Heterogeneous System Architecture
Heterogeneous System Architecture (HSA) is a cross-vendor set of specifications that allow for the integration of central processing units and graphics processors on the same bus, with shared memory and tasks.[1] The HSA is being developed by the HSA Foundation, which includes (among many others) AMD and ARM. The platform's stated aim is to reduce communication latency between CPUs, GPUs and other compute devices, and make these various devices more compatible from a programmer's perspective,[2]:3[3] relieving the programmer of the task of planning the moving of data between devices' disjoint memories (as must currently be done with OpenCL or CUDA).[4]
Cuda and OpenCL as well as most other fairly advanced programming languages can use HSA to increase their execution performance.[5] Heterogeneous computing is widely used in system-on-chip devices, such as tablets, smartphones, and other mobile devices.[6] HSA allows programs to use the graphics processor for floating point calculations without separate memory or scheduling.[7]
Rationale
The rationale behind HSA is to ease the burden on programmers when offloading calculations to the GPU. Originally driven solely by AMD and called the FSA, the idea was extended to encompass processing units other then GPUs, e.g. the wide-spread DSPs by other hardware design companies as well.
|
Modern GPUs are very well suited to perform Single instruction, multiple data (SIMD) and Single instruction, multiple threads (SIMT), while modern CPUs are still being optimized for branching. etc.
Overview
Originally introduced by the Cell Broadband Engine, sharing system memory directly between multiple system actors makes heterogeneous computing more mainstream. Heterogeneous computing itself refers to systems that contain multiple processing units – central processing units (CPUs), graphics processing units (GPUs), digital signal processors (DSPs), or any type of application-specific integrated circuits (ASICs). The system architecture allows any accelerator, for instance a graphics processor, to operate at the same processing level as the system's CPU.
Among its main features, HSA defines a unified virtual address space space for compute devices: where GPUs traditionally have their own memory, separate from the main (CPU) memory, HSA requires these devices to share page tables so that devices can exchange data by sharing pointers. This is to be supported by custom memory management units.[2]:6–7 To render interoperability possible and also to ease various aspects of programming, HSA is intended to be ISA-agnostic for both CPUs and accelerators, and to support high-level programming languages.
So far, the HSA specifications cover:
- HSA Intermediate Layer (HSAIL), a virtual instruction set for parallel programs
- similar to LLVM Intermediate Representation and SPIR (used by OpenCL and Vulkan)
- finalized to a specific instruction set by a JIT compiler
- make late decisions on which core(s) should run a task
- explicitly parallel
- supports exceptions, virtual functions and other high-level features
- syscall methods (I/O, printf, etc.)
- debugging support
- HSA memory model
- compatible with C++11, OpenCL, Java and .NET memory models
- relaxed consistency
- designed to support both managed languages (e.g. Java) and unmanaged languages (e.g. C)
- will make it much easier to develop 3rd-party compilers for a wide range of heterogeneous products programmed in Fortran, C++, C++ AMP, Java, et al.
- HSA dispatcher and run-time
- designed to enable heterogeneous task queueing: a work queue per core, distribution of work into queues, load balancing by work stealing
- any core can schedule work for any other, including itself
- significant reduction of overhead of scheduling work for a core
Mobile devices are one of the HSA's application areas, in which it yields improved power efficiency.[6]
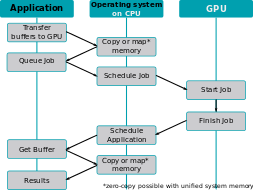
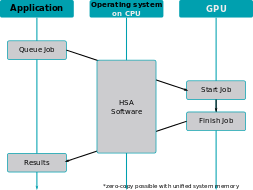
Block diagrams
The block diagrams below provide high-level illustrations of how HSA operates and how it compares to traditional architectures.
|





Software support

Some of the HSA-specific features implemented in the hardware need to be supported by the operating system kernel and specific device drivers. For example, support for AMD Radeon and AMD FirePro graphics cards, and APUs based on so-called Graphics Core Next (GCN), was merged into version 3.19 of the Linux kernel mainline, released on February 8, 2015.[10] Programs do not interact directly with amdkfd, but queue their jobs utilizing the HSA runtime.[11] This very first implementation, known as amdkfd, focuses on "Kaveri" or "Berlin" APUs and works alongside the existing Radeon kernel graphics driver.
Additionally, amdkfd supports heterogeneous queuing (HQ), which aims to simplify the distribution of computational jobs among multiple CPUs and GPUs from the programmer's perspective. As of February 2015, support for heterogeneous memory management, suited only for graphics hardware featuring version 2 of the AMD's IOMMU, has not yet been accepted into the Linux kernel mainline.
Integrated support for HSA platforms has been announced for the "Sumatra" release of OpenJDK, due in 2015.[12]
AMD APP SDK is AMD's proprietary software development kit targeting parallel computing, available for Microsoft Windows and Linux. Bolt is a C++ template library optimized for heterogeneous computing.[13]
GPUOpen comprehends a couple of other software tools related to HSA.
Hardware support
As of February 2015, only AMD's "Kaveri" A-series APUs (cf. "Kaveri" desktop processors and "Kaveri" mobile processors) and Sony's PlayStation 4 contain version 2 of the AMD's IOMMU.
| Brand | Llano | Trinity | Richland | Kaveri | Carrizo | ? | Desna, Ontario, Zacate | Kabini, Temash | Beema, Mullins | Carrizo-L | |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Platform | Desktop, Mobile | Desktop, Mobile | Mobile | Desktop | Ultra-mobile | ||||||
| Released | Aug 2011 | Oct 2012 | Jun 2013 | Jan 2014 | Jun 2015 | 2016? | Jan 2011 | May 2013 | Q2 2014 | May 2015 | |
| Fab (nm) | GlobalFoundries 32 nm SOI | 28 | 14/16nm | TSMC 40 nm | 28 | ||||||
| Die size (mm2) | 228 | 246 | 245 | 244.62 | ? | 75 (+ 28 FCH) | ~107 | TBA | |||
| Socket | FM1, FS1 | FM2, FS1+, FP2 | FM2+, FP3 | FP4 | AM4 | FT1 | AM1, FT3 | FT3b | FP4 | ||
| CPU architecture | AMD 10h | Piledriver | Steamroller | Excavator | Zen | Bobcat | Jaguar | Puma | Puma+[14] | ||
| Memory support | DDR3-1866 DDR3-1600 DDR3-1333 | DDR3-2133 DDR3-1866 DDR3-1600 DDR3-1333 | ? | DDR3L-1333 DDR3L-1066 | DDR3L-1866 DDR3L-1600 DDR3L-1333 DDR3L-1066 | DDR3L-1866 DDR3L-1600 DDR3L-1333 | |||||
| 3D engine1 | TeraScale 2 (VLIW5) | TeraScale 3 (VLIW4) | GCN 1.1 (Mantle, HSA) | GCN 1.2 | ? | TeraScale 2 (VLIW5) | GCN1.1 | GCN | |||
| 400:20:8 | up to 384:24:6 | up to 512:32:8 | ? | 80:8:4 | 128:8:4 | TBA | |||||
| IOMMUv1 | IOMMUv2 | IOMMUv1 | IOMMUv1[15] | TBA | |||||||
| Unified Video Decoder | UVD 3 | UVD 4.2 | UVD 6 | ? | UVD 3 | UVD 4 | UVD 4.2 | TBA | |||
| Video Coding Engine | N/A | VCE 1.0 | VCE 2.0 | VCE 3.0 | ? | N/A | VCE 2.0 | TBA | |||
| Power saving GPU | PowerPlay | PowerTune | ? | ||||||||
| Max. № of displays2 | 2–3 | 2–4 | 2–4 | 3 | ? | 2 | 2 | TBA | |||
| TrueAudio | N/A | ✔[16] | N/A[15] | TBA | |||||||
| FreeSync | N/A | ✔ | ? | ||||||||
| Direct Rendering Manager / Mesa 3D driver[17][18] |
✔[18] | WIP | ✔ | ||||||||
- 1 Unified shaders : Texture mapping units : Render output units
- 2 To feed more than two displays, the additional panels must have native DisplayPort support.[19] Alternatively active DisplayPort-to-DVI/HDMI/VGA adapters can be employed
See also
| Wikimedia Commons has media related to Heterogeneous System Architecture. |
References
- ↑ Tarun Iyer (30 April 2013). "AMD Unveils its Heterogeneous Uniform Memory Access (hUMA) Technology". Tom's Hardware.
- 1 2 George Kyriazis (30 August 2012). Heterogeneous System Architecture: A Technical Review (PDF) (Report). AMD.
- ↑ "What is Heterogeneous System Architecture (HSA)?". AMD. Retrieved 23 May 2014.
- ↑ Joel Hruska (2013-08-26). "Setting HSAIL: AMD explains the future of CPU/GPU cooperation". ExtremeTech. Ziff Davis.
- ↑ Linaro. "LCE13: Heterogeneous System Architecture (HSA) on ARM". slideshare.net.
- 1 2 "Heterogeneous System Architecture: Purpose and Outlook". gpuscience.com. 2012-11-09. Archived from the original on 2014-02-01. Retrieved 2014-05-24.
- ↑ "Heterogeneous system architecture: Multicore image processing using a mix of CPU and GPU elements". Embedded Computing Design. Retrieved 23 May 2014.
- ↑ "Kaveri microarchitecture". SemiAccurate. 2014-01-15.
- ↑ Michael Larabel (July 21, 2014). "AMDKFD Driver Still Evolving For Open-Source HSA On Linux". Phoronix. Retrieved January 21, 2015.
- 1 2 "Linux kernel 3.19, Section 1.3. HSA driver for AMD GPU devices". kernelnewbies.org. February 8, 2015. Retrieved February 12, 2015.
- ↑ "HSA-Runtime-Reference-Source/README.md at master". github.com. November 14, 2014. Retrieved February 12, 2015.
- ↑ Alex Woodie (26 August 2013). "HSA Foundation Aims to Boost Java’s GPU Prowess". HPCwire.
- ↑ "Bolt on github".
- ↑ "AMD Mobile “Carrizo” Family of APUs Designed to Deliver Significant Leap in Performance, Energy Efficiency in 2015" (Press release). 2014-11-20. Retrieved 2015-02-16.
- 1 2 Thomas De Maesschalck (2013-11-14). "AMD teases Mullins and Beema tablet/convertibles APU". Retrieved 2015-02-24.
- ↑ "A technical look at AMD’s Kaveri architecture". Semi Accurate. Retrieved 6 July 2014.
- ↑ Airlie, David (2009-11-26). "DisplayPort supported by KMS driver mainlined into Linux kernel 2.6.33". Retrieved 2014-07-02.
- 1 2 "Radeon feature matrix". freedesktop.org. Retrieved 2016-01-10.
- ↑ "How do I connect three or More Monitors to an AMD Radeon™ HD 5000, HD 6000, and HD 7000 Series Graphics Card?". AMD. Retrieved 2014-12-08.
External links
- HSA Heterogeneous System Architecture Overview on YouTube by Vinod Tipparaju at SC13 in November 2013
- HSA and the software ecosystem
- 2012 – HSA by Michael Houston