Geographic coordinate conversion
In geodesy, conversion among different geographic coordinate systems is made necessary by the different geographic coordinate systems in use across the world and over time. Coordinate conversion comprises a number of different types of conversion: format change of geographic coordinates, conversion of coordinate systems, or transformation to different geodetic datums. Geographic coordinate conversion has applications in cartography, surveying, navigation and geographic information systems.
In geodesy, geographic coordinate conversion is defined as translation among different coordinate formats or map projections all referenced to the same geodetic datum.[1] A geographic coordinate transformation is a translation among different geodetic datums. Both geographic coordinate conversion and transformation will be considered in this article.
Coordinate format conversion
Informally, specifying a geographic location usually means giving the location's latitude and longitude. The numerical values for latitude and longitude can occur in a number of different formats:[2]
- degrees minutes seconds: 40° 26′ 46″ N 79° 58′ 56″ W
- degrees decimal minutes: 40° 26.767′ N 79° 58.933′ W
- decimal degrees: 40.446° N 79.982° W
There are 60 minutes in a degree and 60 seconds in a minute. Then to convert from a degrees minutes seconds format to a decimal degrees format, one may use the formula
-
 .
.
To convert back from decimal degree format to degrees minutes seconds format,

where the notation  means take the integer part of
means take the integer part of  .
.
Specifying a geographic location
In geodesy to unambiguously specify a location in three dimensions requires in addition to latitude and longitude, a terrestrial reference system, and the height or altitude. To specify a location on a two-dimensional map requires in addition the specification of a map projection.[3]
Terrestrial reference system
A terrestrial reference system, also called a geodetic datum, is a mathematical model of the earth's shape that defines the relation between a location and the geodetic coordinates that describe it. Modern datum models represent the earth as reference ellipsoids with a given origin and orientation. Datums may be global, meaning that they represent the whole earth, or they may be local, meaning that they represent a best-fit ellipsoid to only a portion of the earth. Examples of global datums include World Geodetic System (WGS 84), the default datum used for Global Positioning System and the International Terrestrial Reference Frame (ITRF) used for estimating continental drift and crustal deformation.[4] Local datums include the North American Datum, the European ED50, and the British OSGB36. Given a location, the datum provides the latitude  and longitude
and longitude  .
.
Height
The height is specified relative a baseline. Common baselines include [3]
- The surface of the datum ellipsoid, resulting in an ellipsoidal height
- The mean sea level as described by the gravity geoid, yielding the orthometric height
- A vertical datum, yielding a dynamic height relative to a known reference height.
Along with the latitude and longitude , the height  provides the three-dimensional geodetic coordinates or geographic coordinates for a location.[5]
provides the three-dimensional geodetic coordinates or geographic coordinates for a location.[5]
An alternative coordinate system to geodetic coordinates is the Earth-centered, Earth fixed (ECEF) geocentric coordinate system. This is a three dimensional Cartesian coordinate system with  ,
,  and
and  coordinates. In ECEF, height is implicitly defined in the coordinates. In general, the particular ECEF coordinate axes chosen are related to geodetic datum specified; thus ECEF systems of different datums are not equivalent.[3]
coordinates. In ECEF, height is implicitly defined in the coordinates. In general, the particular ECEF coordinate axes chosen are related to geodetic datum specified; thus ECEF systems of different datums are not equivalent.[3]
Map projection
To establish the position of a geographic location on a map, a map projection is used to convert geodetic coordinates to two-dimensional coordinates on a map; it projects the datum ellipsoidal coordinates and height onto a flat surface of a map. The datum, along with a map projection applied to a grid of reference locations, establishes a grid system for plotting locations. Common map projections in current use include the Universal Transverse Mercator (UTM), the Military grid reference system (MGRS), the United States National Grid (USNG), the Global Area Reference System (GARS) and the World Geographic Reference System (GEOREF).[6]
Coordinates on a map are usually in terms northing N and easting E offsets relative to a specified origin. Usually associated with a map projection is a natural origin at which the ellipsoid and flat map surfaces coincide.[7]:9-10. To ensure that the northing and easting coordinates on a map are not negative, map projections may set up false northing and false easting values that offset the true northing and easting values.
Map projection formulas depend in the geometry of the projection as well as parameters dependent on the particular location at which the map is projected. The set of parameters can vary based on type of project and the conventions chosen for the projection. For the transverse Mercator projection used in UTM, the parameters associated are the latitiude and longitude of the natural origin, the false northing and false easting, and an overall scale factor.[7]:9-10 Given the parameters associated with particular location or grin, the projection formulas for the transverse Mercator are a complex mix of algebraic and trigonometric functions.[7]:45-54
Coordinate system conversion
A coordinate system conversion is a conversion from one coordinate system to another, with both coordinate systems based on the same geodetic datum. Common conversion tasks include conversion between geodetic and ECEF coordinates and conversion from one type of map projection to another.
From geodetic to ECEF coordinates

 ). The length IQ is equal to
). The length IQ is equal to  . R =
. R =  .
.Geodetic coordinates (latitude  , longitude
, longitude  , height ) can be converted into ECEF coordinates using the following formulae:
, height ) can be converted into ECEF coordinates using the following formulae:
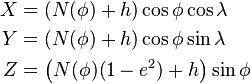
where
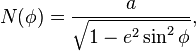
 is the semi-major axis and
is the semi-major axis and  is the first numerical eccentricity of the ellipsoid respectively. The normal is the distance from the surface to the Z-axis along the ellipsoid normal (see "Radius of curvature on the Earth").
is the first numerical eccentricity of the ellipsoid respectively. The normal is the distance from the surface to the Z-axis along the ellipsoid normal (see "Radius of curvature on the Earth").
From ECEF to geodetic coordinates
The conversion from ECEF coordinates to geodetic coordinates is a much harder problem,[8][9] except for longitude,  .
.
There exist two kinds of methods in order to solve the equation.
Newton–Raphson method
The following Bowring's irrational geodetic-latitude equation[10] is efficient to be solved by Newton–Raphson iteration method:[11]
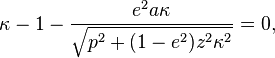
where  and
and 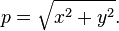 The height is calculated as:
The height is calculated as:

The iteration can be transformed into the following calculation:

where 
The constant  is a good starter value for the iteration when
is a good starter value for the iteration when  . Bowring showed that the single iteration produces a sufficiently accurate solution.
. Bowring showed that the single iteration produces a sufficiently accurate solution.
Ferrari's solution
The quartic equation for this transformation can be solved by Ferrari's solution[12][13] to yield:
![\begin{align}
\zeta &= (1 - e^2) z^2 / a^2 ,\\[6pt]
\rho &= (p^2 / a^2 + \zeta - e^4) / 6 ,\\[6pt]
s &= e^4 \zeta p^2 / ( 4 a^2) ,\\[6pt]
t &= \sqrt[3]{\rho^3 + s + \sqrt{s (s + 2 \rho^3)}} ,\\[6pt]
u &= \rho + t + \rho^2 / t ,\\[6pt]
v &= \sqrt{u^2 + e^4 \zeta} ,\\[6pt]
w &= e^2 (u + v - \zeta) / (2 v) ,\\[6pt]
\kappa &= 1 + e^2 (\sqrt{u + v + w^2} + w) / (u + v).
\end{align}](../I/m/ff94a4b38e10c9036764fbfa134cb38a.png)
Conversion across map projections
Conversion of coordinates and map positions among different map projections reference to the same datum may be accomplished either through direct translation formulas from one projection to another, or by first converting from a projection  to an intermediate coordinate system, such as ECEF, then converting from ECEF to projection
to an intermediate coordinate system, such as ECEF, then converting from ECEF to projection  . The formulas involved can be complex and in some cases, such as in the ECEF to geodetic conversion above, the conversion has no closed-form solution and approximate methods must be used. References such as the DMA Technical Manual 8358.1[14] and the USGS paper Map Projections: A Working Manual[15] contain formulas for conversion of map projections. It is common to use computer programs to perform coordinate conversion tasks, such as with the DoD and NGA supported GEOTRANS program.[16]
. The formulas involved can be complex and in some cases, such as in the ECEF to geodetic conversion above, the conversion has no closed-form solution and approximate methods must be used. References such as the DMA Technical Manual 8358.1[14] and the USGS paper Map Projections: A Working Manual[15] contain formulas for conversion of map projections. It is common to use computer programs to perform coordinate conversion tasks, such as with the DoD and NGA supported GEOTRANS program.[16]
Datum transformations
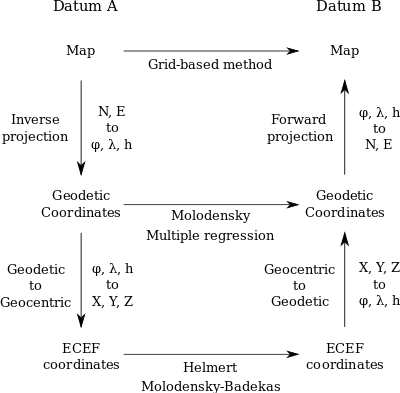
Transformations among datums can be accomplished in a number of ways. There are transformations that directly convert geodetic coordinates from one datum to another. There are more indirect transforms that convert from geodetic coordinates to ECEF coordinates, transform the ECEF coordinates from one datum to the another, then transform ECEF coordinates of the new datum back to geodetic coordinates. There are also grid-based transformations that directly transform from one (datum, map projection) pair to another (datum, map projection) pair.
Grid-based method

Grid-based transformations directly convert map coordinates from one (map-projection, geodetic datum) pair to map coordinates of another (map-projection, geodetic datum) pair. An example is the NADCON method for transforming from the North American Datum (NAD) 1927 to the NAD 1983 datum.[17] The High Accuracy Reference Network (HARN), a high accuracy version of the NADCON transforms, have an accuracy of approximately 5 centimeters. The National Transformation version 2 (NTv2) is a Canadian version of NADCON for transforming between NAD 1927 and NAD 1983. HARNs are also known as NAD 83/91 and High Precision Grid Networks (HPGN).[18] Subsequently, Australia and New Zealand adopted the NTv2 format to create grid-based methods for transforming among their own local datums.
Like the multiple regression equation transform, grid-based methods use a low-order interpolation method for converting map coordinates, but in two dimensions instead of three. The NOAA provides a software tool (as part of the NGS Geodetic Toolkit) for performing NADCON transformations.[19][20]
Molodensky transformation
The Molodensky transformation converts directly between geodetic coordinate systems of different datums without the intermediate step of converting to geocentric ECEF coordinates.[21] It requires the three shifts between the datum centers and the differences between the reference ellipsoid semi-major axes and flattening parameters.
The Molodensky transform is used by the National Geospatial-Intelligence Agency (NGA) in their standard TR8350.2 and the NGA supported GEOTRANS program.[22] The Molodensky method was popular before the advent of modern computers and the method is part of many geodetic programs.
Multiple regression equations
Datum transformations through the use of empirical multiple regression methods were created to achieve higher accuracy results over small geographic regions than the standard Molodensky transformations. MRE transforms are used to transform local datums over continent-sized or smaller regions to global datums, such as WGS 84.[23] The standard NIMA TM 8350.2, Appendix D,[24] lists MRE transforms from several local datums to WGS 84, with accuracies of about 2 meters.[25]
The MREs are a direct transformation of geodetic coordinates with no intermediate ECEF step. Geodetic coordinates  in the new datum are modeled as polynomials of up to the ninth degree in the geodetic coordinates
in the new datum are modeled as polynomials of up to the ninth degree in the geodetic coordinates  of the original datum . For instance, the change in
of the original datum . For instance, the change in  could be parameterized as (with only up to quadratic terms shown)[23]:9
could be parameterized as (with only up to quadratic terms shown)[23]:9

where
with similar equations for  and
and  . Given a sufficient number of
. Given a sufficient number of  coordinate pairs for landmarks in both datums for good statistics, multiple regression methods are used to fit the parameters of these polynomials. The polynomials, along with the fitted coefficients, form the multiple regression equations.
coordinate pairs for landmarks in both datums for good statistics, multiple regression methods are used to fit the parameters of these polynomials. The polynomials, along with the fitted coefficients, form the multiple regression equations.
Helmert transformation
Use of the Helmert transform in the transformation from geodetic coordinates of datum to geodetic coordinates of datum occurs in the context of a three-step process:[26]
- Convert from geodetic coordinates to ECEF coordinates for datum
- Apply the Helmert transform, with the appropriate
 transform parameters, to transform from datum ECEF coordinates to datum ECEF coordinates
transform parameters, to transform from datum ECEF coordinates to datum ECEF coordinates - Convert from ECEF coordinates to geodetic coordinates for datum
In terms of ECEF XYZ vectors, the Helmert transform has the form[26]

The Helmert transform is a seven-parameter transform with three translation (shift) parameters  , three rotation parameters
, three rotation parameters  and one scaling (dilation) parameter
and one scaling (dilation) parameter  . The Helmert transform is an approximate method that is accurate when the transform parameters are small relative to the magnitudes of the ECEF vectors. Under these conditions, the transform is considered reversible.[7]
. The Helmert transform is an approximate method that is accurate when the transform parameters are small relative to the magnitudes of the ECEF vectors. Under these conditions, the transform is considered reversible.[7]
A fourteen-parameter Helmert transform, with linear time dependence for each parameter,[7]:131-133 can be used to capture the time evolution of geographic coordinates dues to geomorphic processes, such as continental drift.[4]:93 and earthquakes.[27] This has been incorporated into software, such as the Horizontal Time Dependent Positioning (HTDP) tool from the U.S. NGS.[28]
Molodensky-Badekas transformation
To eliminate the coupling between the rotations and translations of the Helmert transform, three additional parameters can be introduced to give a new XYZ center of rotation closer to coordinates being transformed. This ten-parameter model is called the Molodensky-Badekas transformation and should not be confused with the more basic Molodensky transform.[7]:133-134
Like the Helmert transform, using the Molodensky-Badekas transform is a three-step process:
- Convert from geodetic coordinates to ECEF coordinates for datum
- Apply the Molodensky-Badekas transform, with the appropriate transform parameters, to transform from datum ECEF coordinates to datum ECEF coordinates
- Convert from ECEF coordinates to geodetic coordinates for datum
The transform has the form[29]

where  is the origin for the rotation and scaling transforms and
is the origin for the rotation and scaling transforms and  is the scaling factor.
is the scaling factor.
The Molodensky-Badekas transform is used to transform local geodetic datums to a global geodetic datum, such as WGS 84. Unlike the Helmert transform, the Molodensky-Badekas transform is not reversible due to the rotational origin being associated with the original datum.[7]:134
See also
- Gauss–Krüger coordinate system
- List of map projections
- Spatial reference system
- Topocentric coordinate system
- Universal polar stereographic coordinate system
- Universal Transverse Mercator coordinate system
References
- ↑ Roger Foster and Dan Mullaney. "Basic Geodesy Article 018: Conversions and Transformations". National Geospatial Intelligence Agency. Retrieved 4 March 2014.
- ↑ "Coordinate transformer". Ordnance Survey Great Britain. Retrieved 4 March 2014.
- ↑ 3.0 3.1 3.2 Taylor, Chuck. "Locating a Point On the Earth". Retrieved 4 March 2014.
- ↑ 4.0 4.1 Bolstad, Paul. GIS Fundamentals, 4th Edition. Atlas books. p. 89. ISBN 978-0-9717647-3-6.
- ↑ Kwok, Geodetic Survey Section Lands Department Hong Kong. "Geodetic Datum Transformation, p.24". Geodetic Survey Section Lands Department Hong Kong. Retrieved 4 March 2014.
- ↑ "Grids and Reference Systems". National Geospatial-Intelligence Agenc. Retrieved 4 March 2014.
- ↑ 7.0 7.1 7.2 7.3 7.4 7.5 7.6 "Geomatics Guidance Note Number 7, part 2 Coordinate Conversions and Transformations including Formulas". International Association of Oil and Gas Producers (OGP). Retrieved 5 March 2014.
- ↑ R. Burtch, A Comparison of Methods Used in Rectangular to Geodetic Coordinate Transformations.
- ↑ Featherstone, W. E.; Claessens, S. J. (2008). "Closed-Form Transformation between Geodetic and Ellipsoidal Coordinates". Stud. Geophys. Geod. 52 (1): 1–18. doi:10.1007/s11200-008-0002-6.
- ↑ Bowring, B. R. (1976). "Transformation from Spatial to Geographical Coordinates". Surv. Rev. 23 (181): 323–327. doi:10.1179/003962676791280626.
- ↑ Fukushima, T. (1999). "Fast Transform from Geocentric to Geodetic Coordinates". J. Geod. 73 (11): 603–610. doi:10.1007/s001900050271. (Appendix B)
- ↑ Vermeille, H., H. (2002). "Direct Transformation from Geocentric to Geodetic Coordinates". J. Geod. 76 (8): 451–454. doi:10.1007/s00190-002-0273-6.
- ↑ Gonzalez-Vega, Laureano; PoloBlanco, Irene (2009). "A symbolic analysis of Vermeille and Borkowski polynomials for transforming 3D Cartesian to geodetic coordinates". J. Geod 83 (11): 1071–1081. doi:10.1007/s00190-009-0325-2.
- ↑ "TM8358.2: The Universal Grids: Universal Transverse Mercator (UTM) and Universal Polar Stereographic (UPS)". National Geospatial-Intelligence Agency. Retrieved 4 March 2014.
- ↑ Snyder, John P. (1987). Map Projections: A Working Manual. USGS Professional Paper: 1395.
- ↑ "MSP GEOTRANS 3.3 (Geographic Translator)". NGA: Coordinate Systems Analysis Branch. Retrieved 4 March 2014.
- ↑ "ArcGIS Help 10.1: Grid-based methods". ESRI. Retrieved 5 March 2014.
- ↑ "NADCON/HARN Datum ShiftMethod". bluemarblegeo.com. Retrieved 5 March 2014.
- ↑ "NADCON - Version 4.2". NOAA. Retrieved 5 March 2014.
- ↑ Mulcare, Donald M. "NGS Toolkit, Part 8: The National Geodetic Survey NADCON Tool". Professional Surveyor Magazine. Retrieved 5 March 2014.
- ↑ "ArcGIS Help 10.1: Equation-based methods". ESRI. Retrieved 5 March 2014.
- ↑ "Datum Transformations". National Geospatial-Intelligence Agency. Retrieved 5 March 2014.
- ↑ 23.0 23.1 "USER’s HANDBOOK ON DATUM TRANSFORMATIONS INVOLVING WGS 84". International Hydrographic Bureau. Retrieved 5 March 2014.
- ↑ "DEPARTMENT OF DEFENSE WORLD GEODETIC SYSTEM 1984 Its Definition and Relationships with Local Geodetic Systems". National Imagery and Mapping Agency (NIMA). Retrieved 5 March 2014.
- ↑ Taylor, Chuck. "High-Accuracy Datum Transformations". Retrieved 5 March 2014.
- ↑ 26.0 26.1 "Equations Used for Datum Transformations". Land Information New Zealand (LINZ). Retrieved 5 March 2014.
- ↑ "Addendum to NIMA TR 8350.2: Implementation of the World Geodetic System 1984 (WGS 84) Reference Frame G1150". National Geospatial-Intelligence Agency. Retrieved 6 March 2014.
- ↑ "HTDP - Horizontal Time-Dependent Positioning". U.S. National Geodetic Survey (NGS). Retrieved 5 March 2014.
- ↑ "Molodensky-Badekas (7+3) Transformations". National Geospatial Intelligence Agency (NGA). Retrieved 5 March 2014.
External links
- MapTools, an online geographic coordinates converter