Eigenvalues and eigenvectors

In linear algebra, an eigenvector or characteristic vector of a square matrix is a vector that does not change its direction under the associated linear transformation. In other words—if v is a vector that is not zero, then it is an eigenvector of a square matrix A if Av is a scalar multiple of v. This condition could be written as the equation:

(1)
where λ is a scalar known as the eigenvalue or characteristic value associated with the eigenvector v. Geometrically, an eigenvector corresponding to a real, nonzero eigenvalue points in a direction that is stretched by the transformation and the eigenvalue is the factor by which it is stretched. If the eigenvalue is negative, the direction is reversed.[1]
There is a correspondence between n by n square matrices and linear transformations from an n-dimensional vector space to itself. For this reason, it is equivalent to define eigenvalues and eigenvectors using either the language of matrices or the language of linear transformations.[2][3]
Overview
If a two-dimensional space is visualized as a rubber sheet, a linear map with two eigenvectors and associated eigenvalues λ1 and λ2 may be envisioned as stretching/compressing the sheet simultaneously along the two directions of the eigenvectors with the factors given by the eigenvalues. Thereby only the directions of the eigenvectors do not change. For example, the sheet could be stretched by a factor λ1 along the x-axis and λ2 along the y-axis, assuming the eigendirections being given by the directions of the coordinate axes. In two dimensions, there can be two such independent stretching directions, but they do not have to be at right angles to each other. A rotation in two dimensions is a linear map with no eigenvectors, and a shear, as in the photo, has only one eigenvector, with eigenvalue 1. Other vectors besides eigenvectors change their directions, unless the two eigenvalues are equal, in which case all vectors are eigenvectors with that eigenvalue, yielding a magnification—i.e., a linear map that alters neither shape nor direction, but only magnitude. A reflection may be viewed as stretching a line perpendicular to the axis of reflection by a factor of −1 while stretching the axis of reflection by a factor of 1. For 3D rotations, the axis of rotation is an eigenvector of eigenvalue 1.
A three-coordinate vector may be seen as an arrow in three-dimensional space starting at the origin. In that case, an eigenvector  is an arrow whose direction is either preserved or exactly reversed after multiplication by
is an arrow whose direction is either preserved or exactly reversed after multiplication by  . The corresponding eigenvalue determines how the length of the arrow is changed by the operation, and whether its direction is reversed or not, determined by whether the eigenvalue is negative or positive.
. The corresponding eigenvalue determines how the length of the arrow is changed by the operation, and whether its direction is reversed or not, determined by whether the eigenvalue is negative or positive.
In abstract linear algebra, these concepts are naturally extended to more general situations, where the set of real scalar factors is replaced by any field of scalars (such as algebraic or complex numbers); the set of Cartesian vectors  is replaced by any vector space (such as the continuous functions, the polynomials or the trigonometric series), and multiplication of a vector by a matrix is replaced by any linear operator that maps vectors to vectors (such as the derivative from calculus). In such cases, the "vector" in "eigenvector" may be replaced by a more specific term, such as "eigenfunction", "eigenmode", "eigenface", or "eigenstate". Thus, for example, the exponential function
is replaced by any vector space (such as the continuous functions, the polynomials or the trigonometric series), and multiplication of a vector by a matrix is replaced by any linear operator that maps vectors to vectors (such as the derivative from calculus). In such cases, the "vector" in "eigenvector" may be replaced by a more specific term, such as "eigenfunction", "eigenmode", "eigenface", or "eigenstate". Thus, for example, the exponential function  is an eigenfunction of the derivative operator,
is an eigenfunction of the derivative operator,  , with eigenvalue
, with eigenvalue  , since its derivative is
, since its derivative is  .
.
The set of all eigenvectors of a matrix (or linear operator), each paired with its corresponding eigenvalue, is called the eigensystem of that matrix.[4] Any nonzero scalar multiple of an eigenvector is also an eigenvector corresponding to the same eigenvalue. An eigenspace or characteristic space of a matrix is the set of all eigenvectors of corresponding to the same eigenvalue, together with the zero vector.[5][6][7] An eigenbasis for is any basis for the set of all vectors that consists of linearly independent eigenvectors of . Not every matrix has an eigenbasis, but every symmetric matrix does.
The prefix eigen- is adopted from the German word eigen for "own-", "unique to", "peculiar to", or "belonging to" in the sense of "idiosyncratic" in relation to the originating matrix.
Eigenvalues and eigenvectors have many applications in both pure and applied mathematics. They are used in matrix factorization, in quantum mechanics, and in many other areas.
History
Eigenvalues are often introduced in the context of linear algebra or matrix theory. Historically, however, they arose in the study of quadratic forms and differential equations.
In the 18th century Euler studied the rotational motion of a rigid body and discovered the importance of the principal axes.[8] Lagrange realized that the principal axes are the eigenvectors of the inertia matrix.[9] In the early 19th century, Cauchy saw how their work could be used to classify the quadric surfaces, and generalized it to arbitrary dimensions.[10] Cauchy also coined the term racine caractéristique (characteristic root) for what is now called eigenvalue; his term survives in characteristic equation.[11]
Fourier used the work of Laplace and Lagrange to solve the heat equation by separation of variables in his famous 1822 book Théorie analytique de la chaleur.[12] Sturm developed Fourier's ideas further and brought them to the attention of Cauchy, who combined them with his own ideas and arrived at the fact that real symmetric matrices have real eigenvalues.[10] This was extended by Hermite in 1855 to what are now called Hermitian matrices.[11] Around the same time, Brioschi proved that the eigenvalues of orthogonal matrices lie on the unit circle,[10] and Clebsch found the corresponding result for skew-symmetric matrices.[11] Finally, Weierstrass clarified an important aspect in the stability theory started by Laplace by realizing that defective matrices can cause instability.[10]
In the meantime, Liouville studied eigenvalue problems similar to those of Sturm; the discipline that grew out of their work is now called Sturm–Liouville theory.[13] Schwarz studied the first eigenvalue of Laplace's equation on general domains towards the end of the 19th century, while Poincaré studied Poisson's equation a few years later.[14]
At the start of the 20th century, Hilbert studied the eigenvalues of integral operators by viewing the operators as infinite matrices.[15] He was the first to use the German word eigen, which means "own", to denote eigenvalues and eigenvectors in 1904,[16] though he may have been following a related usage by Helmholtz. For some time, the standard term in English was "proper value", but the more distinctive term "eigenvalue" is standard today.[17]
The first numerical algorithm for computing eigenvalues and eigenvectors appeared in 1929, when Von Mises published the power method. One of the most popular methods today, the QR algorithm, was proposed independently by John G.F. Francis[18] and Vera Kublanovskaya[19] in 1961.[20]
Real matrices
 acts by stretching the vector
acts by stretching the vector  , not changing its direction, so is an eigenvector of .
, not changing its direction, so is an eigenvector of .Consider n-dimensional vectors that are formed as a list of n real numbers, such as the three dimensional vectors,
These vectors are said to be scalar multiples of each other, also parallel or collinear, if there is a scalar λ, such that

In this case λ = −1/20.
Now consider the linear transformation of n-dimensional vectors defined by an n×n matrix A, that is,

or
where, for each index  ,
,
 .
.
If it occurs that w and v are scalar multiples, that is if
then v is an eigenvector of the linear transformation A and the scale factor λ is the eigenvalue corresponding to that eigenvector.

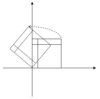
Two dimensional example
Consider the transformation matrix A, given by,
The figure on the right shows the effect of this transformation on point coordinates in the plane. The eigenvectors v of this transformation satisfy the equation,

Rearrange this equation to obtain

which has a solution only when its determinant | A − λI | equals zero.
Set the determinant to zero to obtain the polynomial equation,

known as the characteristic polynomial of the matrix A. In this case, it has the roots λ = 1 and λ = 3.
For λ = 1, the equation becomes,

which has the solution,

For λ = 3, the equation becomes,

which has the solution,

Thus, the vectors v and w are eigenvectors of A associated with the eigenvalues λ = 1 and λ = 3, respectively.
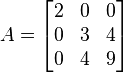
Three dimensional example
The eigenvectors v of the 3×3 matrix A,
satisfy the equation

This equation has solutions only if the determinant | A − λI | equals zero, which yields the characteristic polynomial,

with the roots λ = 1, λ = 2, and λ = 3.
Associated with the roots λ = 1, λ = 2, and λ = 3 are the respective eigenvectors,

Diagonal matrices
Matrices with entries only along the main diagonal are called diagonal matrices. It is easy to see that the eigenvalues of a diagonal matrix are the diagonal elements themselves. Consider the matrix A,
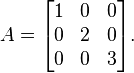
The characteristic polynomial of A is given by

which has the roots λ = 1, λ = 2, and λ = 3.
Associated with these roots are the eigenvectors,

respectively.
Triangular matrices
A matrix with elements above the main diagonal that are all zeros is described as a triangular matrix, or in this case, lower triangular. If the elements below the main diagonal are all zeros then the matrix is upper triangular. The eigenvalues of triangular matrices are the elements of the main diagonal, in the same way as for diagonal matrices.
Consider the lower triangular matrix A,
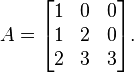
The characteristic polynomial of A is given by
which has the roots λ = 1, λ = 2, and λ = 3.
Associated with these roots are the eigenvectors,

respectively.
Eigenvector basis
In this section, it is shown that a change of coordinates of a matrix A to a basis formed by its eigenvectors results in a diagonal matrix.
Let A be an n×n linear transformation

that has n linearly independent eigenvectors vi, and consider the change of coordinates of A so that it is defined relative to its eigenvector basis.
Recall that the eigenvectors vi of A satisfy the eigenvalue equation,

Assemble these eigenvectors into the matrix V, which is invertible because these vectors are assumed linearly independent. This means the coordinates of x and X relative to the basis vi can be computed to be,

This yields the change of coordinates

To see the effect of this change of coordinates on A, introduce I=VV−1 into the eigenvalue equation

and multiply both side by V−1 to obtain

Notice that

which is the natural basis vector. Thus,

and the matrix K is found to be a diagonal matrix with the eigenvalues λi as its diagonal elements.
This shows that a matrix A with a linearly independent system of eigenvectors is similar to a diagonal matrix formed from its eigenvalues.
Matrices
Characteristic polynomial
The eigenvalue equation for a matrix is

which is equivalent to

where  is the
is the  identity matrix. It is a fundamental result of linear algebra that an equation
identity matrix. It is a fundamental result of linear algebra that an equation  has a non-zero solution if, and only if, the determinant
has a non-zero solution if, and only if, the determinant  of the matrix
of the matrix  is zero. It follows that the eigenvalues of are precisely the real numbers that satisfy the equation
is zero. It follows that the eigenvalues of are precisely the real numbers that satisfy the equation

The left-hand side of this equation can be seen (using Leibniz' rule for the determinant) to be a polynomial function of the variable . The degree of this polynomial is  , the order of the matrix. Its coefficients depend on the entries of , except that its term of degree is always
, the order of the matrix. Its coefficients depend on the entries of , except that its term of degree is always  . This polynomial is called the characteristic polynomial of ; and the above equation is called the characteristic equation (or, less often, the secular equation) of .
. This polynomial is called the characteristic polynomial of ; and the above equation is called the characteristic equation (or, less often, the secular equation) of .
For example, let be the matrix
The characteristic polynomial of is

which is
![(2 - \lambda) \bigl[ (3 - \lambda) (9 - \lambda) - 16 \bigr] = -\lambda^3 + 14\lambda^2 - 35\lambda + 22](../I/m/7484e3ce3b8b017027da3f5c6c24893d.png)
The roots of this polynomial are 2, 1, and 11. Indeed these are the only three eigenvalues of , corresponding to the eigenvectors ![[1,0,0]',](../I/m/c879f503a66bd9c7487ebdca7bdd04db.png)
![[0,2,-1]',](../I/m/83232ae0a30ec561e89ca8f5650ef767.png) and
and ![[0,1,2]'](../I/m/64e80d43dad902f057fe3311c88d3344.png) (or any non-zero multiples thereof).
(or any non-zero multiples thereof).
Real domain
Since the eigenvalues are roots of the characteristic polynomial, an matrix has at most eigenvalues. If the matrix has real entries, the coefficients of the characteristic polynomial are all real; but it may have fewer than real roots, or no real roots at all.
For example, consider the cyclic permutation matrix
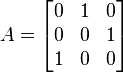
This matrix shifts the coordinates of the vector up by one position, and moves the first coordinate to the bottom. Its characteristic polynomial is  which has one real root
which has one real root  . Any vector with three equal non-zero coordinates is an eigenvector for this eigenvalue. For example,
. Any vector with three equal non-zero coordinates is an eigenvector for this eigenvalue. For example,
Complex domain
The fundamental theorem of algebra implies that the characteristic polynomial of an matrix , being a polynomial of degree , has exactly complex roots. More precisely, it can be factored into the product of linear terms,

where each  is a complex number. The numbers
is a complex number. The numbers  ,
,  , ...
, ...  , (which may not be all distinct) are roots of the polynomial, and are precisely the eigenvalues of .
, (which may not be all distinct) are roots of the polynomial, and are precisely the eigenvalues of .
Even if the entries of are all real numbers, the eigenvalues may still have non-zero imaginary parts (and the coordinates of the corresponding eigenvectors therefore also have non-zero imaginary parts). Also, the eigenvalues may be irrational numbers even if all the entries of are rational numbers, or all are integers. However, if the entries of are algebraic numbers (which include the rationals), the eigenvalues are (complex) algebraic numbers too.
The non-real roots of a real polynomial with real coefficients can be grouped into pairs of complex conjugate values, namely with the two members of each pair having the same real part and imaginary parts that differ only in sign. If the degree is odd, then by the intermediate value theorem at least one of the roots is real. Therefore, any real matrix with odd order has at least one real eigenvalue—whereas a real matrix with even order may have no real eigenvalues.
In the example of the 3×3 cyclic permutation matrix , above, the characteristic polynomial has two additional non-real roots, namely
 and
and 
where  is the imaginary unit. Note that
is the imaginary unit. Note that  ,
,  , and
, and  . Then
. Then
 and
and 
Therefore, the vectors ![[1,\lambda_2,\lambda_3]'](../I/m/71606c5a28b14629ce2f492edc4a75d1.png) and
and ![[1,\lambda_3,\lambda_2]'](../I/m/11947f557635eab3a0ad9279d1103fa2.png) are eigenvectors of with eigenvalues and
are eigenvectors of with eigenvalues and  respectively.
respectively.
Algebraic multiplicity
For a definition of "Geometric multiplicity", referred to in this section, see below.
Let be an eigenvalue of an matrix . The algebraic multiplicity  of is its multiplicity as a root of the characteristic polynomial, that is, the largest integer
of is its multiplicity as a root of the characteristic polynomial, that is, the largest integer  such that
such that  divides evenly that polynomial.[21][22][23]
divides evenly that polynomial.[21][22][23]
Like the geometric multiplicity  , we have
, we have  ; and the sum
; and the sum  of over all distinct eigenvalues also cannot exceed . If complex eigenvalues are considered, is exactly .
of over all distinct eigenvalues also cannot exceed . If complex eigenvalues are considered, is exactly .
It can be proved that the geometric multiplicity of an eigenvalue never exceeds its algebraic multiplicity . Therefore,  is at most .[23]
is at most .[23]
If  , then is said to be a simple eigenvalue.[22]
, then is said to be a simple eigenvalue.[22]
If  , then is said to be a semisimple eigenvalue.
, then is said to be a semisimple eigenvalue.
Example
For the matrix:
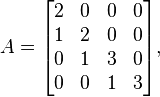
- the characteristic polynomial of is
 ,
, - being the product of the diagonal with a lower triangular matrix.
The roots of this polynomial, and hence the eigenvalues, are 2 and 3.
The algebraic multiplicity of each eigenvalue is 2; in other words they are both double roots.
On the other hand, the geometric multiplicity of the eigenvalue 2 is only 1, because its eigenspace is spanned by the vector ![[0,1,-1,1]](../I/m/850ad10918045db0f4f52d8ead4bb58a.png) , and is therefore 1-dimensional.
Similarly, the geometric multiplicity of the eigenvalue 3 is 1 because its eigenspace is spanned by
, and is therefore 1-dimensional.
Similarly, the geometric multiplicity of the eigenvalue 3 is 1 because its eigenspace is spanned by ![[0,0,0,1]](../I/m/e6c9041ba8cd1e65331dcbcc67ffe44c.png) . Hence, the total algebraic multiplicity of A, denoted
. Hence, the total algebraic multiplicity of A, denoted  , is 4, which is the most it could be for a 4 by 4 matrix. The geometric multiplicity
, is 4, which is the most it could be for a 4 by 4 matrix. The geometric multiplicity  is 2, which is the smallest it could be for a matrix with two distinct eigenvalues.
is 2, which is the smallest it could be for a matrix with two distinct eigenvalues.
Diagonalization and eigendecomposition
If the sum of the geometric multiplicities of all eigenvalues is exactly , then has a set of linearly independent eigenvectors. Let  be a square matrix whose columns are those eigenvectors, in any order. Then we have
be a square matrix whose columns are those eigenvectors, in any order. Then we have  , where
, where  is the diagonal matrix such that
is the diagonal matrix such that  is the eigenvalue associated to column of . Since the columns of are linearly independent, the matrix is invertible. Premultiplying both sides by
is the eigenvalue associated to column of . Since the columns of are linearly independent, the matrix is invertible. Premultiplying both sides by  we get
we get  . By definition, therefore, the matrix is diagonalizable.
. By definition, therefore, the matrix is diagonalizable.
Conversely, if is diagonalizable, let be a non-singular square matrix such that  is some diagonal matrix
is some diagonal matrix  . Multiplying both sides on the left by we get
. Multiplying both sides on the left by we get  . Therefore each column of must be an eigenvector of , whose eigenvalue is the corresponding element on the diagonal of . Since the columns of must be linearly independent, it follows that
. Therefore each column of must be an eigenvector of , whose eigenvalue is the corresponding element on the diagonal of . Since the columns of must be linearly independent, it follows that  . Thus is equal to if and only if is diagonalizable.
. Thus is equal to if and only if is diagonalizable.
If is diagonalizable, the space of all -coordinate vectors can be decomposed into the direct sum of the eigenspaces of . This decomposition is called the eigendecomposition of , and it is preserved under change of coordinates.
A matrix that is not diagonalizable is said to be defective. For defective matrices, the notion of eigenvector can be generalized to generalized eigenvectors, and that of diagonal matrix to a Jordan form matrix. Over an algebraically closed field, any matrix has a Jordan form and therefore admits a basis of generalized eigenvectors, and a decomposition into generalized eigenspaces.
Further properties
Let be an arbitrary matrix of complex numbers with eigenvalues , , ... . (Here it is understood that an eigenvalue with algebraic multiplicity  occurs times in this list.) Then
occurs times in this list.) Then
- The trace of , defined as the sum of its diagonal elements, is also the sum of all eigenvalues:
 .
.- The determinant of is the product of all eigenvalues:
 .
.- The eigenvalues of the th power of , i.e. the eigenvalues of
 , for any positive integer , are
, for any positive integer , are 
- The matrix is invertible if and only if all the eigenvalues are nonzero.
- If is invertible, then the eigenvalues of
 are
are  . Clearly, the geometric multiplicities coincide. Moreover, since the characteristic polynomial of the inverse is the reciprocal polynomial for that of the original, they share the same algebraic multiplicity.
. Clearly, the geometric multiplicities coincide. Moreover, since the characteristic polynomial of the inverse is the reciprocal polynomial for that of the original, they share the same algebraic multiplicity. - If is equal to its conjugate transpose
 (in other words, if is Hermitian), then every eigenvalue is real. The same is true of any symmetric real matrix. If is also positive-definite, positive-semidefinite, negative-definite, or negative-semidefinite, then every eigenvalue is positive, non-negative, negative, or non-positive respectively.
(in other words, if is Hermitian), then every eigenvalue is real. The same is true of any symmetric real matrix. If is also positive-definite, positive-semidefinite, negative-definite, or negative-semidefinite, then every eigenvalue is positive, non-negative, negative, or non-positive respectively. - Every eigenvalue of a unitary matrix has absolute value
 .
.
Left and right eigenvectors
The use of matrices with a single column (rather than a single row) to represent vectors is traditional in many disciplines. For that reason, the word "eigenvector" almost always means a right eigenvector, namely a column vector that must be placed to the right of the matrix in the defining equation
 .
.
There may be also single-row vectors that are unchanged when they occur on the left side of a product with a square matrix ; that is, which satisfy the equation

Any such row vector  is called a left eigenvector of .
is called a left eigenvector of .
The left eigenvectors of are transposes of the right eigenvectors of the transposed matrix  , since their defining equation is equivalent to
, since their defining equation is equivalent to

It follows that, if is Hermitian, its left and right eigenvectors are complex conjugates. In particular if is a real symmetric matrix, they are the same except for transposition.
Variational characterization
In the Hermitian case, eigenvalues can be given a variational characterization. The largest eigenvalue of  is the maximum value of the quadratic form
is the maximum value of the quadratic form  . A value of that realizes that maximum, is an eigenvector.
. A value of that realizes that maximum, is an eigenvector.
General definition
The concept of eigenvectors and eigenvalues extends naturally to abstract linear transformations on abstract vector spaces. Namely, let  be any vector space over some field
be any vector space over some field  of scalars, and let
of scalars, and let  be a linear transformation mapping into . We say that a non-zero vector of is an eigenvector of if (and only if) there is a scalar in such that
be a linear transformation mapping into . We say that a non-zero vector of is an eigenvector of if (and only if) there is a scalar in such that
 .
.
This equation is called the eigenvalue equation for , and the scalar is the eigenvalue of corresponding to the eigenvector . Note that  means the result of applying the operator to the vector , while
means the result of applying the operator to the vector , while  means the product of the scalar by .[30]
means the product of the scalar by .[30]
The matrix-specific definition is a special case of this abstract definition. Namely, the vector space is the set of all column vectors of a certain size ×1, and is the linear transformation that consists in multiplying a vector by the given matrix .
Some authors allow to be the zero vector in the definition of eigenvector.[31] This is reasonable as long as we define eigenvalues and eigenvectors carefully: If we would like the zero vector to be an eigenvector, then we must first define an eigenvalue of as a scalar in such that there is a nonzero vector in with . We then define an eigenvector to be a vector in such that there is an eigenvalue in with . This way, we ensure that it is not the case that every scalar is an eigenvalue corresponding to the zero vector.
Geometric multiplicity
The geometric multiplicity  of an eigenvalue is the dimension of the eigenspace associated with , i.e., the maximum number of vectors in any linearly independent set of eigenvectors with that eigenvalue.[23][22] It is clear from the definition of eigenvalue in the eigenvalue equation (1) that we always have
of an eigenvalue is the dimension of the eigenspace associated with , i.e., the maximum number of vectors in any linearly independent set of eigenvectors with that eigenvalue.[23][22] It is clear from the definition of eigenvalue in the eigenvalue equation (1) that we always have 
Eigenspace and spectrum
If is an eigenvector of , with eigenvalue , then any scalar multiple  of with nonzero
of with nonzero  is also an eigenvector with eigenvalue , since
is also an eigenvector with eigenvalue , since  . Moreover, if and are eigenvectors with the same eigenvalue and
. Moreover, if and are eigenvectors with the same eigenvalue and  , then
, then  is also an eigenvector with the same eigenvalue . Therefore, the set of all eigenvectors with the same eigenvalue , together with the zero vector, is a linear subspace of , called the eigenspace of associated to .[32][33][34] If that subspace has dimension 1, it is sometimes called an eigenline.[35]
is also an eigenvector with the same eigenvalue . Therefore, the set of all eigenvectors with the same eigenvalue , together with the zero vector, is a linear subspace of , called the eigenspace of associated to .[32][33][34] If that subspace has dimension 1, it is sometimes called an eigenline.[35]
The eigenspaces of T always form a direct sum (and as a consequence any family of eigenvectors for different eigenvalues is always linearly independent). Therefore the sum of the dimensions of the eigenspaces cannot exceed the dimension n of the space on which T operates, and in particular there cannot be more than n distinct eigenvalues.[36]
Any subspace spanned by eigenvectors of is an invariant subspace of , and the restriction of T to such a subspace is diagonalizable.
The set of eigenvalues of is sometimes called the spectrum of .
Eigenbasis
An eigenbasis for a linear operator that operates on a vector space is a basis for that consists entirely of eigenvectors of (possibly with different eigenvalues). Such a basis exists precisely if the direct sum of the eigenspaces equals the whole space, in which case one can take the union of bases chosen in each of the eigenspaces as eigenbasis. The matrix of T in a given basis is diagonal precisely when that basis is an eigenbasis for T, and for this reason T is called diagonalizable if it admits an eigenbasis.
Dynamic equations
The simplest difference equations have the form

The solution of this equation for x in terms of t is found by using its characteristic equation

which can be found by stacking into matrix form a set of equations consisting of the above difference equation and the k–1 equations  giving a k-dimensional system of the first order in the stacked variable vector
giving a k-dimensional system of the first order in the stacked variable vector ![[x_t, \dots , x_{t-k+1}]](../I/m/bc95f79d202d5e2df37a71ae4598defe.png) in terms of its once-lagged value, and taking the characteristic equation of this system's matrix. This equation gives k characteristic roots
in terms of its once-lagged value, and taking the characteristic equation of this system's matrix. This equation gives k characteristic roots  for use in the solution equation
for use in the solution equation

A similar procedure is used for solving a differential equation of the form

Calculation
Eigenvalues
The eigenvalues of a matrix can be determined by finding the roots of the characteristic polynomial. Explicit algebraic formulas for the roots of a polynomial exist only if the degree is 4 or less. According to the Abel–Ruffini theorem there is no general, explicit and exact algebraic formula for the roots of a polynomial with degree 5 or more.
It turns out that any polynomial with degree is the characteristic polynomial of some companion matrix of order . Therefore, for matrices of order 5 or more, the eigenvalues and eigenvectors cannot be obtained by an explicit algebraic formula, and must therefore be computed by approximate numerical methods.
In theory, the coefficients of the characteristic polynomial can be computed exactly, since they are sums of products of matrix elements; and there are algorithms that can find all the roots of a polynomial of arbitrary degree to any required accuracy.[37] However, this approach is not viable in practice because the coefficients would be contaminated by unavoidable round-off errors, and the roots of a polynomial can be an extremely sensitive function of the coefficients (as exemplified by Wilkinson's polynomial).[37]
Efficient, accurate methods to compute eigenvalues and eigenvectors of arbitrary matrices were not known until the advent of the QR algorithm in 1961. [37] Combining the Householder transformation with the LU decomposition results in an algorithm with better convergence than the QR algorithm. For large Hermitian sparse matrices, the Lanczos algorithm is one example of an efficient iterative method to compute eigenvalues and eigenvectors, among several other possibilities.[37]
Eigenvectors
Once the (exact) value of an eigenvalue is known, the corresponding eigenvectors can be found by finding non-zero solutions of the eigenvalue equation, that becomes a system of linear equations with known coefficients. For example, once it is known that 6 is an eigenvalue of the matrix

we can find its eigenvectors by solving the equation  , that is
, that is
This matrix equation is equivalent to two linear equations
 that is
that is 
Both equations reduce to the single linear equation  . Therefore, any vector of the form
. Therefore, any vector of the form ![[a,2a]'](../I/m/4dc79f4a10f2db113153de91f177b098.png) , for any non-zero real number
, for any non-zero real number  , is an eigenvector of with eigenvalue
, is an eigenvector of with eigenvalue  .
.
The matrix above has another eigenvalue  . A similar calculation shows that the corresponding eigenvectors are the non-zero solutions of
. A similar calculation shows that the corresponding eigenvectors are the non-zero solutions of  , that is, any vector of the form
, that is, any vector of the form ![[b,-3b]'](../I/m/f5594a72b3a622efccff5b2a795d54ad.png) , for any non-zero real number
, for any non-zero real number  .
.
Some numeric methods that compute the eigenvalues of a matrix also determine a set of corresponding eigenvectors as a by-product of the computation.
Generalizations to infinite-dimensional spaces
The definition of eigenvalue of a linear transformation remains valid even if the underlying space is an infinite dimensional Hilbert or Banach space. Namely, a scalar is an eigenvalue if and only if there is some nonzero vector such that .
Eigenfunctions
A widely used class of linear operators acting on infinite dimensional spaces are the differential operators on function spaces. Let be a linear differential operator on the space  of infinitely differentiable real functions of a real argument
of infinitely differentiable real functions of a real argument  . The eigenvalue equation for is the differential equation
. The eigenvalue equation for is the differential equation

The functions that satisfy this equation are commonly called eigenfunctions of . For the derivative operator  , an eigenfunction is a function that, when differentiated, yields a constant times the original function. The solution is an exponential function
, an eigenfunction is a function that, when differentiated, yields a constant times the original function. The solution is an exponential function
including when is zero when it becomes a constant function. Eigenfunctions are an essential tool in the solution of differential equations and many other applied and theoretical fields. For instance, the exponential functions are eigenfunctions of the shift operators. This is the basis of Fourier transform methods for solving problems.
Spectral theory
If is an eigenvalue of , then the operator  is not one-to-one, and therefore its inverse
is not one-to-one, and therefore its inverse  does not exist. The converse is true for finite-dimensional vector spaces, but not for infinite-dimensional vector spaces. In general, the operator may not have an inverse, even if is not an eigenvalue.
does not exist. The converse is true for finite-dimensional vector spaces, but not for infinite-dimensional vector spaces. In general, the operator may not have an inverse, even if is not an eigenvalue.
For this reason, in functional analysis one defines the spectrum of a linear operator as the set of all scalars for which the operator has no bounded inverse. Thus the spectrum of an operator always contains all its eigenvalues, but is not limited to them.
Associative algebras and representation theory
More algebraically, rather than generalizing the vector space to an infinite dimensional space, one can generalize the algebraic object that is acting on the space, replacing a single operator acting on a vector space with an algebra representation – an associative algebra acting on a module. The study of such actions is the field of representation theory.
A closer analog of eigenvalues is given by the representation-theoretical concept of weight, with the analogs of eigenvectors and eigenspaces being weight vectors and weight spaces.
Applications
Eigenvalues of geometric transformations
The following table presents some example transformations in the plane along with their 2×2 matrices, eigenvalues, and eigenvectors.
| scaling | unequal scaling | rotation | horizontal shear | hyperbolic rotation | |
| illustration |  |
 |
 |
 |
 |
| matrix |  |
 |
   |
 |
   |
| characteristic polynomial |
 |
 |
 |
 |
|
| eigenvalues |
 |
  |
  |
 |
  , , |
algebraic multipl. |
 |
  |
|
|
|
geometric multipl. |
 |
  |
|
|
|
| eigenvectors | All non-zero vectors |   |
  |
|
  |
Note that the characteristic equation for a rotation is a quadratic equation with discriminant  , which is a negative number whenever
, which is a negative number whenever  is not an integer multiple of 180°. Therefore, except for these special cases, the two eigenvalues are complex numbers,
is not an integer multiple of 180°. Therefore, except for these special cases, the two eigenvalues are complex numbers,  ; and all eigenvectors have non-real entries. Indeed, except for those special cases, a rotation changes the direction of every nonzero vector in the plane.
; and all eigenvectors have non-real entries. Indeed, except for those special cases, a rotation changes the direction of every nonzero vector in the plane.
Schrödinger equation

 ) and angular momentum (increasing across: s, p, d, ...). The illustration shows the square of the absolute value of the wavefunctions. Brighter areas correspond to higher probability density for a position measurement. The center of each figure is the atomic nucleus, a proton.
) and angular momentum (increasing across: s, p, d, ...). The illustration shows the square of the absolute value of the wavefunctions. Brighter areas correspond to higher probability density for a position measurement. The center of each figure is the atomic nucleus, a proton.An example of an eigenvalue equation where the transformation is represented in terms of a differential operator is the time-independent Schrödinger equation in quantum mechanics:

where , the Hamiltonian, is a second-order differential operator and  , the wavefunction, is one of its eigenfunctions corresponding to the eigenvalue
, the wavefunction, is one of its eigenfunctions corresponding to the eigenvalue  , interpreted as its energy.
, interpreted as its energy.
However, in the case where one is interested only in the bound state solutions of the Schrödinger equation, one looks for within the space of square integrable functions. Since this space is a Hilbert space with a well-defined scalar product, one can introduce a basis set in which and can be represented as a one-dimensional array and a matrix respectively. This allows one to represent the Schrödinger equation in a matrix form.
The bra–ket notation is often used in this context. A vector, which represents a state of the system, in the Hilbert space of square integrable functions is represented by  . In this notation, the Schrödinger equation is:
. In this notation, the Schrödinger equation is:

where is an eigenstate of and represents the eigenvalue. It is an observable self adjoint operator, the infinite dimensional analog of Hermitian matrices. As in the matrix case, in the equation above  is understood to be the vector obtained by application of the transformation to .
is understood to be the vector obtained by application of the transformation to .
Molecular orbitals
In quantum mechanics, and in particular in atomic and molecular physics, within the Hartree–Fock theory, the atomic and molecular orbitals can be defined by the eigenvectors of the Fock operator. The corresponding eigenvalues are interpreted as ionization potentials via Koopmans' theorem. In this case, the term eigenvector is used in a somewhat more general meaning, since the Fock operator is explicitly dependent on the orbitals and their eigenvalues. Thus, if one wants to underline this aspect, one speaks of nonlinear eigenvalue problems. Such equations are usually solved by an iteration procedure, called in this case self-consistent field method. In quantum chemistry, one often represents the Hartree–Fock equation in a non-orthogonal basis set. This particular representation is a generalized eigenvalue problem called Roothaan equations.
Geology and glaciology
In geology, especially in the study of glacial till, eigenvectors and eigenvalues are used as a method by which a mass of information of a clast fabric's constituents' orientation and dip can be summarized in a 3-D space by six numbers. In the field, a geologist may collect such data for hundreds or thousands of clasts in a soil sample, which can only be compared graphically such as in a Tri-Plot (Sneed and Folk) diagram,[38][39] or as a Stereonet on a Wulff Net.[40]
The output for the orientation tensor is in the three orthogonal (perpendicular) axes of space. The three eigenvectors are ordered  by their eigenvalues
by their eigenvalues  ;[41]
;[41]  then is the primary orientation/dip of clast,
then is the primary orientation/dip of clast,  is the secondary and
is the secondary and  is the tertiary, in terms of strength. The clast orientation is defined as the direction of the eigenvector, on a compass rose of 360°. Dip is measured as the eigenvalue, the modulus of the tensor: this is valued from 0° (no dip) to 90° (vertical). The relative values of
is the tertiary, in terms of strength. The clast orientation is defined as the direction of the eigenvector, on a compass rose of 360°. Dip is measured as the eigenvalue, the modulus of the tensor: this is valued from 0° (no dip) to 90° (vertical). The relative values of  ,
,  , and
, and  are dictated by the nature of the sediment's fabric. If
are dictated by the nature of the sediment's fabric. If  , the fabric is said to be isotropic. If
, the fabric is said to be isotropic. If  , the fabric is said to be planar. If
, the fabric is said to be planar. If  , the fabric is said to be linear.[42]
, the fabric is said to be linear.[42]
Principal component analysis

 with a standard deviation of 3 in roughly the
with a standard deviation of 3 in roughly the  direction and of 1 in the orthogonal direction. The vectors shown are unit eigenvectors of the (symmetric, positive-semidefinite) covariance matrix scaled by the square root of the corresponding eigenvalue. (Just as in the one-dimensional case, the square root is taken because the standard deviation is more readily visualized than the variance.
direction and of 1 in the orthogonal direction. The vectors shown are unit eigenvectors of the (symmetric, positive-semidefinite) covariance matrix scaled by the square root of the corresponding eigenvalue. (Just as in the one-dimensional case, the square root is taken because the standard deviation is more readily visualized than the variance.The eigendecomposition of a symmetric positive semidefinite (PSD) matrix yields an orthogonal basis of eigenvectors, each of which has a nonnegative eigenvalue. The orthogonal decomposition of a PSD matrix is used in multivariate analysis, where the sample covariance matrices are PSD. This orthogonal decomposition is called principal components analysis (PCA) in statistics. PCA studies linear relations among variables. PCA is performed on the covariance matrix or the correlation matrix (in which each variable is scaled to have its sample variance equal to one). For the covariance or correlation matrix, the eigenvectors correspond to principal components and the eigenvalues to the variance explained by the principal components. Principal component analysis of the correlation matrix provides an orthonormal eigen-basis for the space of the observed data: In this basis, the largest eigenvalues correspond to the principal components that are associated with most of the covariability among a number of observed data.
Principal component analysis is used to study large data sets, such as those encountered in bioinformatics, data mining, chemical research, psychology, and in marketing. PCA is popular especially in psychology, in the field of psychometrics. In Q methodology, the eigenvalues of the correlation matrix determine the Q-methodologist's judgment of practical significance (which differs from the statistical significance of hypothesis testing; cf. criteria for determining the number of factors). More generally, principal component analysis can be used as a method of factor analysis in structural equation modeling.
Vibration analysis

Eigenvalue problems occur naturally in the vibration analysis of mechanical structures with many degrees of freedom. The eigenvalues are the natural frequencies (or eigenfrequencies) of vibration, and the eigenvectors are the shapes of these vibrational modes. In particular, undamped vibration is governed by

or

that is, acceleration is proportional to position (i.e., we expect to be sinusoidal in time).
In dimensions,  becomes a mass matrix and a stiffness matrix. Admissible solutions are then a linear combination of solutions to the generalized eigenvalue problem
becomes a mass matrix and a stiffness matrix. Admissible solutions are then a linear combination of solutions to the generalized eigenvalue problem

where  is the eigenvalue and
is the eigenvalue and  is the angular frequency. Note that the principal vibration modes are different from the principal compliance modes, which are the eigenvectors of alone. Furthermore, damped vibration, governed by
is the angular frequency. Note that the principal vibration modes are different from the principal compliance modes, which are the eigenvectors of alone. Furthermore, damped vibration, governed by

leads to a so-called quadratic eigenvalue problem,

This can be reduced to a generalized eigenvalue problem by clever use of algebra at the cost of solving a larger system.
The orthogonality properties of the eigenvectors allows decoupling of the differential equations so that the system can be represented as linear summation of the eigenvectors. The eigenvalue problem of complex structures is often solved using finite element analysis, but neatly generalize the solution to scalar-valued vibration problems.
Eigenfaces

In image processing, processed images of faces can be seen as vectors whose components are the brightnesses of each pixel.[43] The dimension of this vector space is the number of pixels. The eigenvectors of the covariance matrix associated with a large set of normalized pictures of faces are called eigenfaces; this is an example of principal components analysis. They are very useful for expressing any face image as a linear combination of some of them. In the facial recognition branch of biometrics, eigenfaces provide a means of applying data compression to faces for identification purposes. Research related to eigen vision systems determining hand gestures has also been made.
Similar to this concept, eigenvoices represent the general direction of variability in human pronunciations of a particular utterance, such as a word in a language. Based on a linear combination of such eigenvoices, a new voice pronunciation of the word can be constructed. These concepts have been found useful in automatic speech recognition systems for speaker adaptation.
Tensor of moment of inertia
In mechanics, the eigenvectors of the moment of inertia tensor define the principal axes of a rigid body. The tensor of moment of inertia is a key quantity required to determine the rotation of a rigid body around its center of mass.
Stress tensor
In solid mechanics, the stress tensor is symmetric and so can be decomposed into a diagonal tensor with the eigenvalues on the diagonal and eigenvectors as a basis. Because it is diagonal, in this orientation, the stress tensor has no shear components; the components it does have are the principal components.
Graphs
In spectral graph theory, an eigenvalue of a graph is defined as an eigenvalue of the graph's adjacency matrix , or (increasingly) of the graph's Laplacian matrix due to its Discrete Laplace operator, which is either  (sometimes called the combinatorial Laplacian) or
(sometimes called the combinatorial Laplacian) or  (sometimes called the normalized Laplacian), where is a diagonal matrix with
(sometimes called the normalized Laplacian), where is a diagonal matrix with  equal to the degree of vertex
equal to the degree of vertex  , and in
, and in  , the th diagonal entry is
, the th diagonal entry is  . The th principal eigenvector of a graph is defined as either the eigenvector corresponding to the th largest or th smallest eigenvalue of the Laplacian. The first principal eigenvector of the graph is also referred to merely as the principal eigenvector.
. The th principal eigenvector of a graph is defined as either the eigenvector corresponding to the th largest or th smallest eigenvalue of the Laplacian. The first principal eigenvector of the graph is also referred to merely as the principal eigenvector.
The principal eigenvector is used to measure the centrality of its vertices. An example is Google's PageRank algorithm. The principal eigenvector of a modified adjacency matrix of the World Wide Web graph gives the page ranks as its components. This vector corresponds to the stationary distribution of the Markov chain represented by the row-normalized adjacency matrix; however, the adjacency matrix must first be modified to ensure a stationary distribution exists. The second smallest eigenvector can be used to partition the graph into clusters, via spectral clustering. Other methods are also available for clustering.
Basic reproduction number
The basic reproduction number ( ) is a fundamental number in the study of how infectious diseases spread. If one infectious person is put into a population of completely susceptible people, then is the average number of people that one typical infectious person will infect. The generation time of an infection is the time,
) is a fundamental number in the study of how infectious diseases spread. If one infectious person is put into a population of completely susceptible people, then is the average number of people that one typical infectious person will infect. The generation time of an infection is the time,  , from one person becoming infected to the next person becoming infected. In a heterogeneous population, the next generation matrix defines how many people in the population will become infected after time has passed. is then the largest eigenvalue of the next generation matrix.[44][45]
, from one person becoming infected to the next person becoming infected. In a heterogeneous population, the next generation matrix defines how many people in the population will become infected after time has passed. is then the largest eigenvalue of the next generation matrix.[44][45]
See also
- Antieigenvalue theory
- Eigenplane
- Eigenvalue algorithm
- Introduction to eigenstates
- Jordan normal form
- List of numerical analysis software
- Nonlinear eigenproblem
- Quadratic eigenvalue problem
- Singular value
Notes
- ↑ Burden & Faires (1993, p. 401)
- ↑ Herstein (1964, pp. 228,229)
- ↑ Nering (1970, p. 38)
- ↑ William H. Press, Saul A. Teukolsky, William T. Vetterling, Brian P. Flannery (2007), Numerical Recipes: The Art of Scientific Computing, Chapter 11: Eigensystems., pages=563–597. Third edition, Cambridge University Press. ISBN 9780521880688
- ↑ Wolfram Research, Inc. (2010) Eigenvector. Accessed on 2010-01-29.
- ↑ Anton (1987, pp. 305,307)
- ↑ Nering (1970, p. 107)
- ↑ Note:
- In 1751, Leonhard Euler proved that any body has a principal axis of rotation: Leonhard Euler (presented: October 1751 ; published: 1760) "Du mouvement d'un corps solide quelconque lorsqu'il tourne autour d'un axe mobile" (On the movement of any solid body while it rotates around a moving axis), Histoire de l'Académie royale des sciences et des belles lettres de Berlin, pp.176-227. On p. 212, Euler proves that any body contains a principal axis of rotation: "Théorem. 44. De quelque figure que soit le corps, on y peut toujours assigner un tel axe, qui passe par son centre de gravité, autour duquel le corps peut tourner librement & d'un mouvement uniforme." (Theorem. 44. Whatever be the shape of the body, one can always assign to it such an axis, which passes through its center of gravity, around which it can rotate freely and with a uniform motion.)
- In 1755, Johann Andreas Segner proved that any body has three principal axes of rotation: Johann Andreas Segner, Specimen theoriae turbinum [Essay on the theory of tops (i.e., rotating bodies)] ( Halle ("Halae"), (Germany) : Gebauer, 1755). On p. XXVIIII (i.e., 29), Segner derives a third-degree equation in t, which proves that a body has three principal axes of rotation. He then states (on the same page): "Non autem repugnat tres esse eiusmodi positiones plani HM, quia in aequatione cubica radices tres esse possunt, et tres tangentis t valores." (However, it is not inconsistent [that there] be three such positions of the plane HM, because in cubic equations, [there] can be three roots, and three values of the tangent t.)
- The relevant passage of Segner's work was discussed briefly by Arthur Cayley. See: A. Cayley (1862) "Report on the progress of the solution of certain special problems of dynamics," Report of the Thirty-second meeting of the British Association for the Advancement of Science; held at Cambridge in October 1862, 32 : 184-252 ; see especially pages 225-226.
- ↑ See Hawkins 1975, §2
- 1 2 3 4 See Hawkins 1975, §3
- 1 2 3 See Kline 1972, pp. 807–808
- ↑ See Kline 1972, p. 673
- ↑ See Kline 1972, pp. 715–716
- ↑ See Kline 1972, pp. 706–707
- ↑ See Kline 1972, p. 1063
- ↑ See:
- David Hilbert (1904) "Grundzüge einer allgemeinen Theorie der linearen Integralgleichungen. (Erste Mitteilung)" (Fundamentals of a general theory of linear integral equations. (First report)), Nachrichten von der Gesellschaft der Wissenschaften zu Göttingen, Mathematisch-Physikalische Klasse (News of the Philosophical Society at Göttingen, mathematical-physical section), pp. 49-91. From page 51: "Insbesondere in dieser ersten Mitteilung gelange ich zu Formeln, die die Entwickelung einer willkürlichen Funktion nach gewissen ausgezeichneten Funktionen, die ich Eigenfunktionen nenne, liefern: … (In particular, in this first report I arrive at formulas that provide the [series] development of an arbitrary function in terms of some distinctive functions, which I call eigenfunctions: … ) Later on the same page: "Dieser Erfolg ist wesentlich durch den Umstand bedingt, daß ich nicht, wie es bisher geschah, in erster Linie auf den Beweis für die Existenz der Eigenwerte ausgehe, … " (This success is mainly attributable to the fact that I do not, as it has happened until now, first of all aim at a proof of the existence of eigenvalues, … )
- For the origin and evolution of the terms eigenvalue, characteristic value, etc., see: Earliest Known Uses of Some of the Words of Mathematics (E)
- ↑ See Aldrich 2006
- ↑ Francis, J. G. F. (1961), "The QR Transformation, I (part 1)", The Computer Journal 4 (3): 265–271, doi:10.1093/comjnl/4.3.265 and Francis, J. G. F. (1962), "The QR Transformation, II (part 2)", The Computer Journal 4 (4): 332–345, doi:10.1093/comjnl/4.4.332
- ↑ Kublanovskaya, Vera N. (1961), "On some algorithms for the solution of the complete eigenvalue problem", USSR Computational Mathematics and Mathematical Physics 3: 637–657. Also published in: "О некоторых алгорифмах для решения полной проблемы собственных значений" [On certain algorithms for the solution of the complete eigenvalue problem], Журнал вычислительной математики и математической физики (Journal of Computational Mathematics and Mathematical Physics) 1 (4), 1961: 555–570
- ↑ See Golub & van Loan 1996, §7.3; Meyer 2000, §7.3
- ↑ Fraleigh (1976, p. 358)
- 1 2 3 Golub & Van Loan (1996, p. 316)
- 1 2 3 Nering (1970, p. 107)
- ↑ Beauregard & Fraleigh (1973, p. 307)
- ↑ Herstein (1964, p. 272)
- ↑ Nering (1970, pp. 115-116)
- ↑ Beauregard & Fraleigh (1973, p. 307)
- ↑ Herstein (1964, p. 290)
- ↑ Nering (1970, p. 116)
- ↑ See Korn & Korn 2000, Section 14.3.5a; Friedberg, Insel & Spence 1989, p. 217
- ↑ Axler, Sheldon, "Ch. 5", Linear Algebra Done Right (2nd ed.), p. 77
- ↑ Shilov 1977, p. 109
- ↑ Lemma for the eigenspace
- ↑ Nering (1970, p. 107)
- ↑ Schaum's Easy Outline of Linear Algebra, p. 111
- ↑ For a proof of this lemma, see Roman 2008, Theorem 8.2 on p. 186; Shilov 1977, p. 109; Hefferon 2001, p. 364; Beezer 2006, Theorem EDELI on p. 469; and Lemma for linear independence of eigenvectors
- 1 2 3 4 Trefethen, Lloyd N.; Bau, David (1997), Numerical Linear Algebra, SIAM
- ↑ Graham, D.; Midgley, N. (2000), "Graphical representation of particle shape using triangular diagrams: an Excel spreadsheet method", Earth Surface Processes and Landforms 25 (13): 1473–1477, Bibcode:2000ESPL...25.1473G, doi:10.1002/1096-9837(200012)25:13<1473::AID-ESP158>3.0.CO;2-C
- ↑ Sneed, E. D.; Folk, R. L. (1958), "Pebbles in the lower Colorado River, Texas, a study of particle morphogenesis", Journal of Geology 66 (2): 114–150, Bibcode:1958JG.....66..114S, doi:10.1086/626490
- ↑ Knox-Robinson, C.; Gardoll, Stephen J. (1998), "GIS-stereoplot: an interactive stereonet plotting module for ArcView 3.0 geographic information system", Computers & Geosciences 24 (3): 243, Bibcode:1998CG.....24..243K, doi:10.1016/S0098-3004(97)00122-2
- ↑ Stereo32 software
- ↑ Benn, D.; Evans, D. (2004), A Practical Guide to the study of Glacial Sediments, London: Arnold, pp. 103–107
- ↑ Xirouhakis, A.; Votsis, G.; Delopoulus, A. (2004), Estimation of 3D motion and structure of human faces (PDF), National Technical University of Athens
- ↑ Diekmann O, Heesterbeek JAP, Metz JAJ (1990), "On the definition and the computation of the basic reproduction ratio R0 in models for infectious diseases in heterogeneous populations", Journal of Mathematical Biology 28 (4): 365–382, doi:10.1007/BF00178324, PMID 2117040
- ↑ Odo Diekmann and J. A. P. Heesterbeek (2000), Mathematical epidemiology of infectious diseases, Wiley series in mathematical and computational biology, West Sussex, England: John Wiley & Sons
References
- Akivis, Max A.; Goldberg, Vladislav V. (1969), Tensor calculus, Russian, Science Publishers, Moscow
- Aldrich, John (2006), "Eigenvalue, eigenfunction, eigenvector, and related terms", in Jeff Miller (Editor), Earliest Known Uses of Some of the Words of Mathematics, retrieved 2006-08-22
- Alexandrov, Pavel S. (1968), Lecture notes in analytical geometry, Russian, Science Publishers, Moscow
- Anton, Howard (1987), Elementary Linear Algebra (5th ed.), New York: Wiley, ISBN 0-471-84819-0
- Beauregard, Raymond A.; Fraleigh, John B. (1973), A First Course In Linear Algebra: with Optional Introduction to Groups, Rings, and Fields, Boston: Houghton Mifflin Co., ISBN 0-395-14017-X
- Beezer, Robert A. (2006), A first course in linear algebra, Free online book under GNU licence, University of Puget Sound
- Bowen, Ray M.; Wang, Chao-Cheng (1980), Linear and multilinear algebra, Plenum Press, New York, ISBN 0-306-37508-7
- Brown, Maureen (October 2004), Illuminating Patterns of Perception: An Overview of Q Methodology
- Burden, Richard L.; Faires, J. Douglas (1993), Numerical Analysis (5th ed.), Boston: Prindle, Weber and Schmidt, ISBN 0-534-93219-3
- Carter, Tamara A.; Tapia, Richard A.; Papaconstantinou, Anne, Linear Algebra: An Introduction to Linear Algebra for Pre-Calculus Students, Rice University, Online Edition, retrieved 2008-02-19
- Cohen-Tannoudji, Claude (1977), "Chapter II. The mathematical tools of quantum mechanics", Quantum mechanics, John Wiley & Sons, ISBN 0-471-16432-1
- Curtis, Charles W. (1999), Linear Algebra: An Introductory Approach (4th ed.), Springer, ISBN 0-387-90992-3
- Demmel, James W. (1997), Applied numerical linear algebra, SIAM, ISBN 0-89871-389-7
- Fraleigh, John B. (1976), A First Course In Abstract Algebra (2nd ed.), Reading: Addison-Wesley, ISBN 0-201-01984-1
- Fraleigh, John B.; Beauregard, Raymond A. (1995), Linear algebra (3rd ed.), Addison-Wesley Publishing Company, ISBN 0-201-83999-7
- Friedberg, Stephen H.; Insel, Arnold J.; Spence, Lawrence E. (1989), Linear algebra (2nd ed.), Englewood Cliffs, New Jersey 07632: Prentice Hall, ISBN 0-13-537102-3
- Gelfand, I. M. (1971), Lecture notes in linear algebra, Russian, Science Publishers, Moscow
- Gohberg, Israel; Lancaster, Peter; Rodman, Leiba (2005), Indefinite linear algebra and applications, Basel-Boston-Berlin: Birkhäuser Verlag, ISBN 3-7643-7349-0
- Golub, Gene F.; van der Vorst, Henk A. (2000), "Eigenvalue computation in the 20th century", Journal of Computational and Applied Mathematics 123: 35–65, Bibcode:2000JCoAM.123...35G, doi:10.1016/S0377-0427(00)00413-1
- Golub, Gene H.; Van Loan, Charles F. (1996), Matrix computations (3rd ed.), Johns Hopkins University Press, Baltimore, Maryland, ISBN 978-0-8018-5414-9
- Greub, Werner H. (1975), Linear Algebra (4th ed.), Springer-Verlag, New York, ISBN 0-387-90110-8
- Halmos, Paul R. (1987), Finite-dimensional vector spaces (8th ed.), New York: Springer-Verlag, ISBN 0-387-90093-4
- Hawkins, T. (1975), "Cauchy and the spectral theory of matrices", Historia Mathematica 2: 1–29, doi:10.1016/0315-0860(75)90032-4
- Hefferon, Jim (2001), Linear Algebra, Online book, St Michael's College, Colchester, Vermont, USA
- Herstein, I. N. (1964), Topics In Algebra, Waltham: Blaisdell Publishing Company, ISBN 978-1114541016
- Horn, Roger A.; Johnson, Charles F. (1985), Matrix analysis, Cambridge University Press, ISBN 0-521-30586-1
- Kline, Morris (1972), Mathematical thought from ancient to modern times, Oxford University Press, ISBN 0-19-501496-0
- Korn, Granino A.; Korn, Theresa M. (2000), "Mathematical Handbook for Scientists and Engineers: Definitions, Theorems, and Formulas for Reference and Review", New York: McGraw-Hill (2nd Revised ed.) (Dover Publications), Bibcode:1968mhse.book.....K, ISBN 0-486-41147-8
- Kuttler, Kenneth (2007), An introduction to linear algebra (PDF), Online e-book in PDF format, Brigham Young University
- Lancaster, P. (1973), Matrix theory, Russian, Moscow, Russia: Science Publishers
- Larson, Ron; Edwards, Bruce H. (2003), Elementary linear algebra (5th ed.), Houghton Mifflin Company, ISBN 0-618-33567-6
- Lipschutz, Seymour (1991), Schaum's outline of theory and problems of linear algebra, Schaum's outline series (2nd ed.), New York: McGraw-Hill Companies, ISBN 0-07-038007-4
- Meyer, Carl D. (2000), Matrix analysis and applied linear algebra, Society for Industrial and Applied Mathematics (SIAM), Philadelphia, ISBN 978-0-89871-454-8
- Nering, Evar D. (1970), Linear Algebra and Matrix Theory (2nd ed.), New York: Wiley, LCCN 76091646
- (Russian)Pigolkina, T. S.; Shulman, V. S. (1977). "Eigenvalue". In Vinogradov, I. M. Mathematical Encyclopedia 5. Moscow: Soviet Encyclopedia.
- Roman, Steven (2008), Advanced linear algebra (3rd ed.), New York: Springer Science + Business Media, LLC, ISBN 978-0-387-72828-5
- Sharipov, Ruslan A. (1996), Course of Linear Algebra and Multidimensional Geometry: the textbook, arXiv:math/0405323, Bibcode:2004math......5323S, ISBN 5-7477-0099-5
- Shilov, Georgi E. (1977), Linear algebra, Translated and edited by Richard A. Silverman, New York: Dover Publications, ISBN 0-486-63518-X
- Shores, Thomas S. (2007), Applied linear algebra and matrix analysis, Springer Science+Business Media, LLC, ISBN 0-387-33194-8
- Strang, Gilbert (1993), Introduction to linear algebra, Wellesley-Cambridge Press, Wellesley, Massachusetts, ISBN 0-9614088-5-5
- Strang, Gilbert (2006), Linear algebra and its applications, Thomson, Brooks/Cole, Belmont, California, ISBN 0-03-010567-6
External links
| The Wikibook Linear Algebra has a page on the topic of: Eigenvalues and Eigenvectors |
| The Wikibook The Book of Mathematical Proofs has a page on the topic of: Algebra/Linear Transformations |
- What are Eigen Values? – non-technical introduction from PhysLink.com's "Ask the Experts"
- Eigen Values and Eigen Vectors Numerical Examples – Tutorial and Interactive Program from Revoledu.
- Introduction to Eigen Vectors and Eigen Values – lecture from Khan Academy
- Hill, Roger (2009). "λ – Eigenvalues". Sixty Symbols. Brady Haran for the University of Nottingham.
- "A Beginner's Guide to Eigenvectors". Deeplearning4j. 2015.
Theory
- Hazewinkel, Michiel, ed. (2001), "Eigen value", Encyclopedia of Mathematics, Springer, ISBN 978-1-55608-010-4
- Hazewinkel, Michiel, ed. (2001), "Eigen vector", Encyclopedia of Mathematics, Springer, ISBN 978-1-55608-010-4
- Eigenvalue (of a matrix) at PlanetMath.org.
- Eigenvector – Wolfram MathWorld
- Eigen Vector Examination working applet
- Same Eigen Vector Examination as above in a Flash demo with sound
- Computation of Eigenvalues
- Numerical solution of eigenvalue problems Edited by Zhaojun Bai, James Demmel, Jack Dongarra, Axel Ruhe, and Henk van der Vorst
- Eigenvalues and Eigenvectors on the Ask Dr. Math forums: ,
Online calculators
- Eigenvalues calculator by www.mathstools.com
- arndt-bruenner.de
- bluebit.gr
- wims.unice.fr
- EngineerJS
Demonstration applets
| ||||||||||||||||||