C3 linearization
In computing, the C3 superclass linearization is an algorithm used primarily to obtain the order in which methods should be inherited (the "linearization") in the presence of multiple inheritance, and is often termed "MRO" for Method Resolution Order. The name C3 refers to the three important properties of the resulting linearization: a consistent extended precedence graph, preservation of local precedence order, and fitting the monotonicity criterion. (The name "C3" is not an initialism.) It was first published at the 1996 OOPSLA conference, in a paper entitled "A Monotonic Superclass Linearization for Dylan".[1] It was adapted to the Open Dylan implementation in January 2012[2] following an enhancement proposal.[3] It has been chosen as the default algorithm for method resolution in Python 2.3 (and newer),[4][5] Perl 6,[6] and Parrot.[7] It is also available as an alternative, non-default MRO in the core of Perl 5 starting with version 5.10.0.[8] An extension implementation for earlier versions of Perl 5 named Class::C3 exists on CPAN.[9]
Description
The C3 superclass linearization of a class is the sum of the class plus a unique merge of the linearizations of its parents and a list of the parents itself. The list of parents as the last argument to the merge process preserves the local precedence order of direct parent classes.
The merge of parents' linearizations and parents list is done by selecting the first head of the lists which does not appear in the tail of any of the lists. Note, that a good head may appear as the first element in multiple lists at the same time, but it is forbidden to appear anywhere else. The selected element is removed from all the lists where it appears as a head and appended to the output list. The process of selecting and removing a good head to extend the output list is repeated until all remaining lists are exhausted. If at some point no good head can be selected, because the heads of all remaining lists appear in any one tail of the lists, then the merge is impossible to compute due to cyclic dependencies in the inheritance hierarchy and no linearization of the original class exists.
A naive divide and conquer approach to computing the linearization of a class may invoke the algorithm recursively to find the linearizations of parent classes for the merge-subroutine. However, this will result in an infinitely looping recursion in the presence of a cyclic class hierarchy. To detect such a cycle and to break the infinite recursion (and to reuse the results of previous computations as an optimization), the recursive invocation should be shielded against re-entrance of a previous argument by means of a cache or memoization.
Example
Given
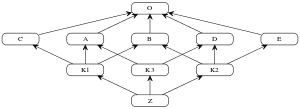
class O class A extends O class B extends O class C extends O class D extends O class E extends O class K1 extends A, B, C class K2 extends D, B, E class K3 extends D, A class Z extends K1, K2, K3
the linearization of Z is computed as
L(O) := [O] // the linearization of O is trivially the singleton list [O], because O has no parents L(A) := [A] + merge(L(O), [O]) // the linearization of A is A plus the merge of its parents' linearizations with the list of parents... = [A] + merge([O], [O]) = [A, O] // ...which simply prepends A to its single parent's linearization L(B) := [B, O] // linearizations of B, C, D and E are computed similar to that of A L(C) := [C, O] L(D) := [D, O] L(E) := [E, O] L(K1) := [K1] + merge(L(A), L(B), L(C), [A, B, C]) // first, find the linearizations of K1's parents, L(A), L(B), and L(C), and merge them with the parent list [A, B, C] = [K1] + merge([A, O], [B, O], [C, O], [A, B, C]) // class A is a good candidate for the first merge step, because it only appears as the head of the first and last lists = [K1, A] + merge([O], [B, O], [C, O], [B, C]) // class O is not a good candidate for the next merge step, because it also appears in the tails of list 2 and 3, but... = [K1, A, B] + merge([O], [O], [C, O], [C]) // ...class B qualified, and so does class C; class O still appears in the tail of list 3 = [K1, A, B, C] + merge([O], [O], [O]) // finally, class O is a valid candidate, which also exhausts all remaining lists = [K1, A, B, C, O] L(K2) := [K2] + merge(L(D), L(B), L(E), [D, B, E]) = [K2] + merge([D, O], [B, O], [E, O], [D, B, E]) // select D = [K2, D] + merge([O], [B, O], [E, O], [B, E]) // fail O, select B = [K2, D, B] + merge([O], [O], [E, O], [E]) // fail O, select E = [K2, D, B, E] + merge([O], [O], [O]) // select O = [K2, D, B, E, O] L(K3) := [K3] + merge(L(D), L(A), [D, A]) = [K3] + merge([D, O], [A, O], [D, A]) // select D = [K3, D] + merge([O], [A, O], [A]) // fail O, select A = [K3, D, A] + merge([O], [O]) // select O = [K3, D, A, O] L(Z) := [Z] + merge(L(K1), L(K2), L(K3), [K1, K2, K3]) = [Z] + merge([K1, A, B, C, O], [K2, D, B, E, O], [K3, D, A, O], [K1, K2, K3]) // select K1 = [Z, K1] + merge([A, B, C, O], [K2, D, B, E, O], [K3, D, A, O], [K2, K3]) // fail A, select K2 = [Z, K1, K2] + merge([A, B, C, O], [D, B, E, O], [K3, D, A, O], [K3]) // fail A, fail D, select K3 = [Z, K1, K2, K3] + merge([A, B, C, O], [D, B, E, O], [D, A, O]) // fail A, select D = [Z, K1, K2, K3, D] + merge([A, B, C, O], [B, E, O], [A, O]) // select A = [Z, K1, K2, K3, D, A] + merge([B, C, O], [B, E, O], [O]) // select B = [Z, K1, K2, K3, D, A, B] + merge([C, O], [E, O], [O]) // select C = [Z, K1, K2, K3, D, A, B, C] + merge([O], [E, O], [O]) // fail O, select E = [Z, K1, K2, K3, D, A, B, C, E] + merge([O], [O], [O]) // select O = [Z, K1, K2, K3, D, A, B, C, E, O] // done
Example demonstrated in Python
First, a metaclass to enable a short representation of the objects by name instead of <class '__main__.A'>:
>>> class Type(type):
... def __repr__(cls):
... return cls.__name__
>>> A = Type('A', (object,), {})
>>> A
A
Since the class definition's use of metaclass changes in Python 3, to make this example compatible with 2 and 3, we create the objects with the metaclass as we would with type.
A = Type('A', (object,), {})
B = Type('B', (object,), {})
C = Type('C', (object,), {})
D = Type('D', (object,), {})
E = Type('E', (object,), {})
K1 = Type('K1', (A, B, C), {})
K2 = Type('K2', (D, B, E), {})
K3 = Type('K3', (D, A), {})
Z = Type('Z', (K1, K2, K3), {})
Nominally equivalent Python 2 class definition would be:
class Z2(K1, K2, K3):
__metaclass__ = Type
And Python 3 would be:
class Z3(K1, K2, K3, metaclass=Type):
pass
And now:
>>> Z.mro()
[Z, K1, K2, K3, D, A, B, C, E, <type 'object'>]
>>> Z2.mro()
[Z2, K1, K2, K3, D, A, B, C, E, <type 'object'>]
References
- ↑ "A Monotonic Superclass Linearization for Dylan". OOPSLA '96 Conference Proceedings. ACM Press. 1996-06-28. pp. 69–82. doi:10.1145/236337.236343. ISBN 0-89791-788-X.
- ↑ News item on opendylan.org
- ↑ Dylan Enhancement Proposal 3: C3 superclass linearization
- ↑ Python 2.3's use of C3 MRO
- ↑ Tutorial for practical applications of C3 linearization using Python
- ↑ Perl 6's use of the C3 MRO
- ↑ Parrot uses C3 MRO
- ↑ C3 MRO available in Perl 5.10 and newer
- ↑ Perl 5 extension for C3 MRO on CPAN