Tennis racket theorem
The tennis racket theorem is a result in classical mechanics describing movement of a rigid body with three distinct principal moments of inertia. It is also dubbed the Dzhanibekov effect, after Russian astronaut Vladimir Dzhanibekov who discovered the theorem's consequences while in space in 1985.[1] An article explaining the effect was published in 1991.[2]
The theorem describes the following effect: rotation of an object about its first and third principal axes is stable, while rotation about its second principal axis is not. This can be demonstrated with the following experiment: hold a tennis racket at its handle, with face horizontal, and try to throw it in the air so that it will perform a full rotation about the horizontal axis perpendicular to the handle, and try to catch the handle. In almost all cases, during that rotation the face will also have completed a half rotation, so that the other face is now up. By contrast, it is easy to throw the racket so that it will rotate about the handle axis (the third principal axis) without accompanying half-rotation about another axis; it is also possible to make it rotate about the vertical axis perpendicular to the handle (the first principal axis) without any accompanying half-rotation.
The experiment can be performed with any object that has three different moments of inertia, for instance with a book. The effect occurs whenever the axis of rotation differs slightly from the object's second principal axis; air resistance or gravity are not necessary.[3]
Qualitative discussion
The tennis racket theorem can be qualitatively analysed with the help of Euler's equations.
Under torque free conditions, they take the following form:
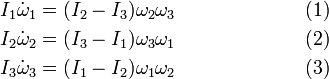
Here  denote the object's principal moments of inertia, and we assume
denote the object's principal moments of inertia, and we assume  . The angular velocities about the object's three principal axes are
. The angular velocities about the object's three principal axes are  .
.
Consider the situation when the object is rotating about axis with moment of inertia  . To determine the nature of equilibrium, assume small initial angular velocities along the other two axes. As a result, according to equation (1),
. To determine the nature of equilibrium, assume small initial angular velocities along the other two axes. As a result, according to equation (1),  is very small. Therefore the time dependence of
is very small. Therefore the time dependence of  may be neglected.
may be neglected.
Now, differentiating equation (2) and substituting  from equation (3),
from equation (3),

Note that  is being opposed and so rotation around this axis is stable for the object.
is being opposed and so rotation around this axis is stable for the object.
Similar reasoning gives that rotation around axis with moment of inertia  is also stable.
is also stable.
Now apply the same analysis to axis with moment of inertia  . This time
. This time  is very small. Therefore the time dependence of
is very small. Therefore the time dependence of  may be neglected.
may be neglected.
Now, differentiating equation (1) and substituting from equation (3),

Note that  is not opposed (and therefore will grow) and so rotation around the 2 axis is unstable. Therefore even a small disturbance along other axes causes the object to 'flip'.
is not opposed (and therefore will grow) and so rotation around the 2 axis is unstable. Therefore even a small disturbance along other axes causes the object to 'flip'.
See also
References
- ↑ Эффект Джанибекова (гайка Джанибекова), 23 July 2009 (Russian)
- ↑ Mark S. Ashbaugh, Carmen C. Chicone and Richard H. Cushman (1991). "The Twisting Tennis Racket". Journal of Dynamics and Differential Equations 3 (1): 67–85.
- ↑ Mark Levi (2014). Classical Mechanics with Calculus of Variations and Optimal Control: An Intuitive Introduction. pp. 151–152.
External links
- Dzhanibekov effect video demonstrated on the International Space Station
- Another video demonstration of the effect in space
- Slow motion video demonstrating the effect with table tennis rackets