Motion estimation
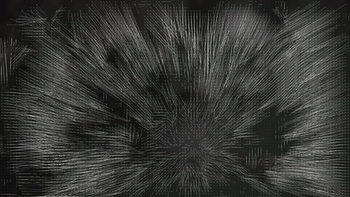
 -plane of the image, combined with a lateral movement to the lower-right. This is a visualization of the motion estimation performed in order to compress an MPEG movie.
-plane of the image, combined with a lateral movement to the lower-right. This is a visualization of the motion estimation performed in order to compress an MPEG movie.Motion estimation is the process of determining motion vectors that describe the transformation from one 2D image to another; usually from adjacent frames in a video sequence. It is an ill-posed problem as the motion is in three dimensions but the images are a projection of the 3D scene onto a 2D plane. The motion vectors may relate to the whole image (global motion estimation) or specific parts, such as rectangular blocks, arbitrary shaped patches or even per pixel. The motion vectors may be represented by a translational model or many other models that can approximate the motion of a real video camera, such as rotation and translation in all three dimensions and zoom.
More often than not, the term motion estimation and the term optical flow are used interchangeably.
Algorithms
The methods for finding motion vectors can be categorised into pixel based methods ("direct") and feature based methods ("indirect"). A famous debate resulted in two papers from the opposing factions being produced to try to establish a conclusion.[1][2]
Direct Methods
- Block-matching algorithm
- Phase correlation and frequency domain methods
- Pixel recursive algorithms
- Optical flow
Indirect Methods
Indirect methods use features, such as corner detection, and match corresponding features between frames, usually with a statistical function applied over a local or global area. The purpose of the statistical function is to remove matches that do not correspond to the actual motion.
Statistical functions that have been successfully used include RANSAC.
Applications
Video Coding
Applying the motion vectors to an image to synthesize the transformation to the next image is called motion compensation. As a way of exploiting temporal redundancy, motion estimation and compensation are key parts of video compression. Almost all video coding standards use block-based motion estimation and compensation such as the MPEG series including the most recent HEVC.