List of area moments of inertia
The following is a list of area moments of inertia. The area moment of inertia or second moment of area has a unit of dimension length4, and should not be confused with the mass moment of inertia. If the piece is thin, however, the mass moment of inertia equals the area density times the area moment of inertia. Each is with respect to a horizontal axis through the centroid of the given shape, unless otherwise specified.
Area moments of inertia
| Description | Figure | Area moment of inertia | Comment | Reference |
|---|---|---|---|---|
| a filled circular area of radius r |  |    | [1] | |
| an annulus of inner radius r1 and outer radius r2 |  |    | For thin tubes,  and and  . .
We can say that |
|
| a filled circular sector of angle θ in radians and radius r with respect to an axis through the centroid of the sector and the center of the circle |  |  | This formula is valid only for 0 ≤  ≤ ≤  | |
| a filled semicircle with radius r with respect to a horizontal line passing through the centroid of the area |  |  | [2] | |
| a filled semicircle as above but with respect to an axis collinear with the base |  |  | This is a consequence of the parallel axis theorem and the fact that the distance between these two axes is  | [2] |
| a filled semicircle as above but with respect to a vertical axis through the centroid |  |  | [2] | |
| a filled quarter circle with radius r entirely in the 1st quadrant of the Cartesian coordinate system |  |  | [3] | |
| a filled quarter circle as above but with respect to a horizontal or vertical axis through the centroid |  |  | This is a consequence of the parallel axis theorem and the fact that the distance between these two axes is | [3] |
| a filled ellipse whose radius along the x-axis is a and whose radius along the y-axis is b |  |   | ||
| a filled rectangular area with a base width of b and height h |  |   | [4] | |
| a filled rectangular area as above but with respect to an axis collinear with the base |  |  | This is a result from the parallel axis theorem | [4] |
| a filled rectangular area as above but with respect to an axis collinear, where r is the perpendicular distance from the centroid of the rectangle to the axis of interest |  | This is a result from the parallel axis theorem | [4] | |
| a filled triangular area with a base width of b and height h with respect to an axis through the centroid |  |  | [5] | |
| a filled triangular area as above but with respect to an axis collinear with the base |  |  | This is a consequence of the parallel axis theorem | [5] |
| a filled regular hexagon with a side length of a |  |  | The result is valid for both a horizontal and a vertical axis through the centroid, and therefore is also valid for an axis with arbitrary direction that passes through the origin. | |
| An equal legged angle | 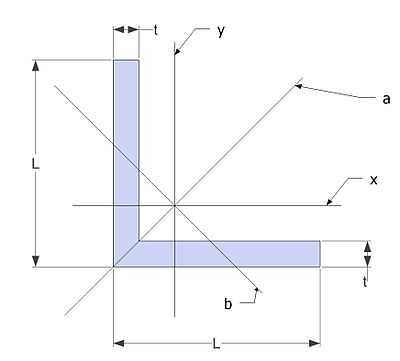 |     |  is the often unused product of inertia, used to define inertia with a rotated axis is the often unused product of inertia, used to define inertia with a rotated axis | |
| Any plane region with a known area moment of inertia for a parallel axis. (Main Article parallel axis theorem) |  |  | This can be used to determine the second moment of area of a rigid body about any axis, given the body's moment of inertia about a parallel axis through the object's center of mass and the perpendicular distance (r) between the axes. |
 and because
and because  this bracket can be simplified to
this bracket can be simplified to  . Ultimately, for a thin tube,
. Ultimately, for a thin tube,  .
.See also
References
- ↑ "Circle". eFunda. Retrieved 2006-12-30.
- ↑ 2.0 2.1 2.2 "Circular Half". eFunda. Retrieved 2006-12-30.
- ↑ 3.0 3.1 "Quarter Circle". eFunda. Retrieved 2006-12-30.
- ↑ 4.0 4.1 4.2 "Rectangular area". eFunda. Retrieved 2006-12-30.
- ↑ 5.0 5.1 "Triangular area". eFunda. Retrieved 2006-12-30.