{y},](../I/m/f4c285229b80f3bd34cfa3150c97070e.png)
for an arbitrary vector y.
Let R be the center of mass of the rigid system, then

where d is the vector from the reference point S to the center of mass R. Use this equation to compute the inertia matrix,
![[I_S] = -\sum_{i=1}^n m_i[r_i- R + d][r_i - R+ d].](../I/m/37ed065be11f2eb9d27247a9d493bccb.png)
Expand this equation to obtain
![[I_S] = \left(-\sum_{i=1}^n m_i [r_i - R][r_i - R]\right) + \left(-\sum_{i=1}^n m_i[r_i - R]\right)[d] + [d]\left(-\sum_{i=1}^n m_i[r_i - R]\right) + \left(-\sum_{i=1}^n m_i\right)[d][d].](../I/m/6c70b0a0ea1184ecb163d820b95dff6a.png)
The first term is the inertia matrix [IR] relative to the center of mass. The second and third terms are zero by definition of the center of mass R,
And the last term is the total mass of the system multiplied by the square of the skew-symmetric matrix [d] constructed from d.
The result is the parallel axis theorem,
![[I_S] = [I_R] - M[d]^2,](../I/m/e84b12458706b535d7dbf195c0becc6a.png)
where d is the vector from the reference point S to the center of mass R.[3]
Identities for a skew-symmetric matrix
In order to compare formulations of the parallel axis theorem using skew-symmetric matrices and the tensor formulation, the following identities are useful.
Let [R] be the skew symmetric matrix associated with the position vector R = (x, y, z), then the product in the inertia matrix becomes
![-[R][R]= -\begin{bmatrix} 0 & -z & y \\ z & 0 & -x \\ -y & x & 0 \end{bmatrix}^2 = \begin{bmatrix}
y^2+z^2 & -xy & -xz \\ -y x & x^2+z^2 & -yz \\ -zx & -zy & x^2+y^2 \end{bmatrix}.](../I/m/26f0852e9f1cdba1713edef8025d3b08.png)
This product can be computed using the matrix formed by the outer product [R RT] using the identify
![-[R]^2 = |\mathbf{R}|^2[E_3] -[\mathbf{R}\mathbf{R}^T]=
\begin{bmatrix} x^2+y^2+z^2 & 0 & 0 \\ 0& x^2+y^2+z^2 & 0 \\0& 0& x^2+y^2+z^2 \end{bmatrix}- \begin{bmatrix}x^2 & xy & xz \\ yx & y^2 & yz \\ zx & zy & z^2\end{bmatrix},](../I/m/5e0989ca170e65424540d86b5d40fc58.png)
where [E3] is the 3 × 3 identify matrix.
Also notice, that
![|\mathbf{R}|^2 = \mathbf{R}\cdot\mathbf{R} =\operatorname{tr}[\mathbf{R}\mathbf{R}^T],](../I/m/71a3a6cbb513b8999a19118b6a4d8a68.png)
where tr denotes the sum of the diagonal elements of the outer product matrix, known as its trace.
See also
- Moment of inertia
- Perpendicular axis theorem
- Stretch rule
- Jakob Steiner
- Christiaan Huygens
- Rigid body dynamics
References
- ↑ Arthur Erich Haas (1928). Introduction to theoretical physics.
- ↑ Paul, Burton (1979), Kinematics and Dynamics of Planar Machinery, Prentice Hall, ISBN 978-0-13-516062-6
- ↑ T. R. Kane and D. A. Levinson, Dynamics, Theory and Applications, McGraw-Hill, NY, 2005.