Homography
In projective geometry, a homography is an isomorphism of projective spaces, induced by an isomorphism of the vector spaces from which the projective spaces derive.[1] It is a bijection that maps lines to lines, and thus a collineation. In general, some collineations are not homographies, but the fundamental theorem of projective geometry asserts that is not so in the case of real projective spaces of dimension at least two. Synonyms include projectivity, projective transformation, and projective collineation.
Historically, homographies (and projective spaces) have been introduced to study perspective and projections in Euclidean geometry, and the term homography, which, etymologically, roughly means "similar drawing" date from this time. At the end of 19th century, formal definitions of projective spaces were introduced, which differed from extending Euclidean or affine spaces by adding points at infinity. The term "projective transformation" originated in these abstract constructions. These constructions divide into two classes that have been shown to be equivalent. A projective space may be constructed as the set of the lines of a vector space over a given field (the above definition is based on this version); this construction facilitates the definition of projective coordinates and allows using the tools of linear algebra for the study of homographies. The alternative approach consists in defining the projective space through a set of axioms, which do not involve explicitly any field (incidence geometry, see also synthetic geometry); in this context, collineations are easier to define than homographies, and homographies are defined as specific collineations, thus called "projective collineations".
For sake of simplicity, unless otherwise stated, the projective spaces considered in this article are supposed to be defined over a (commutative) field. Equivalently Pappus's hexagon theorem and Desargues' theorem are supposed to be true. A large part of the results remain true, or may be generalized to projective geometries for which these theorems do not hold.
Geometric motivation
Historically, the concept of homography had been introduced to understand, explain and study visual perspective, and, specifically, the difference in appearance of two plane objects viewed from different points of view.
In the Euclidean space of dimension 3, a central projection from a point O (the center) onto a plane P that does not contain O is the mapping that sends a point A to the intersection (if it exists) of the line OA and the plane P. The projection is not defined if the point A belongs to the plane passing through O and parallel to P. The notion of projective space was originally introduced by extending the Euclidean space, that is, by adding points at infinity to it, in order to define the projection for every point except O.
Given another plane Q, which does not contain O, the restriction to Q of the above projection is called a perspectivity.
With these definitions, a perspectivity is only a partial function, but it becomes a bijection if extended to projective spaces. Therefore, this notion is normally defined for projective spaces. The notion is also easily generalized to projective spaces of any dimension, over any field, in the following way: Given two projective spaces P and Q of dimension n, a perspectivity is a bijection from P to Q, which may be obtained by embedding P and Q in a projective space R of dimension n+1 and restricting to P a central projection onto Q.
If f is a perspectivity from P to Q, and g a perspectivity from Q to P, with a different center, then g ∘ f is a homography from P to itself, which is called a central collineation, when the dimension of P is at least two. (see § Central collineation below and Perspectivity § Perspective collineations).
Originally, a homography was defined as the composition of a finite number of perspectivities.[2] It is a part of the fundamental theorem of projective geometry (see below) that this definition coincides with the more algebraic definition sketched in the introduction and detailed below.
Definition and expression in homogeneous coordinates
A projective space P(V) of dimension n over a field K may be defined as the set of the lines in a K-vector space of dimension n + 1. If a basis of V has been fixed, a point of V may be represented by a point  of Kn+1. A point of P(V), being a line in V, may thus be represented by the coordinates of any nonzero point of this line, which are thus called homogeneous coordinates of the projective point.
of Kn+1. A point of P(V), being a line in V, may thus be represented by the coordinates of any nonzero point of this line, which are thus called homogeneous coordinates of the projective point.
Given two projective spaces P(V) and P(W) of the same dimension, an homography is a mapping from P(V) to P(W), which is induced by an isomorphism of vector spaces  . Such an isomorphism induces a bijection from P(V) to P(W), because of the linearity of f. Two such isomorphisms, f and g, define the same homography if and only if there is a nonzero element a of K such that g = af.
. Such an isomorphism induces a bijection from P(V) to P(W), because of the linearity of f. Two such isomorphisms, f and g, define the same homography if and only if there is a nonzero element a of K such that g = af.
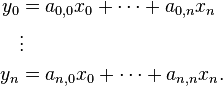
This may be written in terms of homogeneous coordinates in the following way: A homography φ may be defined by a nonsingular n+1 × n+1 matrix [ai,j], called the matrix of the homography. This matrix is defined up to the multiplication by a nonzero element of K. The homogeneous coordinates ![[x_0:\cdots:x_n]](../I/m/0e4ffe142a00ad3e554ded8037ec4389.png) of a point and the coordinates
of a point and the coordinates ![[y_0:\cdots:y_n]](../I/m/dfffe57d8835dc4463353df734f9d688.png) of its image by φ are related by
of its image by φ are related by
When the projective spaces are defined by adding points at infinity to affine spaces (projective completion) the preceding formulas become, in affine coordinates,
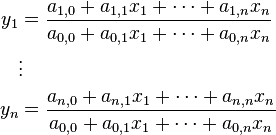
which generalizes the expression of the homographic function of the next section. This defines only a partial function between affine spaces, which is defined only outside the hyperplane where the denominator is zero.
Homographies of a projective line
The projective line over a field K may be identified with the union of K and a point, called the "point at infinity" and denoted by ∞ (see projective line). With this representation of the projective line, the homographies are the mappings

which are called homographic functions or linear fractional transformations.
In the case of the complex projective line, also called the Riemann sphere, the homographies are called Möbius transformations. These correspond precisely with those bijections of the Riemann sphere that preserve orientation and are conformal.[3]
In the study of collineations, the case of projective lines is special due to the small dimension. When the line is viewed as a projective space in isolation, any permutation of the points of a projective line is a collineation,[4] since every set of points are collinear. However, if the projective line is embedded in a higher-dimensional projective space, the geometric structure of that space can be used to impose a geometric structure on the line. Thus, in synthetic geometry, the homographies and the collineations of the projective line that are considered are those obtained by restrictions to the line of collineations and homographies of spaces of higher dimension. This means that the fundamental theorem of projective geometry (see below) remains valid in the one-dimensional setting. A homography of a projective line may also be properly defined by insisting that the mapping preserves cross-ratios.[5]
Projective frame and coordinates
A projective frame or projective basis of a projective space of dimension n is an ordered set of n + 2 points such no hyperplane contains n + 1 of them. A projective frame is sometimes called a simplex,[6] although a simplex in a space of dimension n has at most n + 1 vertices.
In this section, we consider projective spaces over a commutative field K, although most results may be generalized to projective spaces over a division algebra. Thus, we consider a projective space P(V) of dimension n, where V is a K-vector space of dimension n + 1. Let  be the canonical projection that maps a nonzero vector to the vector line that contains it.
be the canonical projection that maps a nonzero vector to the vector line that contains it.
Given a frame  of P(V), the definition implies the existence of nonzero elements of K such that
of P(V), the definition implies the existence of nonzero elements of K such that  Replacing
Replacing  by
by  for
for  and
and  by
by  , we get the following characterization of a frame: n + 2 points of P(V) form a frame if and only if they are the image by p of a basis of V and the sum of its elements. Moreover, two bases define the same frame in this way, if and only if the elements of the second one are the products of the elements of the first one by a fixed nonzero element of K.
, we get the following characterization of a frame: n + 2 points of P(V) form a frame if and only if they are the image by p of a basis of V and the sum of its elements. Moreover, two bases define the same frame in this way, if and only if the elements of the second one are the products of the elements of the first one by a fixed nonzero element of K.
It follows that, given two frames, there is exactly one homography mapping the first one onto the second one. In particular, the only homography fixing the points of a frame is the identity map. This result is much more difficult in synthetic geometry (where projective spaces are defined through axioms). It is sometimes called the first fundamental theorem of projective geometry.[7]
Every frame  allows to define projective coordinates, also known as homogeneous coordinates: every point may be written as p(v); the projective coordinates of p(v) on this frame are the coordinates of v on the base
allows to define projective coordinates, also known as homogeneous coordinates: every point may be written as p(v); the projective coordinates of p(v) on this frame are the coordinates of v on the base  It is not difficult to verify that changing the and v, without changing the frame nor p(v), results in multiplying the projective coordinates by the same nonzero element of K.
It is not difficult to verify that changing the and v, without changing the frame nor p(v), results in multiplying the projective coordinates by the same nonzero element of K.
One may also consider the projective space P(Kn+1). It has a canonical frame consisting of the image by p of the canonical basis of Kn+1 (consisting of the elements having only one nonzero entry, which is equal to 1), and (1, 1, ..., 1). On this basis, the homogeneous coordinates of p(v) are simply the entries (coefficients) of v. Given another projective space P(V) of the same dimension, and a frame F of it, there is one homography h mapping F onto the canonical frame of P(Kn+1). The projective coordinates of a point a on the frame F are the homogeneous coordinates of h(a) on the canonical frame of P(Kn+1).
Central collineations
In above sections, homographies have been defined through linear algebra. In synthetic geometry, they are traditionally defined as the composition of one or several special homographies called central collineations. It is a part of the fundamental theorem of projective geometry that the two definitions are equivalent.
In a projective space, P, of dimension n ≥ 2, a collineation of P is a bijection from P onto P that maps lines onto lines. A central collineation (traditionally these were called perspectivities,[8] but this term may be confusing, having another meaning; see Perspectivity) is a bijection α from P to P, such that there exists a hyperplane H (called the axis of α), which is fixed pointwise by α (that is, α(X) = X for all points X in H) and a point O (called the center of α), which is fixed linewise by α (any line through O is mapped to itself by α, but not necessarily pointwise).[9] There are two types of central collineations. Elations are the central collineations in which the center is incident with the axis and homologies are those in which the center is not incident with the axis. Not that a central collineation is uniquely defined by its center, its axis, a point and its image.
A central collineation is a homography defined by a (n+1) × (n+1) matrix that has an eigenspace of dimension n. It is a homology, if the matrix has another eigenvalue and is therefore diagonalizable. It is an elation, if all the eigenvalues are equal and the matrix is not diagonalizable.
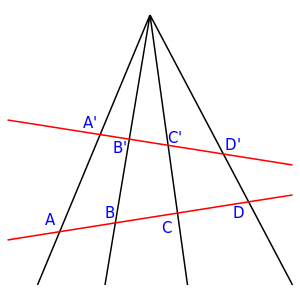
The geometric view of a central collineation is easiest to see in a projective plane. Given a central collineation α, consider a line  that does not pass through the center O, and its image under α,
that does not pass through the center O, and its image under α,  . Setting
. Setting  , the axis of α is some line M through R. The image of any point A of under α is the intersection of OA with
, the axis of α is some line M through R. The image of any point A of under α is the intersection of OA with  . The image B' of a point B that does not belong to may be constructed in the following way: let
. The image B' of a point B that does not belong to may be constructed in the following way: let  then
then 
The composition of two central collineations, while still a homography in general, is not a central collineation. In fact, every homography is the composition of a finite number of central collineations. In synthetic geometry, this property, which is a part of the fundamental theory of projective geometry is taken as the definition of homographies.[10]
Fundamental theorem of projective geometry
There are collineations besides the homographies. In particular, any field automorphism σ of a field F induces a collineation of every projective space over F by applying σ to all homogeneous coordinates (over a projective frame) of a point. These collineations are called automorphic collineations.
The fundamental theorem of projective geometry consists of the three following theorems.
- Given two projective frames of a projective space P, there is exactly one homography of P that maps the first frame onto the second one.
- If the dimension of a projective space P is at least two, every collineation of P is the composition of an automorphic collineation and a homography. In particular, over the reals, every collineation of a projective space of dimension at least two is a homography.[11]
- Every homography is the composition of a finite number of perspectivities. In particular, if the dimension of the implied projective space is at least two, every homography is the composition of a finite number of central collineations.
If projective spaces are defined by means of axioms (synthetic geometry), the third part is simply a definition. On the other hand, if projective spaces are defined by means of linear algebra, the first part is an easy corollary of the definitions. Therefore, the proof of the first part in synthetic geometry, and the proof of the third part in terms of linear algebra both are fundamental steps of the proof of the equivalence of the two ways of defining projective spaces.
Homography groups
As every homography has an inverse mapping and the composition of two homographies is another, the homographies of a given projective space form a group. For example, the Möbius group is the homography group of any complex projective line.
As all the projective spaces of the same dimension over the same field are isomorphic, the same is true for their homography groups. They are therefore considered as a single group acting on several spaces, and only the dimension and the field appear in the notation, not the specific projective space.
Homography groups also called projective linear groups are denoted PGL(n + 1, F) when acting on a projective space of dimension n over a field F. Above definition of homographies shows that PGL(n + 1, F) may be identified to the quotient group GL(n + 1, F) / F∗I, where GL(n + 1, F) is the general linear group of the invertible matrices, and F∗I is the group of the products by a nonzero element of F of the identity matrix of size (n + 1) × (n + 1).
When F is a Galois field GF(q) then the homography group is written PGL(n,q). For example, PGL(2,7) acts on the eight points in the projective line over the finite field GF(7), while PGL(2,4), which is isomorphic to the alternating group A5, is the homography group of the projective line with five points.[12]
The homography group PGL(n + 1, F) is a subgroup of the collineation group PΓL(n + 1,F) of the collineations of a projective space of dimension n. When the points and lines of the projective space are viewed as a block design, whose blocks are the sets of points contained in a line, it is common to call the collineation group the automorphism group of the design.
Cross-ratio
The cross-ratio of four collinear points is an invariant under the homography that is fundamental for the study of the homographies of the lines.
Three distinct points a, b and c on a projective line over a field F form a projective frame of this line. There is therefore a unique homography h of this line onto F ∪ ∞ that maps a to ∞, b to 0, and c to 1. Given a fourth point on the same line, the cross-ratio of the four points a, b, c and d, denoted [a, b; c, d], is the element h(d) of F ∪ ∞. In other words, if d has homogeneous coordinates [k : 1] over the projective frame (a, b, c), then [a, b; c, d] = k.[13]
Over a ring
Suppose A is a ring and U is its group of units. Homographies act on a projective line over A, written P(A), consisting of points U(a, b) with homogeneous coordinates. The homographies on P(A) are described by matrix mappings

When A is a commutative ring, the homography may be written
but otherwise the linear fractional transformation is seen as an equivalence:

Ring homographies have been used in quaternion analysis, and with dual quaternions to facilitate screw theory. When A is taken to be biquaternions the homographies exhibit conformal symmetry of an electromagnetic field. The homography group of the ring of integers Z is modular group PSL(2, Z).
Periodic homographies
The homography  is periodic when the ring is Z/nZ (the integers modulo n) since then
is periodic when the ring is Z/nZ (the integers modulo n) since then
 Arthur Cayley was interested in periodicity when he calculated iterates in 1879.[14]
In his review of a brute force approach to periodicity of homographies, H.S.M. Coxeter gave this analysis:
Arthur Cayley was interested in periodicity when he calculated iterates in 1879.[14]
In his review of a brute force approach to periodicity of homographies, H.S.M. Coxeter gave this analysis:
- A real homography is involutory (of period 2) if and only if a + d = 0. If it is periodic with period n > 2, then it is elliptic, and no loss of generality occurs by assuming that ad − bc = 1. Since the characteristic roots are exp(± hπi/m), where (h, m) = 1, the trace is a + d = 2 cos(hπ/m).[15]
See also
| Wikimedia Commons has media related to Homography. |
Notes
- ↑ Berger, chapter 4
- ↑ Meserve 1983, pp. 43–4
- ↑ Hartshorne 1967, p. 138
- ↑ Yale 1968, p. 244, Baer 2005, p. 50, Artin 1957, p. 88
- ↑ In older treatments one often sees the requirement of preserving harmonic tetrads (harmonic sets) (four collinear points whose cross-ratio is -1) but this excludes projective lines defined over fields of characteristic two and so is unnecessarily restrictive. See Baer 2005, p. 76
- ↑ Baer, p. 66
- ↑ Berger, chapter 6
- ↑ Yale 1968, p. 224
- ↑ Beutelspacher & Rosenbaum 1998, p. 96
- ↑ Meserve 1983, pp. 43-4
- ↑ Hirschfeld 1979, p. 30
- ↑ Hirschfeld 1979, p. 129
- ↑ Berger, chapter 6
- ↑ Arthur Cayley (1879) "On the matrix
 and its connection with the function
and its connection with the function  ", Messenger of Mathematics 9:104
", Messenger of Mathematics 9:104 - ↑ H.S.M. Coxeter, On periodicity in Mathematical Reviews
References
- Artin, E. (1957), Geometric Algebra, Interscience Publishers
- Baer, Reinhold (2005) [First published 1952], Linear Algebra and Projective Geometry, Dover, ISBN 9780486445656
- Berger, Marcel (2009), Geometry I, Springer-Verlag, ISBN 978-3-540-11658-5, translated from the 1977 French original by M. Cole and S. Levy, fourth printing of the 1987 English translation
- Beutelspacher, Albrecht; Rosenbaum, Ute (1998), Projective Geometry: From Foundations to Applications, Cambridge University Press, ISBN 0-521-48364-6
- Hartshorne, Robin (1967), Foundations of Projective Geometry, New York: W.A. Benjamin, Inc
- Hirschfeld, J. W. P. (1979), Projective Geometries Over Finite Fields, Oxford University Press, ISBN 978-0-19-850295-1
- Meserve, Bruce E. (1983), Fundamental Concepts of Geometry, Dover, ISBN 0-486-63415-9
- Yale, Paul B. (1968), Geometry and Symmetry, Holden-Day
Further reading
- Patrick du Val (1964) Homographies, quaternions and rotations, Oxford Mathematical Monographs, Clarendon Press, Oxford, MR 0169108 .
- Gunter Ewald (1971) Geometry: An Introduction, page 263, Belmont:Wadsworth Publishing ISBN 0-534-00034-7.