Generalizations of Pauli matrices
In mathematics and physics, in particular quantum information, the term generalized Pauli matrices refers to families of matrices which generalize the (linear algebraic) properties of the Pauli matrices. Here, a few classes of such matrices are summarized.
Generalized Gell-Mann matrices (Hermitian)
Construction
Let Ejk be the matrix with 1 in the jk-th entry and 0 elsewhere. Consider the space of d×d complex matrices, ℂd×d, for a fixed d.
Define the following matrices,
- For k < j , fk,jd = Ekj + Ejk .
- For k > j , fk,jd = − i (Ejk − Ekj) .
- Let h1d = Id , the identity matrix.
- For 1 < k < d , hkd =hkd−1⊕ 0 .
- For k = d ,

The collection of matrices defined above without the identity matrix are called the generalized Gell-Mann matrices, in dimension d.[1] The symbol ⊕ (utilized in the Cartan subalgebra above) means matrix direct sum.
The generalized Gell-Mann matrices are Hermitian and traceless by construction, just like the Pauli matrices. One can also check that they are orthogonal in the Hilbert–Schmidt inner product on ℂd×d. By dimension count, one sees that they span the vector space of d × d complex matrices,  (d,ℂ). They then provide a Lie-algebra-generator basis acting on the fundamental representation of
(d,ℂ). They then provide a Lie-algebra-generator basis acting on the fundamental representation of  (d ).
(d ).
In dimensions d=2 and 3, the above construction recovers the Pauli and Gell-Mann matrices, respectively.
A non-Hermitian generalization of Pauli matrices
The Pauli matrices  and
and  satisfy the following:
satisfy the following:

The so-called Walsh–Hadamard conjugation matrix is

Like the Pauli matrices, W is both Hermitian and unitary.  and W satisfy the relation
and W satisfy the relation

The goal now is to extend the above to higher dimensions, d, a problem solved by J. J. Sylvester (1882).
Construction: The clock and shift matrices
Fix the dimension d as before. Let ω = exp(2πi/d), a root of unity. Since ωd = 1 and ω ≠ 1, the sum of all roots annuls:

Integer indices may then be cyclically identified mod d.
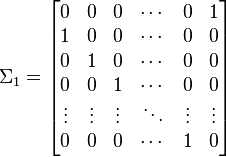
Now define, with Sylvester, the shift matrix[2]
and the clock matrix,
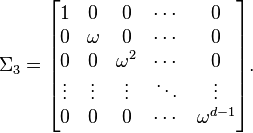
These matrices generalize σ1 and σ3, respectively.
Note that the unitarity and tracelessness of the two Pauli matrices is preserved, but not Hermiticity in dimensions higher than two. Since Pauli matrices describe Quaternions, Sylvester dubbed the higher-dimensional analogs "nonions", "sedenions", etc.
These two matrices are also the cornerstone of quantum mechanical dynamics in finite-dimensional vector spaces[3][4][5] as formulated by Hermann Weyl, and find routine applications in numerous areas of mathematical physics.[6] The clock matrix amounts to the exponential of position in a "clock" of d hours, and the shift matrix is just the translation operator in that cyclic vector space, so the exponential of the momentum. They are (finite-dimensional) representations of the corresponding elements of the Heisenberg group on a d-dimensional Hilbert space.
The following relations echo those of the Pauli matrices:
and the braiding relation,

the Weyl formulation of the CCR, or

On the other hand, to generalize the Walsh–Hadamard matrix W, note

Define, again with Sylvester, the following analog matrix,[7] still denoted by W in a slight abuse of notation,

It is evident that W is no longer Hermitian, but is still unitary. Direct calculation yields

which is the desired analog result. Thus, W , a Vandermonde matrix, arrays the eigenvectors of Σ1, which has the same eigenvalues as Σ3.
When d = 2k, W * is precisely the matrix of the discrete Fourier transform, converting position coordinates to momentum coordinates and vice versa.
The family of d2 unitary (but non-Hermitian) independent matrices

provides Sylvester's well-known basis for (d,ℂ), known as "nonions" (3,ℂ), "sedenions" (4,ℂ), etc...[8]
This basis can be systematically connected to the above Hermitian basis.[9] (For instance, the powers of Σ3, the Cartan subalgebra,
map to linear combinations of the hkds.) It can further be used to identify (d,ℂ) , as d → ∞, with the algebra of Poisson brackets.
See also
- Hermitian matrix
- Bloch sphere
- Discrete Fourier transform
- Generalized Clifford algebra
- Weyl–Brauer matrices
- Circulant matrix
- Shift operator
Notes
- ↑ Kimura, G. (2003). "The Bloch vector for N-level systems". Physics Letters A 314 (5–6): 339. arXiv:quant-ph/0301152. Bibcode:2003PhLA..314..339K. doi:10.1016/S0375-9601(03)00941-1., Bertlmann, Reinhold A.; Philipp Krammer (2008-06-13). "Bloch vectors for qudits". Journal of Physics A: Mathematical and Theoretical 41 (23): 235303. arXiv:0806.1174. Bibcode:2008JPhA...41w5303B. doi:10.1088/1751-8113/41/23/235303. ISSN 1751-8121. Retrieved 2014-04-10.
- ↑ Sylvester, J. J., (1882), Johns Hopkins University Circulars I: 241-242; ibid II (1883) 46; ibid III (1884) 7–9. Summarized in The Collected Mathematics Papers of James Joseph Sylvester (Cambridge University Press, 1909) v III . online and further.
- ↑ Weyl, H., "Quantenmechanik und Gruppentheorie", Zeitschrift für Physik, 46 (1927) pp. 1–46, doi:10.1007/BF02055756.
- ↑ Weyl, H., The Theory of Groups and Quantum Mechanics (Dover, New York, 1931)
- ↑ Santhanam, T. S.; Tekumalla, A. R. (1976). "Quantum mechanics in finite dimensions". Foundations of Physics 6 (5): 583. Bibcode:1976FoPh....6..583S. doi:10.1007/BF00715110.
- ↑ For a serviceable review, see Vourdas A. (2004), "Quantum systems with finite Hilbert space", Rep. Prog. Phys. 67 267. doi: 10.1088/0034-4885/67/3/R03.
- ↑ J.J. Sylvester, J. J. (1867) . Thoughts on inverse orthogonal matrices, simultaneous sign successions, and tessellated pavements in two or more colours, with applications to Newton's rule, ornamental tile-work, and the theory of numbers. Philosophical Magazine, 34:461–475. online
- ↑ Patera, J.; Zassenhaus, H. (1988). "The Pauli matrices in n dimensions and finest gradings of simple Lie algebras of type An−1". Journal of Mathematical Physics 29 (3): 665. Bibcode:1988JMP....29..665P. doi:10.1063/1.528006.
- ↑ Fairlie, D. B.; Fletcher, P.; Zachos, C. K. (1990). "Infinite-dimensional algebras and a trigonometric basis for the classical Lie algebras". Journal of Mathematical Physics 31 (5): 1088. Bibcode:1990JMP....31.1088F. doi:10.1063/1.528788.