Steiner tree problem

The Steiner tree problem, or the minimum Steiner tree problem, named after Jakob Steiner, is a problem in combinatorial optimization, which may be formulated in a number of settings, with the common part being that it is required to find the shortest interconnect for a given set of objects.
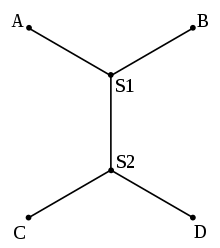
The Steiner tree problem is superficially similar to the minimum spanning tree problem: given a set V of points (vertices), interconnect them by a network (graph) of shortest length, where the length is the sum of the lengths of all edges. The difference between the Steiner tree problem and the minimum spanning tree problem is that, in the Steiner tree problem, extra intermediate vertices and edges may be added to the graph in order to reduce the length of the spanning tree. These new vertices introduced to decrease the total length of connection are known as Steiner points or Steiner vertices. It has been proved that the resulting connection is a tree, known as the Steiner tree. There may be several Steiner trees for a given set of initial vertices.
The Steiner tree problem has applications in circuit layout or network design. Most versions of the Steiner tree problem are NP-complete. In fact, one of these was among Karp's original 21 NP-complete problems. Some restricted cases can be solved in polynomial time. In practice, heuristics are used.
Euclidean Steiner tree
The original problem was stated in the form that has become known as the Euclidean Steiner tree problem or geometric Steiner tree problem: Given N points in the plane, the goal is to connect them by lines of minimum total length in such a way that any two points may be interconnected by line segments either directly or via other points and line segments.
It may be shown that the connecting line segments do not intersect each other except at the endpoints and form a tree, hence the name of the problem.
For the Euclidean Steiner problem, points added to the graph (Steiner points) must have a degree of three, and the three edges incident to such a point must form three 120 degree angles (see Fermat point). It follows that the maximum number of Steiner points that a Steiner tree can have is N − 2, where N is the initial number of given points.
For N = 3 there are two possible cases: if the triangle formed by the given points has all angles which are less than 120 degrees, the solution is given by a Steiner point located at the Fermat point; otherwise the solution is given by the two sides of the triangle which meet on the angle with 120 or more degrees.
For general N, the Euclidean Steiner tree problem is NP-hard, and hence it is not known whether an optimal solution can be found by using a polynomial-time algorithm. However, there is a polynomial-time approximation scheme (PTAS) for Euclidean Steiner trees, i.e., a near-optimal solution can be found in polynomial time.[1] It is not known whether the Euclidean Steiner tree problem is NP-complete, since membership to the complexity class NP is not known.
Rectilinear Steiner tree
The minimum rectilinear Steiner tree problem (MRST) is a variant of the geometric Steiner tree problem in the plane, in which the Euclidean distance is replaced with the rectilinear distance. The problem arises in the physical design of electronic design automation. In VLSI circuits, wire routing is carried out by wires running only in vertical and horizontal directions, due to high computational complexity of the task[2] and manufacturing constraints.
Generalization of minimum Steiner tree
Steiner trees have also been studied in the context of weighted graphs. In the general Steiner tree problem (Steiner tree in graphs), we are given an edge-weighted graph G = (V, E, w) and a subset S ⊆ V of required vertices. A Steiner tree is a tree in G that spans all vertices of S. There are two versions of the problem: in the optimization problem associated with Steiner trees, the task is to find a minimum-weight Steiner tree; in the decision problem, we are given a value k and the task is to determine whether a Steiner tree of total weight at most k exists. The decision problem was one of Karp's 21 NP-complete problems; hence the optimization problem is NP-hard.
A special case of this problem is when G is a complete graph, each vertex v ∈ V corresponds to a point in a metric space, and the edge weights w(e) for each e ∈ E correspond to distances in the space. Put otherwise, the edge weights satisfy the triangle inequality. This variant is known as the metric Steiner tree problem. Given an instance of the (non-metric) Steiner tree problem, we can transform it in polynomial time into an equivalent instance of the metric Steiner tree problem; the transformation preserves the approximation factor.[3]
While the Euclidean version admits a PTAS, it is known that the metric Steiner tree problem is APX-complete, i.e., it is believed that arbitrarily good approximation ratios cannot in general be achieved in polynomial time. There is a polynomial-time algorithm that finds a factor-(ln(4)+ε)=factor-1.386... approximation of a minimum Steiner tree[4] while approximating within a factor 96/95=1.0105... is NP-hard.[5] For the restricted case of Steiner Tree problem with distances 1 and 2, a 1.25-approximation algorithm is known.[6]
In a special case of the graph problem, the Steiner tree problem for quasi-bipartite graphs, S is required to include at least one endpoint of every edge in G.
The Steiner tree problem has also been investigated in higher dimensions and on various surfaces. Algorithms to find the Steiner minimal tree have been found on the sphere, torus, projective plane, wide and narrow cones, and others.[7]
Another generalizations of the Steiner tree problem are the k-edge-connected Steiner network problem and the k-vertex-connected Steiner network problem, where the goal is to find a k-edge-connected graph or a k-vertex-connected graph rather than any connected graph.
Recently, the Steiner problem has been stated in the general setting of metric spaces and for possibly infinitely many points (see Paolini, E.; Stepanov, E. (2012). "Existence and regularity results for the Steiner problem". Calc. Var. Partial Diff. Equations. doi:10.1007/s00526-012-0505-4.).
Approximating the Steiner Tree
In the general graph Steiner tree problem, a minimum-cost terminal spanning tree is a minimum spanning tree (MST) on the graph induced by the set of terminals  on the metric closure
on the metric closure  of
of  . This tree is a feasible but not necessarily optimal solution to the Steiner tree problem. This metric closure can be substituted for without loss of generality, and is described by placing an edge in between every two vertices with weight equal to the shortest path between those vertices in the original graph. There are
. This tree is a feasible but not necessarily optimal solution to the Steiner tree problem. This metric closure can be substituted for without loss of generality, and is described by placing an edge in between every two vertices with weight equal to the shortest path between those vertices in the original graph. There are  such vertices, so this closure can be produced in polynomial time by applying Djikstra's algorithm on every pair of vertices. It is trivial to prove that the optimal solution on
such vertices, so this closure can be produced in polynomial time by applying Djikstra's algorithm on every pair of vertices. It is trivial to prove that the optimal solution on  ,
,  is of equal cost to the that of the optimal solution
is of equal cost to the that of the optimal solution  on
on
The minimum cost terminal spanning tree is the spanning tree on the (fully connected) subgraph of the metric closure containing only the terminals as vertices and the edges between them. This tree is well-known to be a 2-approximation for the optimal minimum Steiner tree. More specifically, it is a  approximation where
approximation where  is the number of terminals. This proof can be worked out by considering a traveling salesman tour on the optimal Steiner tree.
is the number of terminals. This proof can be worked out by considering a traveling salesman tour on the optimal Steiner tree.
A series of papers, culminating with Robins and Zelikovsky's famous algorithm in 2000 improved this ratio to 1.55 by iteratively improving upon the minimum cost terminal spanning tree. More recently, however, Jaroslaw Byrka et al.[8] proved an  approximation using a linear programming relaxation and a technique called iterative, randomized rounding.
approximation using a linear programming relaxation and a technique called iterative, randomized rounding.
Steiner ratio
The Steiner ratio is the supremum of the ratio of the total length of the minimum Steiner tree to the minimum spanning tree for a set of points in the Euclidean plane.[9]
In the Euclidean Steiner tree problem, the Steiner ratio is conjectured to be  . Despite earlier claims of a proof,[10] the conjecture is still open.[11]
In the Rectilinear Steiner tree problem, the Steiner ratio is
. Despite earlier claims of a proof,[10] the conjecture is still open.[11]
In the Rectilinear Steiner tree problem, the Steiner ratio is  .
.
See also
Notes
- ↑ Crescenzi, Pierluigi; Kann, Viggo; Halldórsson, Magnús; Karpinski, Marek; Woeginger, Gerhard (2000). "A Compendium of NP Optimization Problems"
|chapter=ignored (help). - ↑ Naveed Sherwani, "Algorithms for VLSI Physical Design Automation"
- ↑ Vazirani 2003, pp. 27–28.
- ↑ Byrka, J.; Grandoni, F.; Rothvoß, T.; Sanita, L. (2010). "An Improved LP-based Approximation for Steiner Tree". Proceedings of the 42nd ACM symposium on Theory of computing: 583–592. doi:10.1145/1806689.1806769.
- ↑ Chlebík, Miroslav; Chlebíková, Janka (2008). "The Steiner tree problem on graphs: Inapproximability results". Theoretical Computer Science. doi:10.1016/j.tcs.2008.06.046.
- ↑ Berman, Piotr; Karpinski, Marek; Zelikovsky, Alexander (2009). "1.25-Approximation Algorithm for Steiner Tree Problem with Distances 1 and 2". Lecture Notes in Computer Science 5664: 86–97. doi:10.1007/978-3-642-03367-4_8.
- ↑ Dingzhu Du, Frank Hwang (1995). Computing in Euclidean geometry. Lecture Notes of Computing 4 (2nd ed.). River Edge, NJ: World Scientific Publishing Co. ISBN 981-02-1876-1., p. 361
- ↑ http://dl.acm.org/citation.cfm?id=1806769
- ↑ Ganley, Joseph L. (2004). "Steiner ratio". In Black, Paul E. Dictionary of Algorithms and Data Structures. U.S. National Institute of Standards and Technology. Retrieved 2012-05-24.
- ↑ The New York Times, Oct 30, 1990, reported that a proof had been found, and that Ronald Graham, who had offered $500 for a proof, was about to mail a check to the authors.
- ↑ Ivanov, A. O.; A. A. Tuzhilin (2012). "The Steiner Ratio Gilbert–Pollak Conjecture Is Still Open: Clarification Statement". Algorithmica 62 (1-2): 630–632. doi:10.1007/s00453-011-9508-3. Retrieved 1 March 2012.
References
- Garey, Michael R.; Johnson, David S. (1979), Computers and Intractability: A Guide to the Theory of NP-Completeness, W. H. Freeman, ISBN 0-7167-1045-5, p. 208–209, problems ND12 and ND13.
- F. K. Hwang, D. S. Richards, P. Winter (1992). The Steiner Tree Problem. Annals of Discrete Mathematics 53. North-Holland: Elsevier. ISBN 0-444-89098-X.
- A. O. Ivanov, A. A. Tuzhilin (1994). Minimal Networks: The Steiner Problem and Its Generalizations. N.W., Boca Raton, Florida: CRC Press. ISBN 978-0-8493-8642-8.
- A. O. Ivanov, A. A. Tuzhilin (2000). Branching solutions to one-dimensional variational problems. Singapore-New Jersey-London-Hong Kong: World Scientific. ISBN 978-981-02-4060-8.
- A. O. Ivanov, A. A. Tuzhilin (2003). Extreme Networks Theory (in Russian). Moscow-Izhevsk: Institute of Computer Investigations. ISBN 5-93972-292-X.
- Korte, Bernhard; Vygen, Jens (2006). "Section 20.1". Combinatorial Optimization: Theory and Algorithms (3rd ed.). Springer. ISBN 3-540-25684-9.
- Vazirani, Vijay V. (2003). Approximation Algorithms. Berlin: Springer. ISBN 3-540-65367-8.
- Berman, Piotr; Karpinski, Marek; Zelikovsky, Alexander (2009). "1.25-Approximation Algorithm for Steiner Tree Problem with Distances 1 and 2". Lecture Notes in Computer Science 5664: 86–97. doi:10.1007/978-3-642-03367-4_8.
- Wu, Bang Ye; Chao, Kun-Mao (2004). "Chapter 7". Spanning Trees and Optimization Problems. Chapman & Hall/CRC. ISBN 1-58488-436-3.
- Bern, Marshall W.; Graham, Ronald L. (1989). "The Shortest-Network Problem". Scientific American 260 (1): 84–89. doi:10.1038/scientificamerican0189-84.
- Dietmar Cieslik (1998). Steiner Minimal Trees. p. 319. ISBN 0-7923-4983-0.
External links
| Wikimedia Commons has media related to Steiner tree problem. |
- Hazewinkel, M. (2001), "Steiner tree problem", in Hazewinkel, Michiel, Encyclopedia of Mathematics, Springer, ISBN 978-1-55608-010-4
- M. Hauptmann, M. Karpinski (2013): A Compendium on Steiner Tree Problems
- GeoSteiner (Steiner tree solver, Source available, for non commercial use)
- https://archive.org/details/RonaldLG1988 (Movie: Ronald L Graham: The Shortest Network Problem (1988)
- Fortran subroutine for finding the Steiner vertex of a triangle (i.e., Fermat point), its distances from the triangle vertices, and the relative vertex weights.
- Phylomurka (Solver for the Steiner tree problem in networks)
- https://www.youtube.com/watch?v=PI6rAOWu-Og (Movie: solving the Steiner tree problem with water and soap)