Backstepping
In control theory, backstepping is a technique developed circa 1990 by Petar V. Kokotovic and others[1][2] for designing stabilizing controls for a special class of nonlinear dynamical systems. These systems are built from subsystems that radiate out from an irreducible subsystem that can be stabilized using some other method. Because of this recursive structure, the designer can start the design process at the known-stable system and "back out" new controllers that progressively stabilize each outer subsystem. The process terminates when the final external control is reached. Hence, this process is known as backstepping.[3]
Backstepping approach
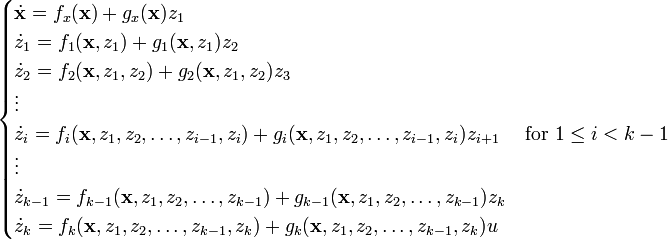
The backstepping approach provides a recursive method for stabilizing the origin of a system in strict-feedback form. That is, consider a system of the form[3]
where
-
 with
with  ,
, -
 are scalars,
are scalars, -
 is a scalar input to the system,
is a scalar input to the system, -
 vanish at the origin (i.e.,
vanish at the origin (i.e.,  ),
), -
 are nonzero over the domain of interest (i.e.,
are nonzero over the domain of interest (i.e.,  for
for  ).
).
Also assume that the subsystem

is stabilized to the origin (i.e.,  ) by some known control
) by some known control  such that
such that  . It is also assumed that a Lyapunov function
. It is also assumed that a Lyapunov function  for this stable subsystem is known. That is, this
for this stable subsystem is known. That is, this  subsystem is stabilized by some other method and backstepping extends its stability to the
subsystem is stabilized by some other method and backstepping extends its stability to the  shell around it.
shell around it.
In systems of this strict-feedback form around a stable subsystem,
- The backstepping-designed control input has its most immediate stabilizing impact on state
 .
. - The state then acts like a stabilizing control on the state
 before it.
before it. - This process continues so that each state
 is stabilized by the fictitious "control"
is stabilized by the fictitious "control"  .
.
The backstepping approach determines how to stabilize the subsystem using  , and then proceeds with determining how to make the next state
, and then proceeds with determining how to make the next state  drive to the control required to stabilize . Hence, the process "steps backward" from out of the strict-feedback form system until the ultimate control is designed.
drive to the control required to stabilize . Hence, the process "steps backward" from out of the strict-feedback form system until the ultimate control is designed.
Recursive Control Design Overview
- It is given that the smaller (i.e., lower-order) subsystem
- is already stabilized to the origin by some control where . That is, choice of
 to stabilize this system must occur using some other method. It is also assumed that a Lyapunov function for this stable subsystem is known. Backstepping provides a way to extend the controlled stability of this subsystem to the larger system.
to stabilize this system must occur using some other method. It is also assumed that a Lyapunov function for this stable subsystem is known. Backstepping provides a way to extend the controlled stability of this subsystem to the larger system.
- A control
 is designed so that the system
is designed so that the system
- is stabilized so that follows the desired control. The control design is based on the augmented Lyapunov function candidate
- The control
 can be picked to bound
can be picked to bound  away from zero.
away from zero.
- A control
 is designed so that the system
is designed so that the system
- is stabilized so that follows the desired control. The control design is based on the augmented Lyapunov function candidate
- The control
 can be picked to bound
can be picked to bound  away from zero.
away from zero.
- This process continues until the actual is known, and
- The real control stabilizes
 to fictitious control
to fictitious control  .
. - The fictitious control stabilizes
 to fictitious control
to fictitious control  .
. - The fictitious control stabilizes
 to fictitious control
to fictitious control  .
. - ...
- The fictitious control stabilizes to fictitious control .
- The fictitious control stabilizes to fictitious control .
- The fictitious control stabilizes to the origin.
- The real control




This process is known as backstepping because it starts with the requirements on some internal subsystem for stability and progressively steps back out of the system, maintaining stability at each step. Because
-
 vanish at the origin for
vanish at the origin for  ,
, -
 are nonzero for ,
are nonzero for , - the given control has ,
then the resulting system has an equilibrium at the origin (i.e., where ,  ,
,  , ...,
, ...,  , and
, and  ) that is globally asymptotically stable.
) that is globally asymptotically stable.
Integrator Backstepping
Before describing the backstepping procedure for general strict-feedback form dynamical systems, it is convenient to discuss the approach for a smaller class of strict-feedback form systems. These systems connect a series of integrators to the input of a system with a known feedback-stabilizing control law, and so the stabilizing approach is known as integrator backstepping. With a small modification, the integrator backstepping approach can be extended to handle all strict-feedback form systems.
Single-integrator Equilibrium
Consider the dynamical system

where and is a scalar. This system is a cascade connection of an integrator with the subsystem (i.e., the input enters an integrator, and the integral enters the subsystem).
We assume that  , and so if
, and so if  , and , then
, and , then

So the origin  is an equilibrium (i.e., a stationary point) of the system. If the system ever reaches the origin, it will remain there forever after.
is an equilibrium (i.e., a stationary point) of the system. If the system ever reaches the origin, it will remain there forever after.
Single-integrator Backstepping
In this example, backstepping is used to stabilize the single-integrator system in Equation (1) around its equilibrium at the origin. To be less precise, we wish to design a control law that ensures that the states  return to
return to  after the system is started from some arbitrary initial condition.
after the system is started from some arbitrary initial condition.
- First, by assumption, the subsystem

- with has a Lyapunov function
 such that
such that

- where
 is a positive-definite function. That is, we assume that we have already shown that this existing simpler subsystem is stable (in the sense of Lyapunov). Roughly speaking, this notion of stability means that:
is a positive-definite function. That is, we assume that we have already shown that this existing simpler subsystem is stable (in the sense of Lyapunov). Roughly speaking, this notion of stability means that:
- The function is like a "generalized energy" of the subsystem. As the states of the system move away from the origin, the energy
 also grows.
also grows. - By showing that over time, the energy
 decays to zero, then the states must decay toward . That is, the origin will be a stable equilibrium of the system – the states will continuously approach the origin as time increases.
decays to zero, then the states must decay toward . That is, the origin will be a stable equilibrium of the system – the states will continuously approach the origin as time increases. - Saying that is positive definite means that
 everywhere except for , and
everywhere except for , and  .
. - The statement that
 means that
means that  is bounded away from zero for all points except where . That is, so long as the system is not at its equilibrium at the origin, its "energy" will be decreasing.
is bounded away from zero for all points except where . That is, so long as the system is not at its equilibrium at the origin, its "energy" will be decreasing. - Because the energy is always decaying, then the system must be stable; its trajectories must approach the origin.
- The function
- Our task is to find a control that makes our cascaded system also stable. So we must find a new Lyapunov function candidate for this new system. That candidate will depend upon the control , and by choosing the control properly, we can ensure that it is decaying everywhere as well.
- Next, by adding and subtracting
 (i.e., we don't change the system in any way because we make no net effect) to the
(i.e., we don't change the system in any way because we make no net effect) to the  part of the larger system, it becomes
part of the larger system, it becomes

- which we can re-group to get

- So our cascaded supersystem encapsulates the known-stable
 subsystem plus some error perturbation generated by the integrator.
subsystem plus some error perturbation generated by the integrator.
- We now can change variables from to
 by letting
by letting  . So
. So

- Additionally, we let
 so that
so that  and
and

- We seek to stabilize this error system by feedback through the new control
 . By stabilizing the system at
. By stabilizing the system at  , the state will track the desired control which will result in stabilizing the inner subsystem.
, the state will track the desired control which will result in stabilizing the inner subsystem.
- From our existing Lyapunov function , we define the augmented Lyapunov function candidate
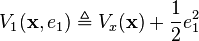
- So

- By distributing
 , we see that
, we see that

- To ensure that
 (i.e., to ensure stability of the supersystem), we pick the control law
(i.e., to ensure stability of the supersystem), we pick the control law
- with
 , and so
, and so

- After distributing the
 through,
through,

- So our candidate Lyapunov function
 is a true Lyapunov function, and our system is stable under this control law (which corresponds the control law because ). Using the variables from the original coordinate system, the equivalent Lyapunov function
is a true Lyapunov function, and our system is stable under this control law (which corresponds the control law because ). Using the variables from the original coordinate system, the equivalent Lyapunov function
- As discussed below, this Lyapunov function will be used again when this procedure is applied iteratively to multiple-integrator problem.


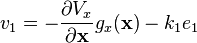
- Our choice of control ultimately depends on all of our original state variables. In particular, the actual feedback-stabilizing control law
- The states and and functions
 and
and  come from the system. The function comes from our known-stable subsystem. The gain parameter affects the convergence rate or our system. Under this control law, our system is stable at the origin .
come from the system. The function comes from our known-stable subsystem. The gain parameter affects the convergence rate or our system. Under this control law, our system is stable at the origin .


- Recall that in Equation (3) drives the input of an integrator that is connected to a subsystem that is feedback-stabilized by the control law . Not surprisingly, the control has a
 term that will be integrated to follow the stabilizing control law plus some offset. The other terms provide damping to remove that offset and any other perturbation effects that would be magnified by the integrator.
term that will be integrated to follow the stabilizing control law plus some offset. The other terms provide damping to remove that offset and any other perturbation effects that would be magnified by the integrator.
So because this system is feedback stabilized by and has Lyapunov function  with
with  , it can be used as the upper subsystem in another single-integrator cascade system.
, it can be used as the upper subsystem in another single-integrator cascade system.
Motivating Example: Two-integrator Backstepping
Before discussing the recursive procedure for the general multiple-integrator case, it is instructive to study the recursion present in the two-integrator case. That is, consider the dynamical system

where and and are scalars. This system is a cascade connection of the single-integrator system in Equation (1) with another integrator (i.e., the input enters through an integrator, and the output of that integrator enters the system in Equation (1) by its input).
By letting
-
 ,
, -
 ,
, -
then the two-integrator system in Equation (4) becomes the single-integrator system


By the single-integrator procedure, the control law  stabilizes the upper -to-
stabilizes the upper -to- subsystem using the Lyapunov function , and so Equation (5) is a new single-integrator system that is structurally equivalent to the single-integrator system in Equation (1). So a stabilizing control can be found using the same single-integrator procedure that was used to find .
subsystem using the Lyapunov function , and so Equation (5) is a new single-integrator system that is structurally equivalent to the single-integrator system in Equation (1). So a stabilizing control can be found using the same single-integrator procedure that was used to find .
Many-integrator backstepping
In the two-integrator case, the upper single-integrator subsystem was stabilized yielding a new single-integrator system that can be similarly stabilized. This recursive procedure can be extended to handle any finite number of integrators. This claim can be formally proved with mathematical induction. Here, a stabilized multiple-integrator system is built up from subsystems of already-stabilized multiple-integrator subsystems.
- First, consider the dynamical system
- that has scalar input and output states
![\mathbf{x} = [x_1, x_2, \ldots, x_n]^{\text{T}} \in \mathbb{R}^n](../I/m/33e05caa2932ad35425718834d29fb03.png) . Assume that
. Assume that

 so that the zero-input (i.e.,
so that the zero-input (i.e.,  ) system is stationary at the origin . In this case, the origin is called an equilibrium of the system.
) system is stationary at the origin . In this case, the origin is called an equilibrium of the system.- The feedback control law stabilizes the system at the equilibrium at the origin.
- A Lyapunov function corresponding to this system is described by .
- That is, if output states are fed back to the input by the control law , then the output states (and the Lyapunov function) return to the origin after a single perturbation (e.g., after a nonzero initial condition or a sharp disturbance). This subsystem is stabilized by feedback control law .
- Next, connect an integrator to input so that the augmented system has input (to the integrator) and output states . The resulting augmented dynamical system is
- This "cascade" system matches the form in Equation (1), and so the single-integrator backstepping procedure leads to the stabilizing control law in Equation (3). That is, if we feed back states and to input according to the control law
- with gain , then the states and will return to and after a single perturbation. This subsystem is stabilized by feedback control law , and the corresponding Lyapunov function from Equation (2) is
- That is, under feedback control law , the Lyapunov function decays to zero as the states return to the origin.

- Connect a new integrator to input so that the augmented system has input and output states . The resulting augmented dynamical system is
- which is equivalent to the single-integrator system
- Using these definitions of
 ,
,  , and
, and  , this system can also be expressed as
, this system can also be expressed as
- This system matches the single-integrator structure of Equation (1), and so the single-integrator backstepping procedure can be applied again. That is, if we feed back states , , and to input according to the control law
- with gain
 , then the states , , and will return to , , and after a single perturbation. This subsystem is stabilized by feedback control law , and the corresponding Lyapunov function is
, then the states , , and will return to , , and after a single perturbation. This subsystem is stabilized by feedback control law , and the corresponding Lyapunov function is
- That is, under feedback control law , the Lyapunov function
 decays to zero as the states return to the origin.
decays to zero as the states return to the origin.




- Connect an integrator to input so that the augmented system has input
 and output states . The resulting augmented dynamical system is
and output states . The resulting augmented dynamical system is
- which can be re-grouped as the single-integrator system
- By the definitions of , , and from the previous step, this system is also represented by
- Further, using these definitions of
 ,
,  , and
, and  , this system can also be expressed as
, this system can also be expressed as
- So the re-grouped system has the single-integrator structure of Equation (1), and so the single-integrator backstepping procedure can be applied again. That is, if we feed back states , ,
 , and to input according to the control law
, and to input according to the control law
- with gain
 , then the states , , , and will return to , ,
, then the states , , , and will return to , ,  , and after a single perturbation. This subsystem is stabilized by feedback control law , and the corresponding Lyapunov function is
, and after a single perturbation. This subsystem is stabilized by feedback control law , and the corresponding Lyapunov function is
- That is, under feedback control law , the Lyapunov function
 decays to zero as the states return to the origin.
decays to zero as the states return to the origin.
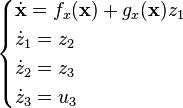





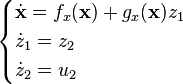
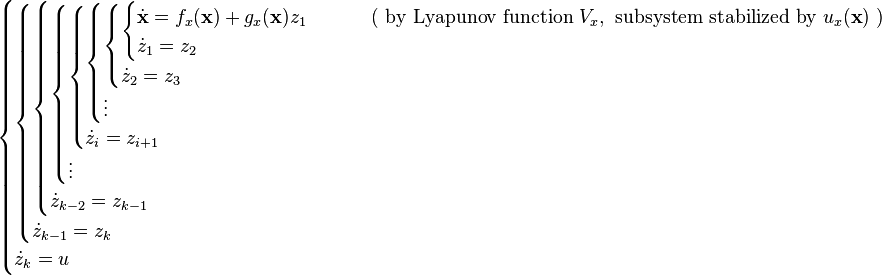
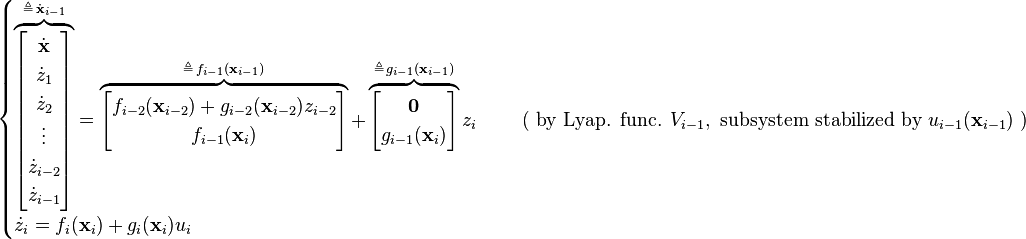
- This process can continue for each integrator added to the system, and hence any system of the form
- has the recursive structure
- and can be feedback stabilized by finding the feedback-stabilizing control and Lyapunov function for the single-integrator subsystem (i.e., with input and output ) and iterating out from that inner subsystem until the ultimate feedback-stabilizing control is known. At iteration
 , the equivalent system is
, the equivalent system is
- The corresponding feedback-stabilizing control law is
- with gain
 . The corresponding Lyapunov function is
. The corresponding Lyapunov function is
- By this construction, the ultimate control
 (i.e., ultimate control is found at final iteration
(i.e., ultimate control is found at final iteration  ).
).




Hence, any system in this special many-integrator strict-feedback form can be feedback stabilized using a straightforward procedure that can even be automated (e.g., as part of an adaptive control algorithm).
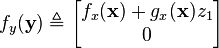
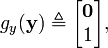
Generic Backstepping
Systems in the special strict-feedback form have a recursive structure similar to the many-integrator system structure. Likewise, they are stabilized by stabilizing the smallest cascaded system and then backstepping to the next cascaded system and repeating the procedure. So it is critical to develop a single-step procedure; that procedure can be recursively applied to cover the many-step case. Fortunately, due to the requirements on the functions in the strict-feedback form, each single-step system can be rendered by feedback to a single-integrator system, and that single-integrator system can be stabilized using methods discussed above.
Single-step Procedure
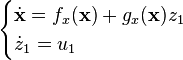
Consider the simple strict-feedback system
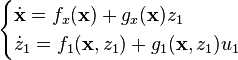

where
- ,
- and are scalars,
- For all and ,
 .
.
Rather than designing feedback-stabilizing control directly, introduce a new control  (to be designed later) and use control law
(to be designed later) and use control law

which is possible because  . So the system in Equation (6) is
. So the system in Equation (6) is
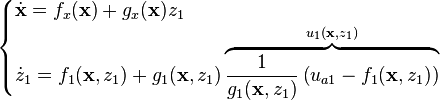
which simplifies to
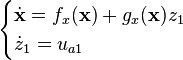
This new -to- system matches the single-integrator cascade system in Equation (1). Assuming that a feedback-stabilizing control law and Lyapunov function for the upper subsystem is known, the feedback-stabilizing control law from Equation (3) is

with gain . So the final feedback-stabilizing control law is


with gain . The corresponding Lyapunov function from Equation (2) is

Because this strict-feedback system has a feedback-stabilizing control and a corresponding Lyapunov function, it can be cascaded as part of a larger strict-feedback system, and this procedure can be repeated to find the surrounding feedback-stabilizing control.
Many-step Procedure
As in many-integrator backstepping, the single-step procedure can be completed iteratively to stabilize an entire strict-feedback system. In each step,
- The smallest "unstabilized" single-step strict-feedback system is isolated.
- Feedback is used to convert the system into a single-integrator system.
- The resulting single-integrator system is stabilized.
- The stabilized system is used as the upper system in the next step.
That is, any strict-feedback system
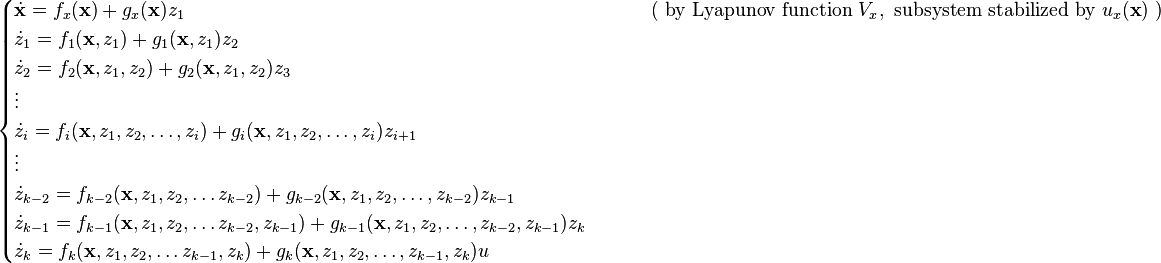
has the recursive structure
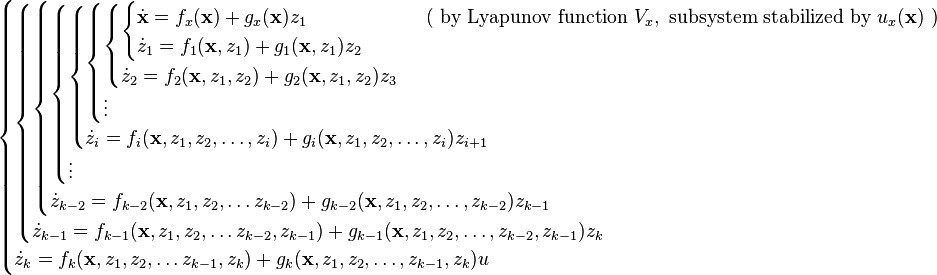
and can be feedback stabilized by finding the feedback-stabilizing control and Lyapunov function for the single-integrator subsystem (i.e., with input and output ) and iterating out from that inner subsystem until the ultimate feedback-stabilizing control is known. At iteration , the equivalent system is
By Equation (7), the corresponding feedback-stabilizing control law is

with gain . By Equation (8), the corresponding Lyapunov function is
By this construction, the ultimate control (i.e., ultimate control is found at final iteration ).
Hence, any strict-feedback system can be feedback stabilized using a straightforward procedure that can even be automated (e.g., as part of an adaptive control algorithm).
See also
References
- ↑ Kokotovic, P.V. (1992). "The joy of feedback: nonlinear and adaptive". Control Systems Magazine, IEEE 12 (3): 7–17. doi:10.1109/37.165507. Retrieved 2008-04-13.
- ↑ Lozano, R.; Brogliato, B. (1992). "Adaptive control of robot manipulators with flexible joints". IEEE Transactions on Automatic Control, 37 (2): 174–181. doi:10.1109/9.121619.
- ↑ 3.0 3.1 Khalil, H.K. (2002). Nonlinear Systems (3rd ed.). Upper Saddle River, NJ: Prentice Hall. ISBN 0-13-067389-7.