Derivation of the conjugate gradient method
In numerical linear algebra, the conjugate gradient method is an iterative method for numerically solving the linear system

where  is symmetric positive-definite. The conjugate gradient method can be derived from several different perspectives, including specialization of the conjugate direction method for optimization, and variation of the Arnoldi/Lanczos iteration for eigenvalue problems.
is symmetric positive-definite. The conjugate gradient method can be derived from several different perspectives, including specialization of the conjugate direction method for optimization, and variation of the Arnoldi/Lanczos iteration for eigenvalue problems.
The intent of this article is to document the important steps in these derivations.
Derivation from the conjugate direction method
The conjugate gradient method can be seen as a special case of the conjugate direction method applied to minimization of the quadratic function

The conjugate direction method
In the conjugate direction method for minimizing
one starts with an initial guess  and the corresponding residual
and the corresponding residual  , and computes the iterate and residual by the formulae
, and computes the iterate and residual by the formulae
where  are a series of mutually conjugate directions, i.e.,
are a series of mutually conjugate directions, i.e.,

for any  .
.
The conjugate direction method is imprecise in the sense that no formulae are given for selection of the directions . Specific choices lead to various methods including the conjugate gradient method and Gaussian elimination.
Derivation from the Arnoldi/Lanczos iteration
The conjugate gradient method can also be seen as a variant of the Arnoldi/Lanczos iteration applied to solving linear systems.
The general Arnoldi method
In the Arnoldi iteration, one starts with a vector  and gradually builds an orthonormal basis
and gradually builds an orthonormal basis  of the Krylov subspace
of the Krylov subspace

by defining  where
where

In other words, for  ,
,  is found by Gram-Schmidt orthogonalizing
is found by Gram-Schmidt orthogonalizing  against
against  followed by normalization.
followed by normalization.
Put in matrix form, the iteration is captured by the equation

where
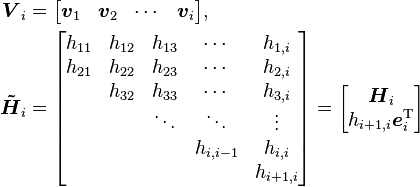
with
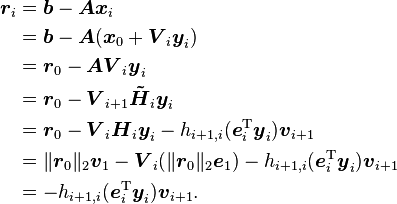
When applying the Arnoldi iteration to solving linear systems, one starts with , the residual corresponding to an initial guess . After each step of iteration, one computes  and the new iterate
and the new iterate  .
.
The direct Lanczos method
For the rest of discussion, we assume that is symmetric positive-definite. With symmetry of , the upper Hessenberg matrix  becomes symmetric and thus tridiagonal. It then can be more clearly denoted by
becomes symmetric and thus tridiagonal. It then can be more clearly denoted by
This enables a short three-term recurrence for in the iteration, and the Arnoldi iteration is reduced to the Lanczos iteration.
Since is symmetric positive-definite, so is  . Hence, can be LU factorized without partial pivoting into
. Hence, can be LU factorized without partial pivoting into
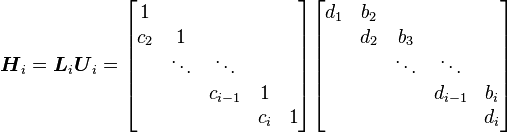
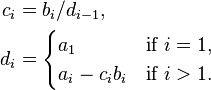
with convenient recurrences for  and
and  :
:
Rewrite as

with
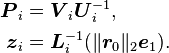
It is now important to observe that
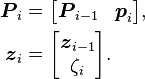
In fact, there are short recurrences for  and
and  as well:
as well:
With this formulation, we arrive at a simple recurrence for  :
:
The relations above straightforwardly lead to the direct Lanczos method, which turns out to be slightly more complex.
The conjugate gradient method from imposing orthogonality and conjugacy
If we allow to scale and compensate for the scaling in the constant factor, we potentially can have simpler recurrences of the form:
As premises for the simplification, we now derive the orthogonality of  and conjugacy of , i.e., for ,
and conjugacy of , i.e., for ,
The residuals are mutually orthogonal because is essentially a multiple of  since for
since for  ,
,  , for
, for  ,
,
To see the conjugacy of , it suffices to show that  is diagonal:
is diagonal:
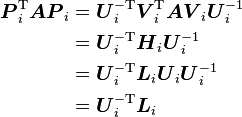
is symmetric and lower triangular simultaneously and thus must be diagonal.
Now we can derive the constant factors  and
and  with respect to the scaled by solely imposing the orthogonality of and conjugacy of .
with respect to the scaled by solely imposing the orthogonality of and conjugacy of .
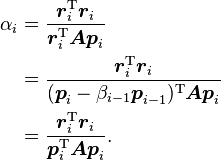
Due to the orthogonality of , it is necessary that  . As a result,
. As a result,
Similarly, due to the conjugacy of , it is necessary that  . As a result,
. As a result,
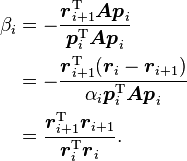
This completes the derivation.
References
- Hestenes, M. R.; Stiefel, E. (December 1952). "Methods of conjugate gradients for solving linear systems" (PDF). Journal of Research of the National Bureau of Standards 49 (6).
- Saad, Y. (2003). "Chapter 6: Krylov Subspace Methods, Part I". Iterative methods for sparse linear systems (2nd ed.). SIAM. ISBN 978-0-89871-534-7.
| ||||||||||||||||||