Fin

A fin is a thin component or appendage attached to a larger body or structure. Fins typically function as foils that produce lift or thrust, or provide the ability to steer or stabilize motion while traveling in water, air, or other fluid media. Fins are also used to increase surface areas for heat transfer purposes, or simply as ornamentation.[1][2]
Fins first evolved on fish as a means of locomotion. Fish fins are used to generate thrust and control the subsequent motion. Fish, and other aquatic animals such as cetaceans, actively propel and steer themselves with pectoral and tail fins. As they swim, they use other fins, such as dorsal and anal fins to achieve stability and refine their maneuvering.[3][4]
Generating thrust
Foil shaped fins generate thrust when moved, the lift of the fin sets water or air in motion and pushes the fin in the opposite direction. Aquatic animals get significant thrust by moving fins back and forth in water. Often the tail fin is used, but some aquatic animals generate thrust from pectoral fins.[3] Fins can also generate thrust if they are rotated in air or water. Turbines and propellers (and sometimes fans and pumps) use a number of rotating fins, also called foils, wings, arms or blades. Propellers use the fins to translate torquing force to lateral thrust, thus propelling an aircraft or ship.[5] Turbines work in reverse, using the lift of the blades to generate torque and power from moving gases or water.[6]







_diagram_cropped.GIF)
Finlets may influence the way a vortex develops around the tail fin.
Cavitation can be a problem with high power applications, resulting in damage to propellers or turbines, as well as noise and loss of power.[7] Cavitation occurs when negative pressure causes bubbles (cavities) to form in a liquid, which then promptly and violently collapse. It can cause significant damage and wear.[7] Cavitation damage can also occur to the tail fins of powerful swimming marine animals, such as dolphins and tuna. Cavitation is more likely to occur near the surface of the ocean, where the ambient water pressure is relatively low. Even if they have the power to swim faster, dolphins may have to restrict their speed because collapsing cavitation bubbles on their tail are too painful.[8] Cavitation also slows tuna, but for a different reason. Unlike dolphins, these fish do not feel the bubbles, because they have bony fins without nerve endings. Nevertheless, they cannot swim faster because the cavitation bubbles create a vapor film around their fins that limits their speed. Lesions have been found on tuna that are consistent with cavitation damage.[8]
Scombrid fishes (tuna, mackerel and bonito) are particularly high-performance swimmers. Along the margin at the rear of their bodies is a line of small rayless, non-retractable fins, known as finlets. There has been much speculation about the function of these finlets. Research done in 2000 and 2001 by Nauen and Lauder indicated that "the finlets have a hydrodynamic effect on local flow during steady swimming" and that "the most posterior finlet is oriented to redirect flow into the developing tail vortex, which may increase thrust produced by the tail of swimming mackerel".[9][10][11]
Fish use multiple fins, so it is possible that a given fin can have a hydrodynamic interaction with another fin. In particular, the fins immediately upstream of the caudal (tail) fin may be proximate fins that can directly affect the flow dynamics at the caudal fin. In 2011, researchers using volumetric imaging techniques were able to generate "the first instantaneous three-dimensional views of wake structures as they are produced by freely swimming fishes". They found that "continuous tail beats resulted in the formation of a linked chain of vortex rings" and that "the dorsal and anal fin wakes are rapidly entrained by the caudal fin wake, approximately within the timeframe of a subsequent tail beat".[12]
Controlling motion

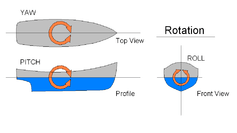
Once motion has been established, the motion itself can be controlled with the use of other fins.[3][15][16] Boats control direction (yaw) with fin-like rudders, and roll with stabilizer fins and keel fins.[15] Airplanes achieve similar results with small specialised fins that change the shape of their wings and tail fins.[16]
.jpg)





Stabilising fins are used as fletching on arrows and some darts,[21] and at the rear of some bombs, missiles, rockets, and self-propelled torpedoes.[22][23] These are typically planar and shaped like small wings, although grid fins are sometimes used.[24] Static fins have also been used for one satellite, GOCE.



Regulating temperature
Engineering fins are also used as heat transfer fins to regulate temperature in heat sinks or fin radiators.[25][26]



Ornamentation and other uses
In biology, fins can have an adaptive significance as sexual ornaments. During courtship, the female cichlid, Pelvicachromis taeniatus, displays a large and visually arresting purple pelvic fin. "The researchers found that males clearly preferred females with a larger pelvic fin and that pelvic fins grew in a more disproportionate way than other fins on female fish."[30][31]



Reshaping human feet with swim fins, rather like the tail fin of a fish, add thrust and efficiency to the kicks of a swimmer or underwater diver[35][36] Surfboard fins provide surfers with means to manoeuvre and control their boards. Contemporary surfboards often have a centre fin and two cambered side fins.[37]
The bodies of reef fishes are often shaped differently from open water fishes. Open water fishes are usually built for speed, streamlined like torpedoes to minimise friction as they move through the water. Reef fish operate in the relatively confined spaces and complex underwater landscapes of coral reefs. For this manoeuvrability is more important than straight line speed, so coral reef fish have developed bodies which optimize their ability to dart and change direction. They outwit predators by dodging into fissures in the reef or playing hide and seek around coral heads.[38] The pectoral and pelvic fins of many reef fish, such as butterflyfish, damselfish and angelfish, have evolved so they can act as brakes and allow complex manoeuvres.[39] Many reef fish, such as butterflyfish, damselfish and angelfish, have evolved bodies which are deep and laterally compressed like a pancake, and will fit into fissures in rocks. Their pelvic and pectoral fins are designed differently, so they act together with the flattened body to optimise manoeuvrability.[38] Some fishes, such as puffer fish, filefish and trunkfish, rely on pectoral fins for swimming and hardly use tail fins at all.[39]






Evolution of fins
.png)
(1) pectoral fins (paired), (2) pelvic fins (paired), (3) dorsal fin, (4) adipose fin, (5) anal fin, (6) caudal (tail) fin
Aristotle recognised the distinction between analogous and homologous structures, and made the following prophetic comparison: "Birds in a way resemble fishes. For birds have their wings in the upper part of their bodies and fishes have two fins in the front part of their bodies. Birds have feet on their underpart and most fishes have a second pair of fins in their under-part and near their front fins."
There is an old theory, which has been often disregarded in science textbooks, "that fins and (later) limbs evolved from the gills of an extinct vertebrate". Gaps in the fossil record had not allowed a definitive conclusion. In 2009, researchers from the University of Chicago found evidence that the "genetic architecture of gills, fins and limbs is the same", and that "the skeleton of any appendage off the body of an animal is probably patterned by the developmental genetic program that we have traced back to formation of gills in sharks".[45][46][47]
Fish are the ancestors of all mammals, reptiles, birds and amphibians.[48] In particular, terrestrial tetrapods (four-legged animals) evolved from fish and made their first forays onto land 400 million years ago. They used paired pectoral and pelvic fins for locomotion. The pectoral fins developed into forelegs (arms in the case of humans) and the pelvic fins developed into hind legs.[49] Much of the genetic machinery that builds a walking limb in a tetrapod is already present in the swimming fin of a fish.[50][51]


In 2011, researchers at Monash University in Australia used primitive but still living lungfish "to trace the evolution of pelvic fin muscles to find out how the load-bearing hind limbs of the tetrapods evolved."[52][53] Further research at the University of Chicago found bottom-walking lungfishes had already evolved characteristics of the walking gaits of terrestrial tetrapods.[54][55]
In a classic example of convergent evolution, the pectoral limbs of pterosaurs, birds and bats further evolved along independent paths into flying wings. Even with flying wings there are many similarities with walking legs, and core aspects of the genetic blueprint of the pectoral fin have been retained.[56][57]
About 200 million years ago the first mammals appeared. A group of these mammals started returning to the sea about 52 million years ago, thus completing a circle. These are the cetaceans (whales, dolphins and porpoises). Recent DNA analysis suggests that cetaceans evolved from within the even-toed ungulates, and that they share a common ancestor with the hippopotamus.[58][59] About 23 million years ago another group of bearlike land mammals started returning to the sea. These were the seals.[60] What had become walking limbs in cetaceans and seals evolved further, independently in a reverse form of convergent evolution, back to new forms of swimming fins. The forelimbs became flippers and the hind limbs became a tail terminating in two fins, called a fluke in the case of cetaceans.[61] Fish tails are usually vertical and move from side to side. Cetacean flukes are horizontal and move up and down, because cetacean spines bend the same way as in other mammals.[62][63]
Ichthyosaurs are ancient reptiles that resembled dolphins. They first appeared about 245 million years ago and disappeared about 90 million years ago.
"This sea-going reptile with terrestrial ancestors converged so strongly on fishes that it actually evolved a dorsal fin and tail in just the right place and with just the right hydrological design. These structures are all the more remarkable because they evolved from nothing — the ancestral terrestrial reptile had no hump on its back or blade on its tail to serve as a precursor."[64]
The biologist Stephen Jay Gould said the ichthyosaur was his favorite example of convergent evolution.[65]
Robotic fins

|
| |
|
| |
|
| |
|
| |
|
|
The use of fins for the propulsion of aquatic animals can be remarkably effective. It has been calculated that some fish can achieve a propulsive efficiency greater than 90%.[3] Fish can accelerate and maneuver much more effectively than boats or submarine, and produce less water disturbance and noise. This has led to biomimetic studies of underwater robots which attempt to emulate the locomotion of aquatic animals.[66] An example is the Robot Tuna built by the Institute of Field Robotics, to analyze and mathematically model thunniform motion.[67] In 2005, the Sea Life London Aquarium displayed three robotic fish created by the computer science department at the University of Essex. The fish were designed to be autonomous, swimming around and avoiding obstacles like real fish. Their creator claimed that he was trying to combine "the speed of tuna, acceleration of a pike, and the navigating skills of an eel."[68][69][70]
The AquaPenguin, developed by Festo of Germany, copies the streamlined shape and propulsion by front flippers of penguins.[71][72] Festo also developed AquaRay,[73] AquaJelly[74] and AiraCuda,[75] respectively emulating the locomotion of manta rays, jellyfish and barracuda.
In 2004, Hugh Herr at MIT prototyped a biomechatronic robotic fish with a living actuator by surgically transplanting muscles from frog legs to the robot and then making the robot swim by pulsing the muscle fibers with electricity.[76][77]
Robotic fish offer some research advantages, such as the ability to examine an individual part of a fish design in isolation from the rest of the fish. However, this risks oversimplifying the biology so key aspects of the animal design are overlooked. Robotic fish also allow researchers to vary a single parameter, such as flexibility or a specific motion control. Researchers can directly measure forces, which is not easy to do in live fish. "Robotic devices also facilitate three-dimensional kinematic studies and correlated hydrodynamic analyses, as the location of the locomotor surface can be known accurately. And, individual components of a natural motion (such as outstroke vs. instroke of a flapping appendage) can be programmed separately, which is certainly difficult to achieve when working with a live animal."[78]
See also
References
- ↑ Fin Oxford dictionary. Retrieved 24 November 2012.
- ↑ Fin Merriam-Webster dictionary. Retrieved 24 November 2012.
- ↑ 3.0 3.1 3.2 3.3 Sfakiotakis, M; Lane, DM; Davies, JBC (1999). "Review of Fish Swimming Modes for Aquatic Locomotion" (PDF). IEEE Journal of Oceanic Engineering 24: 2.
- ↑ Helfman G, Collette BB, Facey DE and Bowen BW (2009) "Functional morphology of locomotion and feeding" Chapter 8, pp. 101–116. In:The Diversity of Fishes: Biology, John Wiley & Sons. ISBN 9781444311907.
- ↑ Carlton, John (2007) Marine Propellers and Propulsion Pages 1–28, Butterworth-Heinemann. ISBN 9780750681506.
- ↑ Soares, Claire (2008) Gas Turbines: A Handbook of Air, Land, and Sea Applications Pages 1–23, Butterworth-Heinemann. ISBN 9780750679695.
- ↑ 7.0 7.1 Franc, Jean-Pierre and Michel, Jean-Marie (2004) Fundamentals of Cavitation Springer. ISBN 9781402022326.
- ↑ 8.0 8.1 Brahic, Catherine (2008-03-28). "Dolphins swim so fast it hurts". NewScientist. Retrieved 2008-03-31.
- ↑ Nauen, JC; Lauder, GV (2001a). "Locomotion in scombrid fishes: visualization of flow around the caudal peduncle and finlets of the Chub mackerel Scomber japonicus". Journal of Experimental Biology 204 (13): 2251–63.
- ↑ Nauen, JC; Lauder, GV (2001b). "Three-dimensional analysis of finlet kinematics in the Chub mackerel (Scomber japonicus)". The Biological Bulletin 200 (1): 9–19. doi:10.2307/1543081.
- ↑ Nauen, JC; Lauder, GV (2000). "Locomotion in scombrid fishes: morphology and kinematics of the finlets of the Chub mackerel Scomber japonicus" (PDF). Journal of Experimental Biology 203 (15): 2247–59.
- ↑ Flammang, BE; Lauder, GV; Troolin, DR; Strand, TE (2011). "Volumetric imaging of fish locomotion". Biology Letters 7 (5): 695–698. doi:10.1098/rsbl.2011.0282.
- ↑
- Fish, FE (2002). "Balancing requirements for stability and maneuverability in cetaceans". Integrative and Comparative Biology 42 (1): 85–93. doi:10.1093/icb/42.1.85.
- ↑
- Fish, FE; Lauder, GV (2006). ""Passive and active flow control by swimming fishes and mammals"". Annual Review of Fluid Mechanics 38 (1): 193–224. doi:10.1146/annurev.fluid.38.050304.092201.
- ↑ 15.0 15.1 Perez, Tristan (2005) Ship Motion Control: Course Keeping and Roll Stabilisation Using Rudder and Fins Springer. ISBN 9781852339593.
- ↑ 16.0 16.1 McClamroch, N Harris (2011) Steady Aircraft Flight and Performance Page 2–3, Princeton University Press. ISBN 9780691147192.
- ↑ Magnuson JJ (1978) "Locomotion by scombrid fishes: Hydromechanics, morphology and behavior" in Fish Physiology, Volume 7: Locomotion, WS Hoar and DJ Randall (Eds) Academic Press. Page 240–308. ISBN 9780123504074.
- ↑ Ship's movements at sea Retrieved 22 November 2012.
- ↑ Rana and Joag (2001) Classical Mechanics Page 391, Tata McGraw-Hill Education. ISBN 9780074603154.
- ↑ Lingham; Soliar, T (2005). "Dorsal fin in the white shark, Carcharodon carcharias: A dynamic stabilizer for fast swimming". Journal of Morphology 263 (1): 1–11. doi:10.1002/jmor.10207.
- ↑ Vujic, Dragan (2007) Bow Hunting Whitetails Page 17, iUniverse. ISBN 9780595432073.
- ↑ Hobbs, Marvin (2010) Basics of Missile Guidance and Space Techniques Page 24, Wildside Press LLC. ISBN 9781434421258.
- ↑ Compon-Hall, Richard (2004) Submarines at War 1939-1945 Page 50, Periscope Publishing. ISBN 9781904381228.
- ↑ Khalid M, Sun Y and Xu H (1998) "Computation of Flows Past Grid Fin Missiles" AVT Symposium on Missile Aerodynamics, Sorrento, Italy.
- ↑ Siegel R and Howell JR (2002) Thermal Radiation Heat Transfer Chapter 9: Radiation combined with conduction and convection at boundaries, pp.335–370. Taylor & Francis. ISBN 9781560328391.
- ↑ Fin: Function in aircraft engines Encyclopaedia Britannica. Retrieved 22 November 2012.
- ↑ Clarke, Massimo (2010) Modern Motorcycle Technology Page 62, MotorBooks International. ISBN 9780760338193.
- ↑ Aquatic Life of the World pp. 332–333, Marshall Cavendish Corporation, 2000. ISBN 9780761471707.
- ↑ Dement J Species Spotlight: Atlantic Sailfish (Istiophorus albicans) littoralsociety.org. Retrieved 1 April 2012.
- ↑ Female fish flaunt fins to attract a mate ScienceDaily. 8 October 2010.
- ↑ Baldauf SA, TCM Bakker, F Herder, H Kullmann and T Thünken (2010) "Male mate choice scales female ornament allometry in a cichlid fish" BMC Evolutionary Biologr//, 10 :301. doi:10.1186/1471-2148-10-301
- ↑ Halstead, L.B. (1975). The Evolution and Ecology of the Dinosaurs. London: Eurobook Limited. pp. 1–116. ISBN 0-85654-018-8.
- ↑ Stromer, E. (1915). "Ergebnisse der Forschungsreisen Prof. E. Stromers in den Wüsten Ägyptens. II. Wirbeltier-Reste der Baharije-Stufe (unterstes Cenoman). 3. Das Original des Theropoden Spinosaurus aegyptiacus nov. gen., nov. spec". Abhandlungen der Königlich Bayerischen Akademie der Wissenschaften, Mathematisch-physikalische Klasse (in German) 28 (3): 1–32.
- ↑ David, Dennis (2001) Fifties Fins MotorBooks International. ISBN 9780760309612.
- ↑ Zamparo P, Pendergast DR, Termin A, Minetti AE; Pendergast; Termin; Minetti (March 2006). "Economy and efficiency of swimming at the surface with fins of different size and stiffness". Eur. J. Appl. Physiol. 96 (4): 459–70. doi:10.1007/s00421-005-0075-7. PMID 16341874.
- ↑ Yamaguchi H, Shidara F, Naraki N, Mohri M; Shidara; Naraki; Mohri (September 1995). "Maximum sustained fin-kick thrust in underwater swimming". Undersea Hyperb Med 22 (3): 241–8. PMID 7580765. Retrieved 2008-08-25.
- ↑ Brandner PA and Walker GJ (2004) Hydrodynamic Performance of a Surfboard Fin 15th Australasian Fluid Mechanics Conference, Sydney.
- ↑ 38.0 38.1 38.2 Alevizon WS (1994) "Pisces Guide to Caribbean Reef Ecology" Gulf Publishing Company ISBN 1-55992-077-7
- ↑ 39.0 39.1 Ichthyology Florida Museum of Natural History. Retrieved 22 November 2012.
- ↑ Vannuccini S (1999). "Shark utilization, marketing and trade". FAO Fisheries Technical Paper (Rome: FAO) 389.
- ↑ Ridhwan CZ (2008) Aerodynamics of aftermarket rear spoiler University Malaysia Pahang
- ↑ Bertelsen E and Pietsch TW (1998). Encyclopedia of Fishes. San Diego: Academic Press. pp. 138–139. ISBN 0-12-547665-5.
- ↑ Fish, FE (1990). "Wing design and scaling of flying fish with regard to flight performance" (PDF). Journal of Zoology 221 (3): 391–403. doi:10.1111/j.1469-7998.1990.tb04009.x.
- ↑ Moore, John A (1988). ""Understanding nature—form and function"". American Zoologist 28: 449–584 [485].
- ↑ Evolution Of Fins And Limbs Linked With That Of Gills ScienceDaily. 25 March 2009.
- ↑ Gillis, JA; Dahn, RD; Shubin, NH (2009). "Shared developmental mechanisms pattern the vertebrate gill arch and paired fin skeletons". Proceedings of the National Academy of Sciences 106 (14): 5720–5724. doi:10.1073/pnas.0810959106.
- ↑ Wings, legs, and fins: How do new organs arise in evolution? Neil Shubin, University of Chicago.
- ↑ "Primordial Fish Had Rudimentary Fingers" ScienceDaily, 23 September 2008.
- ↑ Hall, Brian K (2007) Fins into Limbs: Evolution, Development, and Transformation University of Chicago Press. ISBN 9780226313375.
- ↑ Shubin, Neil (2009) Your inner fish: A journey into the 3.5 billion year history of the human body Vintage Books. ISBN 9780307277459. UCTV interview
- ↑ Clack, Jennifer A (2012) "From fins to feet" Chapter 6, pages 187–260, in: Gaining Ground, Second Edition: The Origin and Evolution of Tetrapods, Indiana University Press. ISBN 9780253356758.
- ↑ Lungfish Provides Insight to Life On Land: 'Humans Are Just Modified Fish' ScienceDaily, 7 October 2011.
- ↑ Cole NJ, Hall TE, Don EK, Berger S, Boisvert CA, et al. (2011) "Development and Evolution of the Muscles of the Pelvic Fin" PLoS Biology, 9 (10): e1001168. doi:10.1371/journal.pbio.1001168

- ↑ A small step for lungfish, a big step for the evolution of walking" ScienceDaily, 13 December 2011.
- ↑ King, HM; Shubin, NH; Coates, MI; Hale, ME (2011). "Behavioral evidence for the evolution of walking and bounding before terrestriality in sarcopterygian fishes". Proceedings of the National Academy of Sciences 108 (52): 21146–21151. doi:10.1073/pnas.1118669109.
- ↑ Shubin, N; Tabin, C; Carroll, S (1997). ""Fossils, genes and the evolution of animal limbs"". Nature 388: 639–648.
- ↑ Vertebrate flight: The three solutions University of California. Updated 29 September 2005.
- ↑ "Scientists find missing link between the dolphin, whale and its closest relative, the hippo". Science News Daily. 2005-01-25. Retrieved 2007-06-18.
- ↑ Gatesy, J. (1 May 1997). "More DNA support for a Cetacea/Hippopotamidae clade: the blood-clotting protein gene gamma-fibrinogen". Molecular Biology and Evolution 14 (5): 537–543. doi:10.1093/oxfordjournals.molbev.a025790. PMID 9159931.
- ↑ John J. Flynn et al. (2005). "Molecular Phylogeny of the Carnivora". Systematic Biology 54 (2): 317–337. doi:10.1080/10635150590923326. PMID 16012099. Missing
|last3=in Authors list (help) - ↑ Felts WJL "Some functional and structural characteristics of cetacean flippers and flukes" Pages 255–275 in: Norris KS (ed.) Whales, Dolphins, and Porpoises, University of California Press.
- ↑ The evolution of whales University of California Museum. Retrieved 27 November 2012.
- ↑ Thewissen, JGM; Cooper, LN; George, JC; Bajpai, S (2009). "From Land to Water: the Origin of Whales, Dolphins, and Porpoises" (PDF). Evo Edu Outreach 2 (2): 272–288. doi:10.1007/s12052-009-0135-2.
- ↑ Martill D.M. (1993). "Soupy Substrates: A Medium for the Exceptional Preservation of Ichthyosaurs of the Posidonia Shale (Lower Jurassic) of Germany". Kaupia - Darmstädter Beiträge zur Naturgeschichte, 2 : 77-97.
- ↑ Gould,Stephen Jay (1993 "Bent Out of Shape" in Eight Little Piggies: Reflections in Natural History. Norton, 179–94. ISBN 9780393311396.
- ↑ Richard Mason. "What is the market for robot fish?".
- ↑ Witoon Juwarahawong. "Fish Robot". Institute of Field Robotics. Archived from the original on 2007-11-04. Retrieved 2007-10-25.
- ↑ "Robotic fish powered by Gumstix PC and PIC". Human Centred Robotics Group at Essex University. Retrieved 2007-10-25.
- ↑ "Robotic fish make aquarium debut". cnn.com. CNN. 10 October 2005. Retrieved 12 June 2011.
- ↑ Walsh, Dominic (3 May 2008). "Merlin Entertainments tops up list of London attractions with aquarium buy". thetimes.co.uk. Times of London. Retrieved 12 June 2011.
- ↑ For Festo, Nature Shows the Way Control Engineering, 18 May 2009.
- ↑ Bionic penguins fly through water... and air Gizmag, 27 April 2009.
- ↑ Festo AquaRay Robot Technovelgy, 20 April 2009.
- ↑ The AquaJelly Robotic Jellyfish from Festo Engineering TV, 12 July 2012.
- ↑ Lightweight robots: Festo's flying circus The Engineer, 18 July 2011.
- ↑ Huge Herr, D. Robert G (Oct 2004). "A Swimming Robot Actuated by Living Muscle Tissue". Journal of NeuroEngineering and Rehabilitation 1 (1): 6. doi:10.1186/1743-0003-1-6. PMC 544953. PMID 15679914.
- ↑ How Biomechatronics Works HowStuffWorks/ Retrieved 22 November 2012.
- ↑ Lauder, G. V. (2011). "Swimming hydrodynamics: ten questions and the technical approaches needed to resolve them" (PDF). Experiments in fluids 51 (1): 23–35.
Further reading
- Blake, Robert William (2004). "Fish functional design and swimming performance". Journal of Fish Biology 65 (5): 1193–1222. doi:10.1111/j.0022-1112.2004.00568.x.
- Blake, Robert William (1983) Fish Locomotion CUP Archive. ISBN 9780521243032.
- Breder, CM (1926). "The locomotion of fishes". Zoologica 4: 159–297.
- Fish, FE; Peacock, JE; Rohr, JJ (2002). "Stabilization Mechanism in Swimming Odontocete Cetaceans by Phased Movements" (PDF). Marine Mammal Science 19 (3): 515–528. doi:10.1111/j.1748-7692.2003.tb01318.x.
- Hawkins, JD; Sepulveda, CA; Graham, JB; Dickson, KA (2003). "Swimming performance studies on the eastern Pacific bonito Sarda chiliensis, a close relative of the tunas (family Scombridae) II. Kinematics". The Journal of Experimental Biology 206 (16): 2749–2758.
- Lauder, GV; Drucker, EG (2004). "Morphology and experimental hydrodynamics of fish fin control surfaces" (PDF). Journal of Oceanic Engineering 29 (3): 556–571. doi:10.1109/joe.2004.833219.
- Lauder, GV; Madden, PGA (2007). "Fish locomotion: kinematics and hydrodynamics of flexible foil-like fins" (PDF). Experiments in Fluids 43 (5): 641–653. doi:10.1007/s00348-007-0357-4.
- Standen, EM (2009). "Muscle activity and hydrodynamic function of pelvic fins in trout (Oncorhynchus mykiss)" (PDF). The Journal of Experimental Biology 213 (5): 831–841. doi:10.1242/jeb.033084.
- Tangorra JL, CEsposito CJ and Lauder GV (2009) "Biorobotic fins for investigations of fish locomotion" In: Intelligent Robots and Systems, pages: 2120–2125. E-ISBN 978-1-4244-3804-4.
- Tu X and Terzopoulos D (1994) "Artificial fishes: Physics, locomotion, perception, behavior" In: Proceedings of the 21st annual conference on Computer graphics and interactive techniques, pages 43–50. ISBN 0-89791-667-0. doi:10.1145/192161.192170
- Weihs, Daniel (2002). "Stability versus maneuverability in aquatic locomotion". Integrated and Computational Biology 42 (1): 127–134. doi:10.1093/icb/42.1.127.
External links
|
| |
|
| |
|
| |
|
| |
|
|
- Locomotion in Fish Earthlife.
- Computational fluid dynamics tutorial Many examples and images, with references to robotic fish.
- Fish Skin Research University of British Columbia.
- A fin-tuned design The Economist, 19 November 2008.
| ||||||||||||||||||||||||