Critical point (mathematics)
In mathematics, a critical point or stationary point of a differentiable function of a real or complex variable is any value in its domain where its derivative is 0 or undefined.[1][2] For a differentiable function of several real variables, a critical point is a value in its domain where all partial derivatives are zero.[3] The value of the function at a critical point is a critical value.
The interest of this notion lies in the fact that the points where the function has local extrema are critical points.
This definition extends to differentiable maps between Rm and Rn, a critical point being, in this case, a point where the rank of the Jacobian matrix is not maximal. It extends further to differentiable maps between differentiable manifolds, as the points where the rank of the Jacobian matrix decreases. In this case, critical points are also called bifurcation points.
In particular, if C is a plane curve, defined by an implicit equation f(x,y) = 0, the critical points of the projection onto the x-axis, parallel to the y-axis are the points where the tangent to C are parallel to the y-axis, that is the points where  In other words, the critical points are those where the implicit function theorem does not apply.
In other words, the critical points are those where the implicit function theorem does not apply.
The notion of a critical point allows the mathematical description of an astronomical phenomenon that was unexplained before the time of Copernicus. A stationary point in the orbit of a planet is a point of the trajectory of the planet on the celestial sphere, where the motion of the planet seems to stop before restarting in the other direction. This occurs because of a critical point of the projection of the orbit into the ecliptic circle.
Critical point of a single variable function
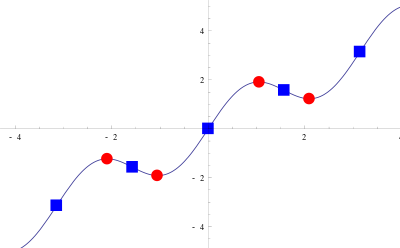
A critical point or stationary point of a differentiable function of a single real variable, f(x), is a value x0 in the domain of f where its derivative is 0: f ′(x0) = 0. A critical value is the image under f of a critical point. These concepts may be visualized through the graph of f: at a critical point, the graph has a horizontal tangent and the derivative of the function is zero.
Although it is easily visualized on the graph (which is a curve), the notion of critical point of a function must not be confused with the notion of critical point, in some direction, of a curve (see below for a detailed definition). If g(x,y) is a differentiable function of two variables, then g(x,y) = 0 is the implicit equation of a curve. A critical point of such a curve, for the projection parallel to the y-axis (the map (x, y) → x), is a point of the curve where  This means that the tangent of the curve is parallel to the y-axis, and that, at this point, g does not define an implicit function from x to y (see implicit function theorem). If (x0, y0) is such a critical point, then x0 is the corresponding critical value. Such a critical point is also called a bifurcation point, as, generally, when x varies, there are two branches of the curve on a side of x0 and zero on the other side.
This means that the tangent of the curve is parallel to the y-axis, and that, at this point, g does not define an implicit function from x to y (see implicit function theorem). If (x0, y0) is such a critical point, then x0 is the corresponding critical value. Such a critical point is also called a bifurcation point, as, generally, when x varies, there are two branches of the curve on a side of x0 and zero on the other side.
It follows from these definitions that the function f(x) has a critical point x0 with critical value y0, if and only if (x0, y0) is a critical point of its graph for the projection parallel to the x-axis, with the same critical value y0.
For example, the critical points of the unit circle of equation x2 + y2 - 1 = 0 are (0, 1) and (0, -1) for the projection parallel to the y-axis, and (1, 0) and (-1, 0) for the direction parallel to the x-axis. If one considers the upper half circle as the graph of the function  then x = 0 is the unique critical point, with critical value 1. The critical points of the circle for the projection parallel to the y-axis correspond exactly to the points where the derivative of f is not defined.
then x = 0 is the unique critical point, with critical value 1. The critical points of the circle for the projection parallel to the y-axis correspond exactly to the points where the derivative of f is not defined.
Some authors define the critical points of a function f as the x-values for which the graph has a critical point for the projection parallel to either axis. In the above example of the upper half circle, the critical points for this enlarged definition are -1, 0 and -1. Such a definition appears, usually, only in elementary textbooks, when the critical points are defined before any definition of other curves than graphs of functions, and when functions of several variables are not considered (the enlarged definition does not extend to this case).
Examples
- The function f(x) = x2 + 2x + 3 is differentiable everywhere, with the derivative f ′(x) = 2x + 2. This function has a unique critical point −1, because it is the unique number x0 for which 2x0 + 2 = 0. This point is a global minimum of f. The corresponding critical value is f(−1) = 2. The graph of f is a concave up parabola, the critical point is the abscissa of the vertex, where the tangent line is horizontal, and the critical value is the ordinate of the vertex and may be represented by the intersection of this tangent line and the y-axis.
- The function f(x) = x2/3 is defined for all x and differentiable for x ≠ 0, with the derivative f ′(x) = 2x−1/3/3. Since f ′(x) ≠ 0 for x ≠ 0, the only critical point of f is x = 0. The graph of the function f has a cusp at this point with vertical tangent. The corresponding critical value is f(0) = 0.
- The function f(x) = x3 − 3x + 1 is differentiable everywhere, with the derivative f ′(x) = 3x2 − 3. It has two critical points, at x = −1 and x = 1. The corresponding critical values are f(−1) = 3, which is a local maximum value, and f(1) = −1, which is a local minimum value of f. This function has no global maximum or minimum. Since f(2) = 3, we see that a critical value may also be attained at a non-critical point. Geometrically, this means that a horizontal tangent line to the graph at one point (x = −1) may intersect the graph at an acute angle at another point (x = 2).
- The function f(x) = 1/x has no critical points. The point x = 0 is not considered as a critical point because it is not included in the function's domain.
Location of critical points
By the Gauss-Lucas theorem, all of a polynomial function's critical points in the complex plane are within the convex hull of the roots of the function. Thus for a polynomial function with only real roots, all critical points are real and are between the greatest and smallest roots.
Sendov's conjecture asserts that, if all of a function's roots lie in the unit disk in the complex plane, then there is at least one critical point within unit distance of any given root.
Critical points of an implicit curve
Critical points play an important role in the study of plane curves defined by implicit equations, in particular for sketching them and determining their topology. The notion of critical point that is used in this section, may seem different from that of previous section. In fact it is the specialization to a simple case of the general notion of critical point given below.
Thus, we consider a curve C defined by an implicit equation  where f is a differentiable function of two variables, commonly a bivariate polynomial. The points of the curve are the points of the Euclidean plane whose Cartesian coordinates satisfy the equation. There are two standard projections
where f is a differentiable function of two variables, commonly a bivariate polynomial. The points of the curve are the points of the Euclidean plane whose Cartesian coordinates satisfy the equation. There are two standard projections  and
and  , defined by
, defined by  and
and  that map the curve onto the coordinate axes. They are called the projection parallel to the y-axis and the projection parallel to the x-axis, respectively.
that map the curve onto the coordinate axes. They are called the projection parallel to the y-axis and the projection parallel to the x-axis, respectively.
A point of C is critical for , if the tangent to C exists and is parallel to the y-axis. In that case, the images by of the critical point and of the tangent are the same point of the x-axis, called the critical value. Thus a point is critical for if its coordinates are solution of the system of equations
This implies that this definition is a special case of the general definition of a critical point, which is given below.
The definition of a critical point for is similar. One should note that, if C is the graph of a function  , then (x, y) is critical for if and only if x is a critical point of f, and that the critical values are the same.
, then (x, y) is critical for if and only if x is a critical point of f, and that the critical values are the same.
Some authors define the critical points of C as the points that are critical for either or , although they depend not only on C, but also on the choice of the coordinate axes. It depends also on the authors if the singular points are considered as critical points. In fact the singular points are the points that satisfy
 ,
,
and are thus solutions of either system of equations characterizing the critical points. With this more general definition, the critical points for are exactly the points where the implicit function theorem does not apply.
Use of the discriminant
When the curve C is algebraic, that is when it is defined by a bivariate polynomial f, then the discriminant is a useful tool to compute the critical points.
Here we consider only the projection  Similar results apply to by exchanging x and y.
Similar results apply to by exchanging x and y.
Let
 be the discriminant of f viewed as a polynomial in y with coefficients that are polynomials in x. This discriminant is thus a polynomial in x which has the critical values of among its roots.
be the discriminant of f viewed as a polynomial in y with coefficients that are polynomials in x. This discriminant is thus a polynomial in x which has the critical values of among its roots.
More precisely, a simple root of is either a critical value of such the corresponding critical point is a point which is not singular nor an inflection point, or the x-coordinate of an asymptote which is parallel to the y-axis and is tangent "at infinity" to an inflection point (inflexion asymptote).
A multiple root of the discriminant correspond either to several critical points or inflection asymptotes sharing the same critical value, or to an critical point which is also an inflection point, or to a singular point.
Several variables
For a continuously differentiable function of several real variables, a point P (that is a set of values for the input variables, which is viewed as a point in Rn) is critical if all of the partial derivatives of the function are zero at P, or, equivalently, if its gradient is zero. The critical values are the values of the function at the critical points.
If the function is smooth, or, at least twice continuously differentiable, a critical point may be either a local maximum, a local minimum or a saddle point. The different cases may be distinguished by considering the eigenvalues of the Hessian matrix of second derivatives.
A critical point at which the Hessian matrix is nonsingular is said to be nondegenerate, and the signs of the eigenvalues of the Hessian determine the local behavior of the function. In the case of a function of a single variable, the Hessian is simply the second derivative, viewed as a 1×1-matrix, which is nonsingular if and only if it is not zero. In this case, a non-degenerate critical point is a local maximum or a local minimum, depending on the sign of the second derivative, which is positive for a local minimum and negative for a local maximum. If the second derivative is null, the critical point is generally an inflection point, but may also be an undulation point, which may be a local minimum or a local maximum.
For a function of n variables, the number of negative eigenvalues of the Hessian matrix at a critical point is called the index of the critical point. A non-degenerate critical point is a local maximum if and only if the index is n, or, equivalently, if the Hessian matrix is negative definite; it is a local minimum if the index is zero, or, equivalently, if the Hessian matrix is positive definite. For the other values of the index, a non-degenerate critical point is a saddle point, that is a point which is a maximum in some directions and a minimum in others.
Application to optimization
By Fermat's theorem, all local maxima and minima of a differentiable function occur at critical points. Therefore, to find the local maxima and minima, it suffices, theoretically, to compute the zeros of the gradient and the eigenvalues of the Hessian matrix at these zeros. This does not work well in practice because it requires the solution of a nonlinear system of simultaneous equations, which is a difficult task. The usual numerical algorithms are much more efficient for finding local extrema, but cannot certify that all extrema have been found. In particular, in global optimization, these methods cannot certify that the output is really the global optimum.
When the function to minimize is a multivariate polynomial, the critical points and the critical values are solutions of a system of polynomial equations, and modern algorithms for solving such systems provide competitive certified methods for finding the global minimum.
Critical point of a differentiable map
Given a differentiable map f from Rm into Rn, the critical points of f are the points of Rm, where the rank of the Jacobian matrix of f is not maximal.[4] The image of a critical point under f is a called a critical value. A point in the complement of the set of critical values is called a regular value. Sard's theorem states that the set of critical values of a smooth map has measure zero. In particular, if n = 1, there is a finite number of critical values in each bounded interval.
Some authors[5] give a slightly different definition: a critical point of f is a point of Rm where the rank of the Jacobian matrix of f is less than n. With this convention, all points are critical when m < n.
These definitions extend to differential maps between differentiable manifolds in the following way. Let  be a differential map between two manifolds V and W of respective dimensions m and n. In the neighborhood of a point p of V and of f(p), charts are diffeomorphisms
be a differential map between two manifolds V and W of respective dimensions m and n. In the neighborhood of a point p of V and of f(p), charts are diffeomorphisms  and
and  The point p is critical for f if
The point p is critical for f if  is critical for
is critical for  This definition does not depend on the choice of the charts because the transitions maps being diffeomorphisms, their Jacobian matrices are invertible and multiplying by them does not modify the rank of the Jacobian matrix of If M is a Hilbert manifold (not necessarily finite dimensional) and f is a real-valued function then we say that p is a critical point of f if f is not a submersion at p.[6]
This definition does not depend on the choice of the charts because the transitions maps being diffeomorphisms, their Jacobian matrices are invertible and multiplying by them does not modify the rank of the Jacobian matrix of If M is a Hilbert manifold (not necessarily finite dimensional) and f is a real-valued function then we say that p is a critical point of f if f is not a submersion at p.[6]
Application to topology
Critical points are fundamental for studying the topology of manifolds and real algebraic varieties. In particular, they are the basic tool for Morse theory and catastrophe theory.
The link between critical points and topology already appears at a lower level of abstraction. For example, let  be a sub-manifold of
be a sub-manifold of  and P be a point outside
and P be a point outside  The square of the distance to P of a point of is a differential map such that each connected component of contains at least a critical point, where the distance is minimal. It follows that the number of connected components of is bounded above by the number of critical points.
The square of the distance to P of a point of is a differential map such that each connected component of contains at least a critical point, where the distance is minimal. It follows that the number of connected components of is bounded above by the number of critical points.
In the case of real algebraic varieties, this observation associated with Bézout's theorem allows us to bound the number of connected components by a function of the degrees of the polynomials that define the variety.
See also
References
- ↑ Stewart, James (2008). Calculus: Early Transcendentals (6th ed.). Brooks/Cole. ISBN 0-495-01166-5.
- ↑ Larson, Ron; Edwards, Bruce H. (2009). Calculus (9th ed.). Brooks/Cole. ISBN 0-547-16702-4.
- ↑ Adams, A. Adams; Essex, Christopher (2009). Calculus: A Complete Course. Pearson Prentice Hall. p. 744. ISBN 978-0-321-54928-0.
- ↑ Carmo, Manfredo Perdigão do (1976). Differential geometry of curves and surfaces. Upper Saddle River, NJ: Prentice-Hall. ISBN 0-13-212589-7.
- ↑ Lafontaine, Jacques (2015). An Introduction to Differential Manifolds. Springer International Publishing. ISBN 978-3-319-20734-6.
- ↑ Serge Lang, Fundamentals of Differential Geometry p. 186