List of matrices
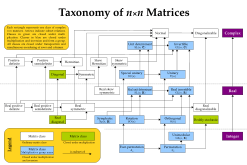
This page lists some important classes of matrices used in mathematics, science and engineering. A matrix (plural matrices, or less commonly matrixes) is a rectangular array of numbers called entries. Matrices have a long history of both study and application, leading to diverse ways of classifying matrices. A first group is matrices satisfying concrete conditions of the entries, including constant matrices. An important example is the identity matrix given by
Further ways of classifying matrices are according to their eigenvalues or by imposing conditions on the product of the matrix with other matrices. Finally, many domains, both in mathematics and other sciences including physics and chemistry have particular matrices that are applied chiefly in these areas.
Matrices with explicitly constrained entries
The following lists matrices whose entries are subject to certain conditions. Many of them apply to square matrices only, that is matrices with the same number of columns and rows. The main diagonal of a square matrix is the diagonal joining the upper left corner and the lower right one or equivalently the entries ai,i. The other diagonal is called anti-diagonal (or counter-diagonal).
| Name | Explanation | Notes, References |
|---|---|---|
| (0,1)-matrix | A matrix with all elements either 0 or 1. | Synonym for binary matrix, Boolean matrix and logical matrix. |
| Alternant matrix | A matrix in which successive columns have a particular function applied to their entries. | |
| Anti-diagonal matrix | A square matrix with all entries off the anti-diagonal equal to zero. | |
| Anti-Hermitian matrix | Synonym for skew-Hermitian matrix. | |
| Anti-symmetric matrix | Synonym for skew-symmetric matrix. | |
| Arrowhead matrix | A square matrix containing zeros in all entries except for the first row, first column, and main diagonal. | |
| Band matrix | A square matrix whose non-zero entries are confined to a diagonal band. | |
| Bidiagonal matrix | A matrix with elements only on the main diagonal and either the superdiagonal or subdiagonal. | Sometimes defined differently, see article. |
| Binary matrix | A matrix whose entries are all either 0 or 1. | Synonym for (0,1)-matrix, Boolean matrix or logical matrix.[1] |
| Bisymmetric matrix | A square matrix that is symmetric with respect to its main diagonal and its main cross-diagonal. | |
| Block-diagonal matrix | A block matrix with entries only on the diagonal. | |
| Block matrix | A matrix partitioned in sub-matrices called blocks. | |
| Block tridiagonal matrix | A block matrix which is essentially a tridiagonal matrix but with submatrices in place of scalar elements | |
| Boolean matrix | A matrix whose entries are all either 0 or 1. | Synonym for (0,1)-matrix, binary matrix or logical matrix. |
| Cauchy matrix | A matrix whose elements are of the form 1/(xi + yj) for (xi), (yj) injective sequences (i.e., taking every value only once). | |
| Centrosymmetric matrix | A matrix symmetric about its center; i.e., aij = an−i+1,n−j+1 | |
| Conference matrix | A square matrix with zero diagonal and +1 and −1 off the diagonal, such that CTC is a multiple of the identity matrix. | |
| Complex Hadamard matrix | A matrix with all rows and columns mutually orthogonal, whose entries are unimodular. | |
| Copositive matrix | A square matrix A with real coefficients, such that  is nonnegative for every nonnegative vector x is nonnegative for every nonnegative vector x | |
| Diagonally dominant matrix | |aii| > Σj≠i |aij|. | |
| Diagonal matrix | A square matrix with all entries outside the main diagonal equal to zero. | |
| Discrete Fourier Transform Matrix | Multiplying by a vector gives the DFT of the vector as result. | |
| Elementary matrix | A square matrix derived by applying an elementary row operation to the identity matrix. | |
| Equivalent matrix | A matrix that can be derived from another matrix through a sequence of elementary row or column operations. | |
| Frobenius matrix | A square matrix in the form of an identity matrix but with arbitrary entries in one column below the main diagonal. | |
| Generalized permutation matrix | A square matrix with precisely one nonzero element in each row and column. | |
| Hadamard matrix | A square matrix with entries +1, −1 whose rows are mutually orthogonal. | |
| Hankel matrix | A matrix with constant skew-diagonals; also an upside down Toeplitz matrix. | A square Hankel matrix is symmetric. |
| Hermitian matrix | A square matrix which is equal to its conjugate transpose, A = A*. | |
| Hessenberg matrix | An "almost" triangular matrix, for example, an upper Hessenberg matrix has zero entries below the first subdiagonal. | |
| Hollow matrix | A square matrix whose main diagonal comprises only zero elements. | |
| Integer matrix | A matrix whose entries are all integers. | |
| Logical matrix | A matrix with all entries either 0 or 1. | Synonym for (0,1)-matrix, binary matrix or Boolean matrix. Can be used to represent a k-adic relation. |
| Markov matrix | A matrix of non-negative real numbers, such that the entries in each row sum to 1. | |
| Metzler matrix | A matrix whose off-diagonal entries are non-negative. | |
| Monomial matrix | A square matrix with exactly one non-zero entry in each row and column. | Synonym for generalized permutation matrix. |
| Moore matrix | A row consists of a, aq, aq², etc., and each row uses a different variable. | |
| Nonnegative matrix | A matrix with all nonnegative entries. | |
| Partitioned matrix | A matrix partitioned into sub-matrices, or equivalently, a matrix whose entries are themselves matrices rather than scalars | Synonym for block matrix |
| Parisi matrix | A block-hierarchical matrix. It consist of growing blocks placed along the diagonal, each block is itself a Parisi matrix of a smaller size. | In theory of spin-glasses is also known as a replica matrix. |
| Pentadiagonal matrix | A matrix with the only nonzero entries on the main diagonal and the two diagonals just above and below the main one. | |
| Permutation matrix | A matrix representation of a permutation, a square matrix with exactly one 1 in each row and column, and all other elements 0. | |
| Persymmetric matrix | A matrix that is symmetric about its northeast-southwest diagonal, i.e., aij = an−j+1,n−i+1 | |
| Polynomial matrix | A matrix whose entries are polynomials. | |
| Positive matrix | A matrix with all positive entries. | |
| Quaternionic matrix | A matrix whose entries are quaternions. | |
| Sign matrix | A matrix whose entries are either +1, 0, or −1. | |
| Signature matrix | A diagonal matrix where the diagonal elements are either +1 or −1. | |
| Skew-Hermitian matrix | A square matrix which is equal to the negative of its conjugate transpose, A* = −A. | |
| Skew-symmetric matrix | A matrix which is equal to the negative of its transpose, AT = −A. | |
| Skyline matrix | A rearrangement of the entries of a banded matrix which requires less space. | |
| Sparse matrix | A matrix with relatively few non-zero elements. | Sparse matrix algorithms can tackle huge sparse matrices that are utterly impractical for dense matrix algorithms. |
| Sylvester matrix | A square matrix whose entries come from coefficients of two polynomials. | The Sylvester matrix is nonsingular if and only if the two polynomials are coprime to each other. |
| Symmetric matrix | A square matrix which is equal to its transpose, A = AT (ai,j = aj,i). | |
| Toeplitz matrix | A matrix with constant diagonals. | |
| Triangular matrix | A matrix with all entries above the main diagonal equal to zero (lower triangular) or with all entries below the main diagonal equal to zero (upper triangular). | |
| Tridiagonal matrix | A matrix with the only nonzero entries on the main diagonal and the diagonals just above and below the main one. | |
| Unitary matrix | A square matrix whose inverse is equal to its conjugate transpose, A−1 = A*. | |
| Vandermonde matrix | A row consists of 1, a, a², a³, etc., and each row uses a different variable. | |
| Walsh matrix | A square matrix, with dimensions a power of 2, the entries of which are +1 or -1. | |
| Z-matrix | A matrix with all off-diagonal entries less than zero. |
Constant matrices
The list below comprises matrices whose elements are constant for any given dimension (size) of matrix. The matrix entries will be denoted aij. The table below uses the Kronecker delta δij for two integers i and j which is 1 if i = j and 0 else.
| Name | Explanation | Symbolic description of the entries | Notes |
|---|---|---|---|
| Exchange matrix | A binary matrix with ones on the anti-diagonal, and zeroes everywhere else. | aij = δn + 1 − i,j | A permutation matrix. |
| Hilbert matrix | aij = (i + j − 1)−1. | A Hankel matrix. | |
| Identity matrix | A square diagonal matrix, with all entries on the main diagonal equal to 1, and the rest 0 | aij = δij | |
| Lehmer matrix | aij = min(i,j) ÷ max(i,j). | A positive symmetric matrix. | |
| Matrix of ones | A matrix with all entries equal to one | aij = 1. | |
| Pascal matrix | A matrix containing the entries of Pascal's triangle. | ||
| Pauli matrices | A set of three 2 × 2 complex Hermitian and unitary matrices. When combined with the I2 identity matrix, they form an orthogonal basis for the 2 × 2 complex Hermitian matrices. | ||
| Redheffer matrix | aij are 1 if i divides j or if j = 1; otherwise, aij = 0. | A (0, 1)-matrix. | |
| Shift matrix | A matrix with ones on the superdiagonal or subdiagonal and zeroes elsewhere. | aij = δi+1,j or aij = δi−1,j | Multiplication by it shifts matrix elements by one position. |
| Zero matrix | A matrix with all entries equal to zero. | aij = 0. |
Matrices with conditions on eigenvalues or eigenvectors
| Name | Explanation | Notes |
|---|---|---|
| Companion matrix | A matrix whose eigenvalues are equal to the roots of the polynomial. | |
| Convergent matrix | A square matrix whose successive powers approach the zero matrix. | Its eigenvalues have magnitude less than one. |
| Defective matrix | A square matrix that does not have a complete basis of eigenvectors, and is thus not diagonalisable. | |
| Diagonalizable matrix | A square matrix similar to a diagonal matrix. | It has an eigenbasis, that is, a complete set of linearly independent eigenvectors. |
| Hurwitz matrix | A matrix whose eigenvalues have strictly negative real part. A stable system of differential equations may be represented by a Hurwitz matrix. | |
| Positive-definite matrix | A Hermitian matrix with every eigenvalue positive. | |
| Stability matrix | Synonym for Hurwitz matrix. | |
| Stieltjes matrix | A real symmetric positive definite matrix with nonpositive off-diagonal entries. | Special case of an M-matrix. |
Matrices satisfying conditions on products or inverses
A number of matrix-related notions is about properties of products or inverses of the given matrix. The matrix product of a m-by-n matrix A and a n-by-k matrix B is the m-by-k matrix C given by
This matrix product is denoted AB. Unlike the product of numbers, matrix products are not commutative, that is to say AB need not be equal to BA. A number of notions are concerned with the failure of this commutativity. An inverse of square matrix A is a matrix B (necessarily of the same dimension as A) such that AB = I. Equivalently, BA = I. An inverse need not exist. If it exists, B is uniquely determined, and is also called the inverse of A, denoted A−1.
| Name | Explanation | Notes |
|---|---|---|
| Congruent matrix | Two matrices A and B are congruent if there exists an invertible matrix P such that PT A P = B. | Compare with similar matrices. |
| Idempotent matrix or Projection Matrix | A matrix that has the property A² = AA = A. | The name projection matrix inspires from the observation of projection of a point multiple times onto a subspace(plane or a line) giving the same result as one projection. |
| Invertible matrix | A square matrix having a multiplicative inverse, that is, a matrix B such that AB = BA = I. | Invertible matrices form the general linear group. |
| Involutory matrix | A square matrix which is its own inverse, i.e., AA = I. | Signature matrices, Householder Matrices (Also known as 'reflection matrices' to reflect a point about a plane or line) have this property. |
| Nilpotent matrix | A square matrix satisfying Aq = 0 for some positive integer q. | Equivalently, the only eigenvalue of A is 0. |
| Normal matrix | A square matrix that commutes with its conjugate transpose: AA∗ = A∗A | They are the matrices to which the spectral theorem applies. |
| Orthogonal matrix | A matrix whose inverse is equal to its transpose, A−1 = AT. | They form the orthogonal group. |
| Orthonormal matrix | A matrix whose columns are orthonormal vectors. | |
| Singular matrix | A square matrix that is not invertible. | |
| Unimodular matrix | An invertible matrix with entries in the integers (integer matrix) | Necessarily the determinant is +1 or −1. |
| Unipotent matrix | A square matrix with all eigenvalues equal to 1. | Equivalently, A − I is nilpotent. See also unipotent group. |
| Totally unimodular matrix | A matrix for which every non-singular square submatrix is unimodular. This has some implications in the linear programming relaxation of an integer program. | |
| Weighing matrix | A square matrix the entries of which are in {0, 1, −1}, such that AAT = wI for some positive integer w. |
Matrices with specific applications
| Name | Explanation | Used in | Notes |
|---|---|---|---|
| Adjugate matrix | The matrix containing minors of a given square matrix. | Calculating inverse matrices via Laplace's formula. | |
| Alternating sign matrix | A square matrix of with entries 0, 1 and −1 such that the sum of each row and column is 1 and the nonzero entries in each row and column alternate in sign. | Dodgson condensation to calculate determinants | |
| Augmented matrix | A matrix whose rows are concatenations of the rows of two smaller matrices. | Calculating inverse matrices. | |
| Bézout matrix | A square matrix which may be used as a tool for the efficient location of polynomial zeros | Control theory, Stable polynomials | |
| Carleman matrix | A matrix that converts composition of functions to multiplication of matrices. | ||
| Cartan matrix | A matrix associated with a finite-dimensional associative algebra, or a semisimple Lie algebra (the two meanings are distinct). | ||
| Circulant matrix | A matrix where each row is a circular shift of its predecessor. | System of linear equations, discrete Fourier transform | |
| Cofactor matrix | A containing the cofactors, i.e., signed minors, of a given matrix. | ||
| Commutation matrix | A matrix used for transforming the vectorized form of a matrix into the vectorized form of its transpose. | ||
| Coxeter matrix | A matrix related to Coxeter groups, which describe symmetries in a structure or system. | ||
| Distance matrix | A square matrix containing the distances, taken pairwise, of a set of points. | Computer vision, network analysis. | See also Euclidean distance matrix. |
| Duplication matrix | A linear transformation matrix used for transforming half-vectorizations of matrices into vectorizations. | ||
| Elimination matrix | A linear transformation matrix used for transforming vectorizations of matrices into half-vectorizations. | ||
| Euclidean distance matrix | A matrix that describes the pairwise distances between points in Euclidean space. | See also distance matrix. | |
| Fundamental matrix (linear differential equation) | A matrix containing the fundamental solutions of a linear ordinary differential equation. | ||
| Generator matrix | A matrix whose rows generate all elements of a linear code. | Coding theory | |
| Gramian matrix | A matrix containing the pairwise angles of given vectors in an inner product space. | Test linear independence of vectors, including ones in function spaces. | They are real symmetric. |
| Hessian matrix | A square matrix of second partial derivatives of a scalar-valued function. | Detecting local minima and maxima of scalar-valued functions in several variables; Blob detection (computer vision) | |
| Householder matrix | A transformation matrix widely used in matrix algorithms. | QR decomposition. | |
| Jacobian matrix | A matrix of first-order partial derivatives of a vector-valued function. | Implicit function theorem; Smooth morphisms (algebraic geometry). | |
| Payoff matrix | A matrix in game theory and economics, that represents the payoffs in a normal form game where players move simultaneously | ||
| Pick matrix | A matrix that occurs in the study of analytical interpolation problems. | ||
| Random matrix | A matrix whose entries consist of random numbers from some specified random distribution. | ||
| Rotation matrix | A matrix representing a rotational geometric transformation. | Special orthogonal group, Euler angles | |
| Seifert matrix | A matrix in knot theory, primarily for the algebraic analysis of topological properties of knots and links. | Alexander polynomial | |
| Shear matrix | An elementary matrix whose corresponding geometric transformation is a shear transformation. | ||
| Similarity matrix | A matrix of scores which express the similarity between two data points. | Sequence alignment | |
| Symplectic matrix | A square matrix preserving a standard skew-symmetric form. | Symplectic group, symplectic manifold. | |
| Totally positive matrix | A matrix with determinants of all its square submatrices positive. | Generating the reference points of Bézier curve in computer graphics. | |
| Transformation matrix | A matrix representing a linear transformation, often from one co-ordinate space to another to facilitate a geometric transform or projection. | ||
| Wedderburn matrix | A matrix of the form  , used for rank-reduction & biconjugate decompositions , used for rank-reduction & biconjugate decompositions | Analysis of matrix decompositions |
- Derogatory matrix — a square n×n matrix whose minimal polynomial is of order less than n.
- Moment matrix — a symmetric matrix whose elements are the products of common row/column index dependent monomials.
- X-Y-Z matrix — a generalisation of the (rectangular) matrix to a cuboidal form (a 3-dimensional array of entries).
Matrices used in statistics
The following matrices find their main application in statistics and probability theory.
- Bernoulli matrix — a square matrix with entries +1, −1, with equal probability of each.
- Centering matrix — a matrix which, when multiplied with a vector, has the same effect as subtracting the mean of the components of the vector from every component.
- Correlation matrix — a symmetric n×n matrix, formed by the pairwise correlation coefficients of several random variables.
- Covariance matrix — a symmetric n×n matrix, formed by the pairwise covariances of several random variables. Sometimes called a dispersion matrix.
- Dispersion matrix — another name for a covariance matrix.
- Doubly stochastic matrix — a non-negative matrix such that each row and each column sums to 1 (thus the matrix is both left stochastic and right stochastic)
- Fisher information matrix — a matrix representing the variance of the partial derivative, with respect to a parameter, of the log of the likelihood function of a random variable.
- Hat matrix - a square matrix used in statistics to relate fitted values to observed values.
- Precision matrix — a symmetric n×n matrix, formed by inverting the covariance matrix. Also called the information matrix.
- Stochastic matrix — a non-negative matrix describing a stochastic process. The sum of entries of any row is one.
- Transition matrix — a matrix representing the probabilities of conditions changing from one state to another in a Markov chain
Matrices used in graph theory
The following matrices find their main application in graph and network theory.
- Adjacency matrix — a square matrix representing a graph, with aij non-zero if vertex i and vertex j are adjacent.
- Biadjacency matrix — a special class of adjacency matrix that describes adjacency in bipartite graphs.
- Degree matrix — a diagonal matrix defining the degree of each vertex in a graph.
- Edmonds matrix — a square matrix of a bipartite graph.
- Incidence matrix — a matrix representing a relationship between two classes of objects (usually vertices and edges in the context of graph theory).
- Laplacian matrix — a matrix equal to the degree matrix minus the adjacency matrix for a graph, used to find the number of spanning trees in the graph.
- Seidel adjacency matrix — a matrix similar to the usual adjacency matrix but with −1 for adjacency; +1 for nonadjacency; 0 on the diagonal.
- Skew-adjacency matrix — an adjacency matrix in which each non-zero aij is 1 or −1, accordingly as the direction i → j matches or opposes that of an initially specified orientation.
- Tutte matrix — a generalisation of the Edmonds matrix for a balanced bipartite graph.
Matrices used in science and engineering
- Cabibbo-Kobayashi-Maskawa matrix — a unitary matrix used in particle physics to describe the strength of flavour-changing weak decays.
- Density matrix — a matrix describing the statistical state of a quantum system. Hermitian, non-negative and with trace 1.
- Fundamental matrix (computer vision) — a 3 × 3 matrix in computer vision that relates corresponding points in stereo images.
- Fuzzy associative matrix — a matrix in artificial intelligence, used in machine learning processes.
- Gamma matrices — 4 × 4 matrices in quantum field theory.
- Gell-Mann matrices — a generalisation of the Pauli matrices; these matrices are one notable representation of the infinitesimal generators of the special unitary group SU(3).
- Hamiltonian matrix — a matrix used in a variety of fields, including quantum mechanics and linear-quadratic regulator (LQR) systems.
- Irregular matrix — a matrix used in computer science which has a varying number of elements in each row.
- Overlap matrix — a type of Gramian matrix, used in quantum chemistry to describe the inter-relationship of a set of basis vectors of a quantum system.
- S matrix — a matrix in quantum mechanics that connects asymptotic (infinite past and future) particle states.
- State transition matrix — Exponent of state matrix in control systems.
- Substitution matrix — a matrix from bioinformatics, which describes mutation rates of amino acid or DNA sequences.
- Z-matrix — a matrix in chemistry, representing a molecule in terms of its relative atomic geometry.
Other matrix-related terms and definitions
- Jordan canonical form — an 'almost' diagonalised matrix, where the only non-zero elements appear on the lead and super-diagonals.
- Linear independence — two or more vectors are linearly independent if there is no way to construct one from linear combinations of the others.
- Matrix exponential — defined by the exponential series.
- Matrix representation of conic sections
- Pseudoinverse — a generalization of the inverse matrix.
- Quaternionic matrix - matrix using quaternions as numbers
- Row echelon form — a matrix in this form is the result of applying the forward elimination procedure to a matrix (as used in Gaussian elimination).
- Wronskian — the determinant of a matrix of functions and their derivatives such that row n is the (n-1)th derivative of row one.
See also
Notes
References
- Hogben, Leslie (2006), Handbook of Linear Algebra (Discrete Mathematics and Its Applications), Boca Raton: Chapman & Hall/CRC, ISBN 978-1-58488-510-8