68–95–99.7 rule
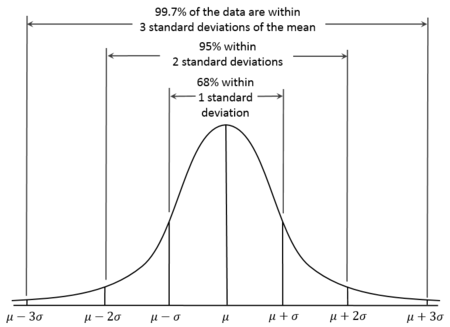
In statistics, the so-called 68–95–99.7 rule is a shorthand used to remember the percentage of values that lie within a band around the mean in a normal distribution with a width of one, two and three standard deviations, respectively; more accurately, 68.27%, 95.45% and 99.73% of the values lie within one, two and three standard deviations of the mean, respectively. In mathematical notation, these facts can be expressed as follows, where x is an observation from a normally distributed random variable, μ is the mean of the distribution, and σ is its standard deviation:
In the empirical sciences the so-called three-sigma rule of thumb expresses a conventional heuristic that "nearly all" values are taken to lie within three standard deviations of the mean, i.e. that it is empirically useful to treat 99.7% probability as "near certainty".[1] The usefulness of this heuristic of course depends significantly on the question under consideration, and there are other conventions, e.g. in the social sciences a result may be considered "significant" if its confidence level is of the order of a two-sigma effect (95%), while in particle physics, there is a convention of a five-sigma effect (99.99994% confidence) being required to qualify as a "discovery".
The "three sigma rule of thumb" is related to a result also known as the three-sigma rule, which states that even for non-normally distributed variables, at least 98% of cases should fall within properly-calculated three-sigma intervals. [2]
Cumulative distribution function

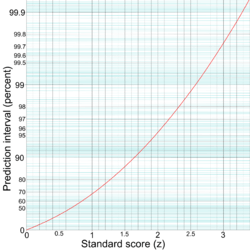
These numerical values "68%, 95%, 99.7%" come from the cumulative distribution function of the normal distribution.
The prediction interval for any standard score corresponds numerically to (1−(1−Φµ,σ2(standard score))·2).
For example, Φ(2) ≈ 0.9772, or Pr(x ≤ μ + 2σ) ≈ 0.9772, corresponding to a prediction interval of (1 − (1 − 0.97725)·2) = 0.9545 = 95.45%. Note that this is not a symmetrical interval – this is merely the probability that an observation is less than μ + 2σ. To compute the probability that an observation is within two standard deviations of the mean (small differences due to rounding):

This is related to confidence interval as used in statistics: x̅ ± 2σ is approximately a 95% confidence interval when x̅ is the average of a sample.
Normality tests
The "68–95–99.7 rule" is often used to quickly get a rough probability estimate of something, given its standard deviation, if the population is assumed to be normal. It is also as a simple test for outliers if the population is assumed normal, and as a normality test if the population is potentially not normal.
To pass from a sample to a number of standard deviations, one first computes the deviation, either the error or residual depending on whether one knows the population mean or only estimates it. The next step is standardizing (dividing by the population standard deviation), if the population parameters are known, or studentizing (dividing by an estimate of the standard deviation), if the parameters are unknown and only estimated.
To use as a test for outliers or a normality test, one computes the size of deviations in terms of standard deviations, and compares this to expected frequency. Given a sample set, one can compute the studentized residuals and compare these to the expected frequency: points that fall more than 3 standard deviations from the norm are likely outliers (unless the sample size is significantly large, by which point one expects a sample this extreme), and if there are many points more than 3 standard deviations from the norm, one likely has reason to question the assumed normality of the distribution. This holds ever more strongly for moves of 4 or more standard deviations.
One can compute more precisely, approximating the number of extreme moves of a given magnitude or greater by a Poisson distribution, but simply, if one has multiple 4 standard deviation moves in a sample of size 1,000, one has strong reason to consider these outliers or question the assumed normality of the distribution.
For example, a 6σ event corresponds to a chance of about two parts per billion. For illustration, if events are taken to occur daily, this would correspond to an event expected every 1.4 million years. This gives a simple normality test: if one witnesses a 6σ in daily data and significantly fewer than 1 million years have passed, then a normal distribution most likely does not provide a good model for the magnitude or frequency of large deviations in this respect.
In The Black Swan, Nassim Nicholas Taleb gives the example of risk models according to which the Black Monday crash would correspond to a 36-σ event: the occurrence of such an event should instantly suggest that the model is flawed, i.e. that the process under consideration is not satisfactorily modelled by a normal distribution. Refined models should then be considered, e.g. by the introduction of stochastic volatility. In such discussions it is important to be aware of problem of the gambler's fallacy, which states that a single observation of a rare event does not contradict that the event is in fact rare. It is the observation of a multitude of purportedly rare events that undermines the hypothesis that they are actually rare. It is the observation a plurality of purportedly rare events that increasingly undermines the hypothesis that they are rare, i.e. the validity of the assumed model. A proper modelling of this process of gradual loss of confidence in a hypothesis would involve the designation of prior probability not just to the hypothesis itself but to all possible alternative hypotheses. For this reason, statistical hypothesis testing works not so much by confirming a hypothesis considered to be likely, but by refuting hypotheses considered unlikely.
Table of numerical values
Because of the exponential tails of the normal distribution, odds of higher deviations decrease very quickly. From the rules for normally distributed data for a daily event:
| Range | Expected Fraction of
Population Inside Range |
Approximate Expected
Frequency Outside Range |
Approximate Frequency for Daily Event |
|---|---|---|---|
| μ ± 0.5σ | 0.382924922548026 | 2 in 3 | Four times a week |
| μ ± σ | 0.682689492137086 | 1 in 3 | Twice a week |
| μ ± 1.5σ | 0.866385597462284 | 1 in 7 | Weekly |
| μ ± 2σ | 0.954499736103642 | 1 in 22 | Every three weeks |
| μ ± 2.5σ | 0.987580669348448 | 1 in 81 | Quarterly |
| μ ± 3σ | 0.997300203936740 | 1 in 370 | Yearly |
| μ ± 3.5σ | 0.999534741841929 | 1 in 2149 | Every six years |
| μ ± 4σ | 0.999936657516334 | 1 in 15787 | Every 43 years (twice in a lifetime) |
| μ ± 4.5σ | 0.999993204653751 | 1 in 147160 | Every 403 years (once in the modern era) |
| μ ± 5σ | 0.999999426696856 | 1 in 1744278 | Every 4776 years (once in recorded history) |
| μ ± 5.5σ | 0.999999962020875 | 1 in 26330254 | Every 72090 years (thrice in history of modern humankind) |
| μ ± 6σ | 0.999999998026825 | 1 in 506797346 | Every 1.38 million years (twice in history of humankind) |
| μ ± 6.5σ | 0.999999999919680 | 1 in 12450197393 | Every 34 million years (twice since the extinction of dinosaurs) |
| μ ± 7σ | 0.999999999997440 | 1 in 390682215445 | Every 1.07 billion years (a quarter of Earth's history) |
| μ ± xσ |  | 1 in  | Every days |
See also
References
- ↑ this usage of "three-sigma rule" entered common usage in the 2000s, e.g. cited in Schaum's Outline of Business Statistics, McGraw Hill Professional, 2003, p. 359, and in Erik W. Grafarend, Linear and Nonlinear Models: Fixed Effects, Random Effects, and Mixed Models, Walter de Gruyter, 2006, p. 553.
- ↑ See:
- D. J. Wheeler and D. S. Chambers, Understanding Statistical Process Control, SPC Press, 1992.
- Veronica Czitrom, Patrick D. Spagon ,Statistical Case Studies for Industrial Process Improvement, SIAM, 1997, p. 342.
- F. Pukelsheim, "The three sigma rule", American Statistician 48 (1994), 88-91.
External links
- "The Normal Distribution" by Balasubramanian Narasimhan
- "Calculate percentage proportion within x sigmas at WolframAlpha