Stokes stream function

In fluid dynamics, the Stokes stream function is used to describe the streamlines and flow velocity in a three-dimensional incompressible flow with axisymmetry. A surface with a constant value of the Stokes stream function encloses a streamtube, everywhere tangential to the flow velocity vectors. Further, the volume flux within this streamtube is constant, and all the streamlines of the flow are located on this surface. The velocity field associated with the Stokes stream function is solenoidal—it has zero divergence. This stream function is named in honor of George Gabriel Stokes.
Cylindrical coordinates
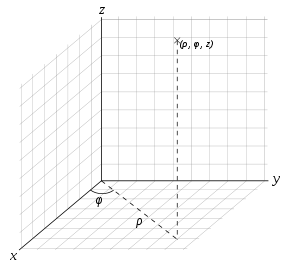
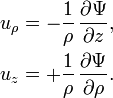
Consider a cylindrical coordinate system ( ρ , φ , z ), with the z–axis the line around which the incompressible flow is axisymmetrical, φ the azimuthal angle and ρ the distance to the z–axis. Then the flow velocity components uρ and uz can be expressed in terms of the Stokes stream function  by:[1]
by:[1]
The azimuthal velocity component uφ does not depend on the stream function. Due to the axisymmetry, all three velocity components ( uρ , uφ , uz ) only depend on ρ and z and not on the azimuth φ.
The volume flux, through the surface bounded by a constant value ψ of the Stokes stream function, is equal to 2π ψ.
Spherical coordinates
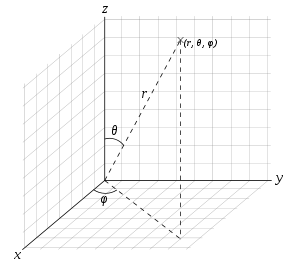
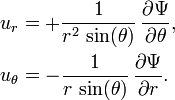
In spherical coordinates ( r , θ , φ ), r is the radial distance from the origin, θ is the zenith angle and φ is the azimuthal angle. In axisymmetric flow, with θ = 0 the rotational symmetry axis, the quantities describing the flow are again independent of the azimuth φ. The flow velocity components ur and uθ are related to the Stokes stream function through:[2]
Again, the azimuthal velocity component uφ is not a function of the Stokes stream function ψ. The volume flux through a stream tube, bounded by a surface of constant ψ, equals 2π ψ, as before.
Vorticity
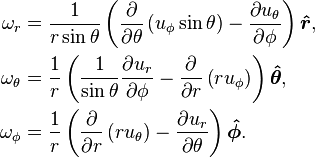
The vorticity is defined as:
 , where
, where 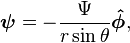
with  the unit vector in the
the unit vector in the  –direction.
–direction.
Derivation of vorticity  using a Stokes stream function
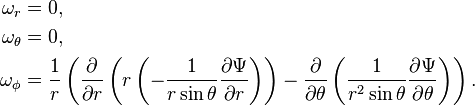
using a Stokes stream functionConsider the vorticity as defined by From the definition of the curl in spherical coordinates:
First notice that the
 and
and  components are equal to 0. Secondly substitute
components are equal to 0. Secondly substitute  and
and  into
into  The result is:
The result is:Next the following algebra is performed:

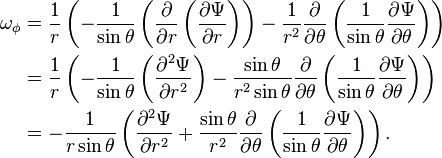
As a result, from the calculation the vorticity vector is found to be equal to:
![\boldsymbol{\omega} =
\begin{pmatrix}
0 \\[1ex]
0 \\[1ex]
\displaystyle -\frac{1}{r\sin\theta} \left(\frac{\partial^2\Psi}{\partial r^2} + \frac{\sin\theta}{r^2}{\partial \over \partial \theta}\left(\frac{1}{\sin\theta}\frac{\partial\Psi}{\partial \theta}\right)\right)
\end{pmatrix}.](../I/m/9c65314728b7ae055e2e0366d7bfb04a.png)
Comparison with cylindrical
The cylindrical and spherical coordinate systems are related through
 and
and 
Alternative definition with opposite sign
As explained in the general stream function article, definitions using an opposite sign convention – for the relationship between the Stokes stream function and flow velocity – are also in use.[3]
Zero divergence
In cylindrical coordinates, the divergence of the velocity field u becomes:[4]
as expected for an incompressible flow.
And in spherical coordinates:[5]
Streamlines as curves of constant stream function
From calculus it is known that the gradient vector  is normal to the curve
is normal to the curve  (see e.g. Level set#Level sets versus the gradient). If it is shown that everywhere
(see e.g. Level set#Level sets versus the gradient). If it is shown that everywhere  using the formula for
using the formula for  in terms of
in terms of  then this proves that level curves of are streamlines.
then this proves that level curves of are streamlines.
- Cylindrical coordinates
In cylindrical coordinates,
 .
.
and

So that

- Spherical coordinates
And in spherical coordinates
and

So that

Notes
References
- Batchelor, G.K. (1967). An Introduction to Fluid Dynamics. Cambridge University Press. ISBN 0-521-66396-2.
- Lamb, H. (1994). Hydrodynamics (6th ed.). Cambridge University Press. ISBN 978-0-521-45868-9. Originally published in 1879, the 6th extended edition appeared first in 1932.
- Stokes, G.G. (1842). "On the steady motion of incompressible fluids". Transactions of the Cambridge Philosophical Society 7: 439–453. Bibcode:1848TCaPS...7..439S.
Reprinted in: Stokes, G.G. (1880). Mathematical and Physical Papers, Volume I. Cambridge University Press. pp. 1–16.