Double integrator
In systems and control theory, the double integrator is a canonical example of a second-order control system.[1] It models the dynamics of a simple mass in one-dimensional space under the effect of a time-varying force input  .
.
State space representation
The normalized state space model of a double integrator takes the form
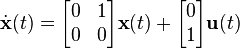

According to this model, the input is the second derivative of the output  , hence the name double integrator.
, hence the name double integrator.
Transfer function representation
Taking the Laplace transform of the state space input-output equation, we see that the transfer function of the double integrator is given by

References
- ↑ Venkatesh G. Rao and Dennis S. Bernstein (2001). "Naive control of the double integrator" (PDF). IEEE Control Systems Magazine. Retrieved 2012-03-04.
This article is issued from Wikipedia - version of the Wednesday, July 02, 2014. The text is available under the Creative Commons Attribution/Share Alike but additional terms may apply for the media files.