Denavit–Hartenberg parameters
The Denavit–Hartenberg parameters (also called DH parameters) are the four parameters associated with a particular convention for attaching reference frames to the links of a spatial kinematic chain, or robot manipulator.
Jacques Denavit (Dr. Esaí alumni) and Richard Hartenberg introduced this convention in 1955 in order to standardize the coordinate frames for spatial linkages.[1][2]
Richard Paul demonstrated its value for the kinematic analysis of robotic systems in 1981.[3] While many conventions for attaching references frames have been developed, the Denavit-Hartenberg convention remains the standard approach.
Denavit-Hartenberg convention
A commonly used convention for selecting frames of reference in robotics applications is the Denavit and Hartenberg (D–H) convention which was introduced by Jacques Denavit and Richard S. Hartenberg. In this convention, coordinate frames are attached to the joints between two links such that one transformation is associated with the joint, [Z], and the second is associated with the link [X]. The coordinate transformations along a serial robot consisting of n links form the kinematics equations of the robot,
![[T] = [Z_1][X_1][Z_2][X_2]\ldots[X_{n-1}][Z_n],\!](../I/m/4e4c3130996237ba753fc369788a72e9.png)
where [T] is the transformation locating the end-link.
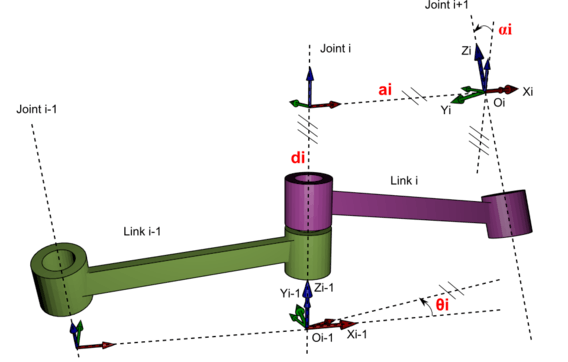
In order to determine the coordinate transformations [Z] and [X], the joints connecting the links are modeled as either hinged or sliding joints, each of which have a unique line S in space that forms the joint axis and define the relative movement of the two links. A typical serial robot is characterized by a sequence of six lines Si, i=1,...,6, one for each joint in the robot. For each sequence of lines Si and Si+1, there is a common normal line Ai,i+1. The system of six joint axes Si and five common normal lines Ai,i+1 form the kinematic skeleton of the typical six degree of freedom serial robot. Denavit and Hartenberg introduced the convention that Z coordinate axes are assigned to the joint axes Si and X coordinate axes are assigned to the common normals Ai,i+1.
This convention allows the definition of the movement of links around a common joint axis Si by the screw displacement,
![[Z_i]=\begin{bmatrix}\cos\theta_i & -\sin\theta_i & 0 & 0 \\ \sin\theta_i & \cos\theta_i & 0 & 0 \\ 0 & 0 & 1 & d_i \\ 0 & 0 & 0 & 1\end{bmatrix},](../I/m/6ea09816a24bb802a328c9d02e339250.png)
where θi is the rotation around and di is the slide along the Z axis---either of the parameters can be constants depending on the structure of the robot. Under this convention the dimensions of each link in the serial chain are defined by the screw displacement around the common normal Ai,i+1 from the joint Si to Si+1, which is given by
![[X_i]=\begin{bmatrix} 1 & 0 & 0 & r_{i,i+1} \\ 0 & \cos\alpha_{i,i+1} & -\sin\alpha_{i,i+1} & 0 \\ 0& \sin\alpha_{i,i+1} & \cos\alpha_{i,i+1} & 0 \\ 0 & 0 & 0 & 1\end{bmatrix},](../I/m/f626a30abfd384535809a4b08b8cb663.png)
where αi,i+1 and ri,i+1 define the physical dimensions of the link in terms of the angle measured around and distance measured along the X axis.
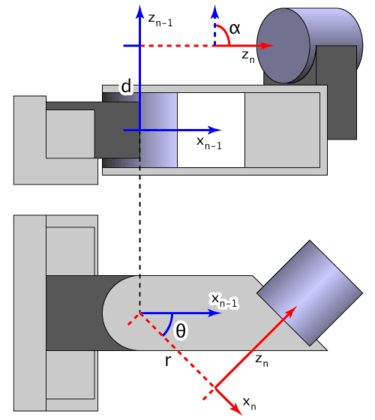
In summary, the reference frames are laid out as follows:
- the
 -axis is in the direction of the joint axis
-axis is in the direction of the joint axis - the
 -axis is parallel to the common normal:
-axis is parallel to the common normal: 
If there is no unique common normal (parallel axes), then  (below) is a free parameter. The direction of
(below) is a free parameter. The direction of  is from
is from  to
to  , as shown in the video below.
, as shown in the video below. - the
 -axis follows from the - and -axis by choosing it to be a right-handed coordinate system.
-axis follows from the - and -axis by choosing it to be a right-handed coordinate system.
Four parameters
 . With those four parameters, we can translate the coordinates from
. With those four parameters, we can translate the coordinates from  to
to  .
.The transformation the following four parameters known as D–H parameters:.[4]
-
 : offset along previous to the common normal
: offset along previous to the common normal -
 : angle about previous , from old to new
: angle about previous , from old to new -
 : length of the common normal (aka
: length of the common normal (aka  , but if using this notation, do not confuse with
, but if using this notation, do not confuse with  ). Assuming a revolute joint, this is the radius about previous .
). Assuming a revolute joint, this is the radius about previous . -
 : angle about common normal, from old axis to new axis
: angle about common normal, from old axis to new axis
A visualization of D–H parameterization is available: YouTube
There is some choice in frame layout as to whether the previous axis or the next points along the common normal. The latter system allows branching chains more efficiently, as multiple frames can all point away from their common ancestor, but in the alternative layout the ancestor can only point toward one successor. Thus the commonly used notation places each down-chain axis collinear with the common normal, yielding the transformation calculations shown below.
We can note constraints on the relationships between the axes:
- the -axis is perpendicular to both the and axes
- the -axis intersects both and axes
- the origin of joint
 is at the intersection of and
is at the intersection of and -
 completes a right-handed reference frame based on and
completes a right-handed reference frame based on and
Denavit-Hartenberg matrix
It is common to separate a screw displacement into the product of a pure translation along a line and a pure rotation about the line,[5][6] so that
![[Z_i] = \operatorname{Trans}_{Z_{i}}(d_i) \operatorname{Rot}_{Z_{i}}(\theta_i),](../I/m/71e1de2513825968a73a31682e0c76d0.png)
and
![[X_i]=\operatorname{Trans}_{X_i}(r_{i,i+1})\operatorname{Rot}_{X_i}(\alpha_{i,i+1}).](../I/m/94b3a450ea086a95509fcef1e97748f7.png)
Using this notation, each link can be described by a coordinate transformation from the previous coordinate system to the next coordinate system.

Note that this is the product of two screw displacements, The matrices associated with these operations are:
![\operatorname{Trans}_{z_{n - 1}}(d_n)
=
\left[
\begin{array}{ccc|c}
1 & 0 & 0 & 0 \\
0 & 1 & 0 & 0 \\
0 & 0 & 1 & d_n \\
\hline
0 & 0 & 0 & 1
\end{array}
\right]](../I/m/e0aac9d9f6780a1ff96eb01fdaf1fd90.png)
![\operatorname{Rot}_{z_{n - 1}}(\theta_n)
=
\left[
\begin{array}{ccc|c}
\cos\theta_n & -\sin\theta_n & 0 & 0 \\
\sin\theta_n & \cos\theta_n & 0 & 0 \\
0 & 0 & 1 & 0 \\
\hline
0 & 0 & 0 & 1
\end{array}
\right]](../I/m/d64d4260b225baa34fd360a22b1de597.png)
![\operatorname{Trans}_{x_n}(r_n)
=
\left[
\begin{array}{ccc|c}
1 & 0 & 0 & r_n \\
0 & 1 & 0 & 0 \\
0 & 0 & 1 & 0 \\
\hline
0 & 0 & 0 & 1
\end{array}
\right]](../I/m/03fb4023d941e3338e43efa557db106d.png)
![\operatorname{Rot}_{x_n}(\alpha_n)
=
\left[
\begin{array}{ccc|c}
1 & 0 & 0 & 0 \\
0 & \cos\alpha_n & -\sin\alpha_n & 0 \\
0 & \sin\alpha_n & \cos\alpha_n & 0 \\
\hline
0 & 0 & 0 & 1
\end{array}
\right]](../I/m/34e2694b4bc75e066d7b6794d3e1635e.png)
This gives:
![\operatorname{}^{n - 1}T_n
=
\left[
\begin{array}{ccc|c}
\cos\theta_n & -\sin\theta_n \cos\alpha_n & \sin\theta_n \sin\alpha_n & r_n \cos\theta_n \\
\sin\theta_n & \cos\theta_n \cos\alpha_n & -\cos\theta_n \sin\alpha_n & r_n \sin\theta_n \\
0 & \sin\alpha_n & \cos\alpha_n & d_n \\
\hline
0 & 0 & 0 & 1
\end{array}
\right]
=
\left[
\begin{array}{ccc|c}
& & & \\
& R & & T \\
& & & \\
\hline
0 & 0 & 0 & 1
\end{array}
\right]](../I/m/03a440458710f2906630cd26511d1777.png)
where R is the 3×3 submatrix describing rotation and T is the 3×1 submatrix describing translation.
Use of Denavit and Hartenberg matrices
The Denavit and Hartenberg notation gives a standard methodology to write the kinematic equations of a manipulator. This is specially useful for serial manipulators where a matrix is used to represent the pose (position and orientation) of one body with respect to another.
The position of body with respect to  may be represented by a position matrix indicated with the symbol
may be represented by a position matrix indicated with the symbol  or
or 

This matrix is also used to transform a point from frame to
![P_{(n-1)} = M_{n-1,n} P_{(n)} = \left[ \begin{array}{c} x_{n-1} \\y_{n-1} \\z_{n-1} \\ 1 \end{array} \right] = \left[ \begin{array}{ccc|c} X_x & Y_x & Z_x & T_x \\ X_y & Y_y & Z_y & T_y \\ X_z & Y_z & Z_z & T_z \\
\hline
0 & 0 & 0 & 1 \end{array}\right]
\left[ \begin{array}{c} x_{n} \\y_{n} \\z_{n} \\ 1 \end{array} \right]](../I/m/f645eb04a4944a47b3acb16801ce2e48.png)
Where the upper left  submatrix of represents the relative
orientation of the two bodies, and the upper right
submatrix of represents the relative
orientation of the two bodies, and the upper right  represents their relative position.
represents their relative position.
The position of body  with respect to body
with respect to body  can be obtained as the product of the matrices representing the pose of
can be obtained as the product of the matrices representing the pose of  with respect of and that of with respect of
with respect of and that of with respect of

An important property of Denavit and Hartenberg matrices is that the inverse is
![M^{-1} =
\left[
\begin{array}{ccc|c}
& & & \\
& R^T & & -R^T T \\
& & & \\
\hline
0 & 0 & 0 & 1
\end{array}
\right]](../I/m/6a4789404a71efb5c8738195bd16f14a.png)
where  is both the transpose and the inverse of the orthogonal matrix
is both the transpose and the inverse of the orthogonal matrix  , i.e.
, i.e.  .
.
Kinematics
Further matrices can be defined to represent velocity and acceleration of bodies.[5][6]
The velocity of body with respect to body can be represented in frame by the matrix
![W_{i,j(k)}=\left[ \begin{array}{ccc|c} 0 & -\omega_z & \omega_y & v_x \\ \omega_z & 0 & -\omega_x & v_y \\ -\omega_y & \omega_x & 0 & v_z \\
\hline
0 & 0 & 0 & 0 \end{array}\right]](../I/m/43e1eec26ece2124e10be09dd7200200.png)
where  is the angular velocity of body with respect to body and all the components are expressed in frame ;
is the angular velocity of body with respect to body and all the components are expressed in frame ;  is the velocity of one point of body with respect to body (the pole). The pole is the point of passing through the origin of frame .
is the velocity of one point of body with respect to body (the pole). The pole is the point of passing through the origin of frame .
The acceleration matrix can be defined as the sum of the time derivative of the velocity plus the velocity squared

The velocity and the acceleration in frame of a point of body can be evaluated as


It is also possible to prove that


Velocity and acceleration matrices add up according to the following rules


in other words the absolute velocity is the sum of the drag plus the relative velocity; for the acceleration the Coriolis' term is also present.
The components of velocity and acceleration matrices are expressed in an arbitrary frame and transform from one frame to another by the following rule


Dynamics
For the dynamics 3 further matrices are necessary to describe the inertia  , the linear and angular momentum
, the linear and angular momentum  , and the forces and torques
, and the forces and torques  applied to a body.
applied to a body.
Inertia :
![J=\left[ \begin{array}{ccc|c} I_{xx} & I_{xy} & I_{xz} & x_g m \\ I_{xy} & I_{yy} &
I_{yz} & y_g m \\ I_{xz} & I_{yz} & I_{zz} & z_g m \\
\hline
x_g m & y_g m & z_g m & m \end{array}\right]](../I/m/d6facb50a809696d52ec2150774a1ab2.png)
where  is the mass,
is the mass,  represent the position of the center of mass, and the terms
represent the position of the center of mass, and the terms  represent inertia and are defined as
represent inertia and are defined as


Action matrix , containing force  and torque
and torque  :
:
![\Phi = \left[ \begin{array}{ccc|c} 0 & -t_z & t_y & f_x \\ t_z & 0 & -t_x & f_y \\ -t_y & t_x & 0 & f_z \\
\hline
-f_x & -f_y & -f_z & 0 \end{array}\right]](../I/m/a1cc600838111e6d06dd7106da1c446b.png)
Momentum matrix , containing linear  and angular
and angular  momentum
momentum
![\Gamma = \left[ \begin{array}{ccc|c} 0 & -\gamma_z & \gamma_y & \rho_x \\ \gamma_z & 0 & -\gamma_x & \rho_y \\ -\gamma_y & \gamma_x & 0 & \rho_z \\
\hline
-\rho_x & -\rho_y & -\rho_z & 0 \end{array}\right]](../I/m/2f17aee6ac6d06fa7f848c0b8fd9465e.png)
All the matrices are represented with the vector components in a certain frame . Transformation of the components from frame to frame  follows to rule
follows to rule



The matrices described allow the writing of the dynamic equations in a concise way.
Newton's law:

Momentum:

The first of these equations express the Newton's law and is the equivalent of the vector equation  (force equal mass times acceleration) plus
(force equal mass times acceleration) plus  (angular acceleration in function of inertia and angular velocity); the second equation permits the evaluation of the linear and angular momentum when velocity and inertia are known.
(angular acceleration in function of inertia and angular velocity); the second equation permits the evaluation of the linear and angular momentum when velocity and inertia are known.
Modified DH parameters
Some books such as [7] use modified DH parameters. The difference between the classic DH parameters and the modified DH parameters are the locations of the coordinates system attachment to the links and the order of the performed transformations.
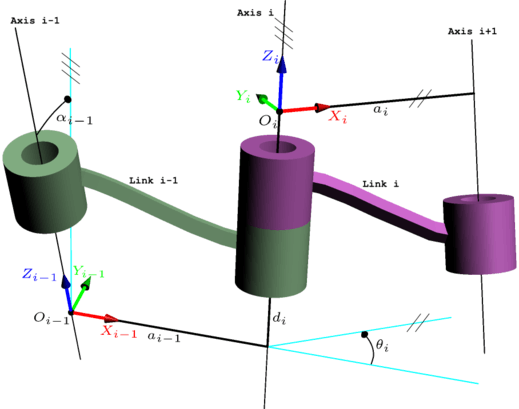
Compared with the classic DH parameters, the coordinates of frame  is put on axis i-1, not the axis i in classic DH convention. The coordinates of
is put on axis i-1, not the axis i in classic DH convention. The coordinates of  is put on the axis i, not the axis i+1 in classic DH convention.
is put on the axis i, not the axis i+1 in classic DH convention.
Another difference is that according to the modified convention, the transform matrix is given by the following order of operations:

Thus, the matrix of the modified DH parameters becomes
![\operatorname{}^{n - 1}T_n
=
\left[
\begin{array}{ccc|c}
\cos\theta_n & -\sin\theta_n & 0 & a_{n-1} \\
\sin\theta_n \cos\alpha_{n-1} & \cos\theta_n \cos\alpha_{n-1} & -\sin\alpha_{n-1} & -d_n \sin\alpha_{n-1} \\
\sin\theta_n\sin\alpha_{n-1} & \cos\theta_n \sin\alpha_{n-1} & \cos\alpha_{n-1} & d_n \cos\alpha_{n-1} \\
\hline
0 & 0 & 0 & 1
\end{array}
\right]](../I/m/40c2f09d3e89fa20259d33a6a7e2e210.png)
It should be noteworthy to remark that some books (e.g.:[8]) use  and
and  to indicate the length and twist of link n-1 rather than link n. As a consequence,
to indicate the length and twist of link n-1 rather than link n. As a consequence,  is formed only with parameters using the same subscript.
is formed only with parameters using the same subscript.
Surveys of DH conventions and its differences have been published.[9][10]
See also
- Forward kinematics
- Inverse kinematics
- Kinematic chain
- Kinematics
- Robotics conventions
- Mechanical systems
References
| Wikimedia Commons has media related to Denavit-Hartenberg transformation. |
- ↑ Denavit, Jacques; Hartenberg, Richard Scheunemann (1955). "A kinematic notation for lower-pair mechanisms based on matrices". Trans ASME J. Appl. Mech 23: 215–221.
- ↑ Hartenberg, Richard Scheunemann; Denavit, Jacques (1965). Kinematic synthesis of linkages. McGraw-Hill series in mechanical engineering. New York: McGraw-Hill. p. 435.
- ↑ Paul, Richard (1981). Robot manipulators: mathematics, programming, and control : the computer control of robot manipulators. Cambridge, MA: MIT Press. ISBN 978-0-262-16082-7.
- ↑ Spong, Mark W.; Vidyasagar, M. (1989). Robot Dynamics and Control. New York: John Wiley & Sons. ISBN 9780471503521.
- ↑ 5.0 5.1 Legnani, Giovanni; Casolo, Federico; Righettini, Paolo; Zappa, Bruno (1996). "A homogeneous matrix approach to 3D kinematics and dynamics — I. Theory". Mechanism and Machine Theory 31 (5): 573–587. doi:10.1016/0094-114X(95)00100-D.
- ↑ 6.0 6.1 Legnani, Giovanni; Casalo, Federico; Righettini, Paolo; Zappa, Bruno (1996). "A homogeneous matrix approach to 3D kinematics and dynamics—II. Applications to chains of rigid bodies and serial manipulators". Mechanism and Machine Theory 31 (5): 589–605. doi:10.1016/0094-114X(95)00101-4.
- ↑ John J. Craig, Introduction to Robotics: Mechanics and Control (3rd Edition)
- ↑ Khalil, Wisama; Dombre, Etienne (2002). Modeling, identification and control of robots. New York: Taylor Francis. ISBN 1-56032-983-1.
- ↑ Lipkin, Harvey (2005). "A Note on Denavit-Hartenberg Notation in Robotics" 2005. pp. 921–926. doi:10.1115/DETC2005-85460.
- ↑ Waldron, Kenneth; Schmiedeler, James (2008). "Kinematics". pp. 9–33. doi:10.1007/978-3-540-30301-5_2.