Richmond surface

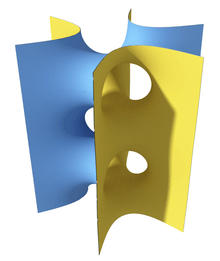
Richmond surface for m=2.
In differential geometry, a Richmond surface is a minimal surface first described by Herbert William Richmond in 1904. [1] It is a family of surfaces with one planar end and one Enneper surface-like self-intersecting end.
It has Weierstrass–Enneper parameterization  . This allows a parametrization based on a complex parameter as
. This allows a parametrization based on a complex parameter as
![\begin{align}
X(z) &= \Re[(-1/2z) - z^{2m+1}/(4m+2)]\\
Y(z) &= \Re[(-i/2z) + i z^{2m+1}/(4m+2)]\\
Z(z) &= \Re[z^n / n]
\end{align}](../I/m/c73888e95f28f488ef95f2f7ae4800d4.png)
The associate family of the surface is just the surface rotated around the z-axis.
Taking m = 2 a real parametric expression becomes:[2]
References
| ||||||||