Braitenberg vehicle
A Braitenberg vehicle is a concept conceived in a thought experiment by the Italian-Austrian cyberneticist Valentino Braitenberg.
The motion of the vehicle is directly controlled by some sensors (for example photo cells). Yet the resulting behaviour may appear complex or even intelligent.
Mechanism
A Braitenberg vehicle is an agent that can autonomously move around based on its sensor inputs. It has primitive sensors that measure some stimulus at a point, and wheels (each driven by its own motor) that function as actuators or effectors. In the simplest configuration, a sensor is directly connected to an effector, so that a sensed signal immediately produces a movement of the wheel.
Depending on how sensors and wheels are connected, the vehicle exhibits different behaviors (which can be goal-oriented). This means that, depending on the sensor-motor wiring, it appears to strive to achieve certain situations and to avoid others, changing course when the situation changes.[1]
The connections between sensors and actuators for the simplest vehicles (2 and 3) can be ipsilateral or contralateral, and excitatory or inhibitory, producing four combinations with different behaviours named; fear, aggression and liking, and love.
Examples
The following examples are some of Braitenberg's simplest vehicles.
Vehicle 1
A first agent has one sensor (e.g. light-detector) that directly stimulates its single wheel in an excitatory way. The vehicle can standstill or move forward. The behaviour of this vehicle can be interpreted as:
- More light produces faster movement.
- Less light produces slower movement.
- Darkness produces standstill.
This behavior can be understood as a creature that is afraid of the light and that moves fast to get away from it. Its goal is to find a dark spot to hide.
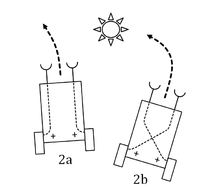
Vehicle 2a
A slightly more complex agent has two (left and right) symmetric sensors (e.g. light detectors) each stimulating a wheel on the same side of the body. This vehicle represent a model of negative animal tropotaxis. It obeys the following rule:
- More light right → right wheel turns faster → turns towards the left, away from the light.
This is more efficient as a behavior to escape from the light source, since the creature can move in different directions, and tends to orient towards the direction from which least light comes.
In another variation, the connections are negative or inhibitory: more light → slower movement. In this case, the agents move away from the dark and towards the light.
Vehicle 2b
The agent has the same two (left and right) symmetric sensors (e.g. light detectors), but each one stimulating a wheel on the other side of the body. It obeys the following rule:
- More light left → right wheel turns faster → turns towards the left, closer the light.
As a result, the robot follows the light; it moves to be closer to the light.
Behavior

In a complex environment with several sources of stimulus, Braitenberg vehicles will exhibit complex and dynamic behavior.
Depending on the connections between sensors and actuators, a Braitenberg vehicle might move close to a source, but not touch it, run away very fast, or describe circles or figures-of-eight around a point.
This behavior is undoubtedly goal-directed, flexible and adaptive, and might even appear to be intelligent, the way some minimal intelligence is attributed to a cockroach. Yet, the functioning of the agent is purely mechanical, without any information processing or other apparently cognitive processes.
Often, BEAM robotics implements these sorts of behaviors.
See also
References
- Notes
- ↑ Braitenberg, V. (1984). Vehicles: Experiments in synthetic psychology. Cambridge, MA: MIT Press.
- Lambrinos, D., Scheier, Ch. (1995). Extended braitenberg architectures. Technical Report AI Lab no. 95.10, Computer Science Department, University of Zurich.
- Headleand, Chris, Llyr Ap Cynedd, and William J. Teahan. "Berry Eaters: Learning Colour Concepts with Template Based Evolution Evaluation." ALIFE 14: The Fourteenth Conference on the Synthesis and Simulation of Living Systems. Vol. 14.
External links
- Valentino Braitenberg's homepage
- A software Braitenberg vehicle simulator
- Another Braitenberg vehicle simulator, lets you play around with different settings, vehicles and sources
- An Apple Playground on Braitenberg Vehicles, an APPLE playground in SWIFT language which implements some Braitenberg vehicles, it lets experiment in a very interactive way.