Barrier function
In constrained optimization, a field of mathematics, a barrier function is a continuous function whose value on a point increases to infinity as the point approaches the boundary of the feasible region (Nocedal and Wright 1999). It is used as a penalizing term for violations of constraints. The two most common types of barrier functions are inverse barrier functions and logarithmic barrier functions. Resumption of interest in logarithmic barrier functions was motivated by their connection with primal-dual interior point method.
When optimizing a function f(x), the variable  can be constrained to be strictly lower than some constant
can be constrained to be strictly lower than some constant  by instead optimizing the function
by instead optimizing the function  . Here,
. Here,  is the barrier function.
is the barrier function.
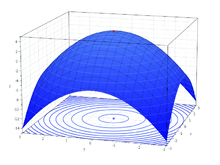
Logarithmic barrier function
For logarithmic barrier functions, is defined as  when
when  and
and  otherwise (in 1 dimension. See below for a definition in higher dimensions). This essentially relies on the fact that
otherwise (in 1 dimension. See below for a definition in higher dimensions). This essentially relies on the fact that  tends to negative infinity as
tends to negative infinity as  tends to 0.
tends to 0.
This introduces a gradient to the function being optimized which favors less extreme values of (in this case values lower than ), while having relatively low impact on the function away from these extremes.
Logarithmic barrier functions may be favored over less computationally expensive inverse barrier functions depending on the function being optimized.
Higher dimensions
Extending to higher dimensions is simple, provided each dimension is independent. For each variable  which should be limited to be strictly lower than
which should be limited to be strictly lower than  , add
, add  .
.
Formal definition
minimize :
subject to: 
assume strictly feasible:
define logarithmic barrier 
References
- Nocedal, Jorge; Stephen Wright (1999). Numerical Optimization. New York, NY: Springer. ISBN 0-387-98793-2.
- Lecture 14: Barrier method from Professor Lieven Vandenberghe of UCLA
| Wikimedia Commons has media related to Newton Method. |
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||