Line–sphere intersection
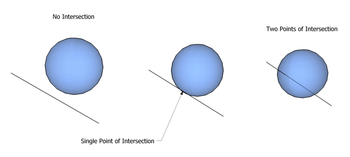
The three possible line-sphere intersections:
1. No intersection.
2. Point intersection.
3. Two point intersection.
1. No intersection.
2. Point intersection.
3. Two point intersection.
In analytic geometry, a line and a sphere can intersect in three ways: no intersection at all, at exactly one point, or in two points. Methods for distinguishing these cases, and determining equations for the points in the latter cases, are useful in a number of circumstances. For example, this is a common calculation to perform during ray tracing (Eberly 2006:698).
Calculation using vectors in 3D
In vector notation, the equations are as follows:
Equation for a sphere
 - center point
- center point - radius
- radius - points on the sphere
- points on the sphere
Equation for a line starting at 

 - distance along line from starting point
- distance along line from starting point - direction of line (a unit vector)
- direction of line (a unit vector)- - origin of the line
- - points on the line
Searching for points that are on the line and on the sphere means combining the equations and solving for :
- Equations combined
- Expanded
- Rearranged
- The form of a quadratic formula is now observable. (This quadratic equation is an example of Joachimsthal's Equation .)
- where
- Simplified
- Note that is a unit vector, and thus
 . Thus, we can simplify this further to
. Thus, we can simplify this further to









- If the value under the square-root (
 ) is less than zero, then it is clear that no solutions exist, i.e. the line does not intersect the sphere (case 1).
) is less than zero, then it is clear that no solutions exist, i.e. the line does not intersect the sphere (case 1). - If it is zero, then exactly one solution exists, i.e. the line just touches the sphere in one point (case 2).
- If it is greater than zero, two solutions exist, and thus the line touches the sphere in two points (case 3).
See also
- Analytic geometry
- Line-plane intersection
- Line of intersection between two planes
References
- David H. Eberly (2006), 3D game engine design: a practical approach to real-time computer graphics, 2nd edition, Morgan Kaufmann. ISBN 0-12-229063-1