Barycentric coordinate system

In geometry, the barycentric coordinate system is a coordinate system in which the location of a point of a simplex (a triangle, tetrahedron, etc.) is specified as the center of mass, or barycenter, of usually unequal masses placed at its vertices. Coordinates also extend outside the simplex, where one or more coordinates become negative. The system was introduced (1827) by August Ferdinand Möbius.
Definition
Let  be the vertices of a simplex in an affine space A. If, for some point
be the vertices of a simplex in an affine space A. If, for some point  in A,
in A,

and at least one of  does not vanish
then we say that the coefficients () are barycentric coordinates of with respect to . The vertices themselves have the coordinates
does not vanish
then we say that the coefficients () are barycentric coordinates of with respect to . The vertices themselves have the coordinates  . Barycentric coordinates are not unique: for any b not equal to zero, (
. Barycentric coordinates are not unique: for any b not equal to zero, ( ) are also barycentric coordinates of p.
) are also barycentric coordinates of p.
When the coordinates are not negative, the point lies in the convex hull of , that is, in the simplex which has those points as its vertices.
Barycentric coordinates, as defined above, are a form of homogeneous coordinates. Sometimes values of coordinates are restricted with a condition

which makes them unique; then, they are affine coordinates.
Barycentric coordinates on triangles

 on an equilateral triangle and on a right triangle.
on an equilateral triangle and on a right triangle.In the context of a triangle, barycentric coordinates are also known as area coordinates or areal coordinates, because the coordinates of P with respect to triangle ABC are equivalent to the (signed) ratios of the areas of PBC, PCA and PAB to the area of the reference triangle ABC. Areal and trilinear coordinates are used for similar purposes in geometry.
Barycentric or areal coordinates are extremely useful in engineering applications involving triangular subdomains. These make analytic integrals often easier to evaluate, and Gaussian quadrature tables are often presented in terms of area coordinates.
Consider a triangle  defined by its three vertices,
defined by its three vertices,  ,
,  and
and  . Each point
. Each point  located inside this triangle can be written as a unique convex combination of the three vertices. In other words, for each there is a unique sequence of three numbers,
located inside this triangle can be written as a unique convex combination of the three vertices. In other words, for each there is a unique sequence of three numbers,  such that
such that  and
and

The three numbers  indicate the "barycentric" or "area" coordinates of the point with respect to the triangle. They are often denoted as
indicate the "barycentric" or "area" coordinates of the point with respect to the triangle. They are often denoted as  instead of . Note that although there are three coordinates, there are only two degrees of freedom, since . Thus every point is uniquely defined by any two of the barycentric coordinates.
instead of . Note that although there are three coordinates, there are only two degrees of freedom, since . Thus every point is uniquely defined by any two of the barycentric coordinates.
Switching back and forth between the barycentric coordinates and other coordinate systems makes some problems much easier to solve.
Conversion between barycentric and Cartesian coordinates
Given a point  in a triangle's plane one can obtain the barycentric coordinates
in a triangle's plane one can obtain the barycentric coordinates  ,
,  and
and  from the Cartesian coordinates
from the Cartesian coordinates  or vice versa.
or vice versa.
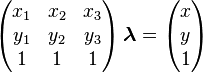
We can write the Cartesian coordinates of the point in terms of the Cartesian components of the triangle vertices  ,
,  ,
,  where
where  and in terms of the barycentric coordinates of as
and in terms of the barycentric coordinates of as
That is, the Cartesian coordinates of any point are a weighted average of the Cartesian coordinates of the triangle's vertices, with the weights being the point's barycentric coordinates summing to unity.
To find the reverse transformation, from Cartesian coordinates to barycentric coordinates, we first substitute  into the above to obtain
into the above to obtain

Rearranging, this is

This linear transformation may be written more succinctly as

where  is the vector of the first two barycentric coordinates, is the vector of Cartesian coordinates, and
is the vector of the first two barycentric coordinates, is the vector of Cartesian coordinates, and  is a matrix given by
is a matrix given by
Now the matrix is invertible, since  and
and  are linearly independent (if this were not the case, then , , and would be collinear and would not form a triangle). Thus, we can rearrange the above equation to get
are linearly independent (if this were not the case, then , , and would be collinear and would not form a triangle). Thus, we can rearrange the above equation to get
Finding the barycentric coordinates has thus been reduced to finding the 2×2 inverse matrix of , an easy problem.
Explicitly, the formulae for the barycentric coordinates of point in terms of its Cartesian coordinates (x, y) and in terms of the Cartesian coordinates of the triangle's vertices are:



Another way to solve the conversion from Cartesian to barycentric coordinates is to rewrite the problem in matrix form so that

with  and
and
 .
Then, the condition
reads
.
Then, the condition
reads  and the barycentric coordinates can be solved as the solution of
the linear system
and the barycentric coordinates can be solved as the solution of
the linear system
Conversion between barycentric and trilinear coordinates
A point with trilinear coordinates x : y : z has barycentric coordinates ax : by : cz where a, b, c are the sidelengths of the triangle. Conversely, a point with barycentrics α : β : γ has trilinears α/a : β/b : γ/c.
Equations in barycentric coordinates
Using the above conversion between barycentric and trilinear coordinates, the various equations given in Trilinear coordinates#Formulas can be rewritten in terms of barycentric coordinates.
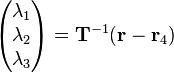
Distance between points
Displacement vector of two normalized points  and
and  is
is

The distance  between
between  and
and  , or length of displacement vector
, or length of displacement vector 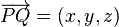 is
is

where a, b, c are the sidelengths of the triangle.
Barycentric coordinates can be calculated based on distances to three triangle vertices by solving the equation
 .
.
Application: Determining location with respect to a triangle
Although barycentric coordinates are most commonly used to handle points inside a triangle, they can also be used to describe a point outside the triangle. If the point is not inside the triangle, then we can still use the formulas above to compute the barycentric coordinates. However, since the point is outside the triangle, at least one of the coordinates will violate our original assumption that  . In fact, given any point in cartesian coordinates, we can use this fact to determine where this point is with respect to a triangle.
. In fact, given any point in cartesian coordinates, we can use this fact to determine where this point is with respect to a triangle.
If a point lies in the interior of the triangle, all of the Barycentric coordinates lie in the open interval  If a point lies on an edge of the triangle but not at a vertex, one of the area coordinates
If a point lies on an edge of the triangle but not at a vertex, one of the area coordinates  (the one associated with the opposite vertex) is zero, while the other two lie in the open interval If the point lies on a vertex, the coordinate associated with that vertex equals 1 and the others equal zero. Finally, if the point lies outside the triangle at least one coordinate is negative.
(the one associated with the opposite vertex) is zero, while the other two lie in the open interval If the point lies on a vertex, the coordinate associated with that vertex equals 1 and the others equal zero. Finally, if the point lies outside the triangle at least one coordinate is negative.
Summarizing,
- Point lies inside the triangle if and only if
 .
. - Otherwise, lies on the edge or corner of the triangle if
 .
. - Otherwise, lies outside the triangle.
In particular, if a point lies on the opposite side of a sideline from the vertex opposite that sideline, then that point's barycentric coordinate corresponding to that vertex is negative.
Application: Interpolation on a triangular unstructured grid
If  are known quantities, but the values of
are known quantities, but the values of  inside the triangle defined by
inside the triangle defined by  is unknown, we can approximate these values using linear interpolation. Barycentric coordinates provide a convenient way to compute this interpolation. If is a point inside the triangle with barycentric coordinates , , , then
is unknown, we can approximate these values using linear interpolation. Barycentric coordinates provide a convenient way to compute this interpolation. If is a point inside the triangle with barycentric coordinates , , , then

In general, given any unstructured grid or polygon mesh, we can use this kind of technique to approximate the value of at all points, as long as the function's value is known at all vertices of the mesh. In this case, we have many triangles, each corresponding to a different part of the space. To interpolate a function at a point , we must first find a triangle that contains it. To do so, we first transform into the barycentric coordinates of each triangle. If we find some triangle such that the coordinates satisfy , then the point lies in that triangle or on its edge (explained in the previous section). We can then interpolate the value of  as described above.
as described above.
These methods have many applications, such as the finite element method (FEM).
Application: Integration over a triangle
The integral of a function over the domain of the triangle can be annoying to compute in a cartesian coordinate system. One generally has to split the triangle up into two halves, and great messiness follows. Instead, it is often easier to make a change of variables to any two barycentric coordinates, e.g.  . Under this change of variables,
. Under this change of variables,

where  is the area of the triangle. This result follows from the fact that a rectangle in barycentric coordinates corresponds to a quadrilateral in cartesian coordinates, and the ratio of the areas of the corresponding shapes in the corresponding coordinate systems is given by
is the area of the triangle. This result follows from the fact that a rectangle in barycentric coordinates corresponds to a quadrilateral in cartesian coordinates, and the ratio of the areas of the corresponding shapes in the corresponding coordinate systems is given by  .
.
Examples of special points
The circumcenter of a triangle ABC has barycentric coordinates[2][3][1]


where a, b, c are edge lengths BC, CA, AB respectively of the triangle.
The orthocenter has barycentric coordinates[1]


The incenter has barycentric coordinates[1]

The nine-point center has barycentric coordinates


Barycentric coordinates on tetrahedra
Barycentric coordinates may be easily extended to three dimensions. The 3D simplex is a tetrahedron, a polyhedron having four triangular faces and four vertices. Once again, the barycentric coordinates are defined so that the first vertex maps to barycentric coordinates  ,
,  , etc.
, etc.
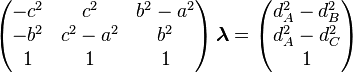
This is again a linear transformation, and we may extend the above procedure for triangles to find the barycentric coordinates of a point with respect to a tetrahedron:
where is now a 3×3 matrix:
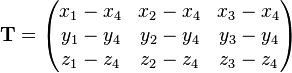
Once again, the problem of finding the barycentric coordinates has been reduced to inverting a 3×3 matrix. 3D barycentric coordinates may be used to decide if a point lies inside a tetrahedral volume, and to interpolate a function within a tetrahedral mesh, in an analogous manner to the 2D procedure. Tetrahedral meshes are often used in finite element analysis because the use of barycentric coordinates can greatly simplify 3D interpolation.
Generalized barycentric coordinates
Barycentric coordinates (a1, ..., an) that are defined with respect to a polytope instead of a simplex are called generalized barycentric coordinates. For these, the equation

is still required to hold where x1, ..., xn are the vertices of the given polytope. Thus, the definition is formally unchanged but while a simplex with n vertices needs to be embedded in a vector space of dimension of at least n-1, a polytope may be embedded in a vector space of lower dimension. The simplest example is a quadrilateral in the plane. Consequently, even normalized generalized barycentric coordinates (i.e. coordinates such that the sum of the coefficients is 1) are in general not uniquely determined anymore while this is the case for normalized barycentric coordinates with respect to a simplex.
More abstractly, generalized barycentric coordinates express a polytope with n vertices, regardless of dimension, as the image of the standard  -simplex, which has n vertices – the map is onto:
-simplex, which has n vertices – the map is onto:  The map is one-to-one if and only if the polytope is a simplex, in which case the map is an isomorphism; this corresponds to a point not having unique generalized barycentric coordinates except when P is a simplex.
The map is one-to-one if and only if the polytope is a simplex, in which case the map is an isomorphism; this corresponds to a point not having unique generalized barycentric coordinates except when P is a simplex.
Dual to generalized barycentric coordinates are slack variables, which measure by how much margin a point satisfies the linear constraints, and gives an embedding  into the f-orthant, where f is the number of faces (dual to the vertices). This map is one-to-one (slack variables are uniquely determined) but not onto (not all combinations can be realized).
into the f-orthant, where f is the number of faces (dual to the vertices). This map is one-to-one (slack variables are uniquely determined) but not onto (not all combinations can be realized).
This use of the standard -simplex and f-orthant as standard objects that map to a polytope or that a polytope maps into should be contrasted with the use of the standard vector space  as the standard object for vector spaces, and the standard affine hyperplane
as the standard object for vector spaces, and the standard affine hyperplane  as the standard object for affine spaces, where in each case choosing a linear basis or affine basis provides an isomorphism, allowing all vector spaces and affine spaces to be thought of in terms of these standard spaces, rather than an onto or one-to-one map (not every polytope is a simplex). Further, the n-orthant is the standard object that maps to cones.
as the standard object for affine spaces, where in each case choosing a linear basis or affine basis provides an isomorphism, allowing all vector spaces and affine spaces to be thought of in terms of these standard spaces, rather than an onto or one-to-one map (not every polytope is a simplex). Further, the n-orthant is the standard object that maps to cones.
Applications
Generalized barycentric coordinates have applications in computer graphics and more specifically in geometric modelling. Often, a three-dimensional model can be approximated by a polyhedron such that the generalized barycentric coordinates with respect to that polyhedron have a geometric meaning. In this way, the processing of the model can be simplified by using these meaningful coordinates.
See also
References
- 1 2 3 4 5 Schindler, Max; Chen, Evan (July 13, 2012). "Barycentric Coordinates in Olympiad Geometry" (PDF). Retrieved 14 January 2016.
- ↑ Wolfram page on barycentric coordinates
- ↑ Clark Kimberling's Encyclopedia of Triangles http://faculty.evansville.edu/ck6/encyclopedia/ETC.html
- Bradley, Christopher J. (2007). The Algebra of Geometry: Cartesian, Areal and Projective Co-ordinates. Bath: Highperception. ISBN 978-1-906338-00-8.
- Coxeter, H.S.M. (1969). Introduction to geometry (2nd ed.). John Wiley and Sons. pp. 216–221. ISBN 978-0-471-50458-0. Zbl 0181.48101.
- Barycentric Calculus In Euclidean And Hyperbolic Geometry: A Comparative Introduction, Abraham Ungar, World Scientific, 2010
- Hyperbolic Barycentric Coordinates, Abraham A. Ungar, The Australian Journal of Mathematical Analysis and Applications, Vol.6, No.1, Article 18, pp. 1-35, 2009
- Weisstein, Eric W., "Areal Coordinates", MathWorld.
- Weisstein, Eric W., "Barycentric Coordinates", MathWorld.
- Barycentric coordinates computation in homogeneous coordinates, Vaclav Skala, Computers and Graphics, Vol.32, No.1, pp. 120-127, 2008
External links
- The uses of homogeneous barycentric coordinates in plane euclidean geometry
- Barycentric Coordinates – a collection of scientific papers about (generalized) barycentric coordinates
- Barycentric coordinates: A Curious Application (solving the "three glasses" problem) at cut-the-knot
- Accurate point in triangle test
- Barycentric Coordinates in Olympiad Geometry by Evan Chen and Max Schindler
- Barycenter command and TriangleCurve command at Geogebra.