Whitehead manifold
In mathematics, the Whitehead manifold is an open 3-manifold that is contractible, but not homeomorphic to R3. Whitehead (1935) discovered this puzzling object while he was trying to prove the Poincaré conjecture, correcting an error in an earlier paper Whitehead (1934, theorem 3) where he incorrectly claimed that no such manifold exists.
A contractible manifold is one that can continuously be shrunk to a point inside the manifold itself. For example, an open ball is a contractible manifold. All manifolds homeomorphic to the ball are contractible, too. One can ask whether all contractible manifolds are homeomorphic to a ball. For dimensions 1 and 2, the answer is classical and it is "yes". In dimension 2, it follows, for example, from the Riemann mapping theorem. Dimension 3 presents the first counterexample: the Whitehead manifold.[1]
Construction
Take a copy of S3, the three-dimensional sphere. Now find a compact unknotted solid torus T1 inside the sphere. (A solid torus is an ordinary three-dimensional doughnut, i.e. a filled-in torus, which is topologically a circle times a disk.) The closed complement of the solid torus inside S3 is another solid torus.
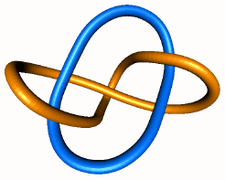
Now take a second solid torus T2 inside T1 so that T2 and a tubular neighborhood of the meridian curve of T1 is a thickened Whitehead link.
Note that T2 is null-homotopic in the complement of the meridian of T1. This can be seen by considering S3 as R3 ∪ ∞ and the meridian curve as the z-axis ∪ ∞. T2 has zero winding number around the z-axis. Thus the necessary null-homotopy follows. Since the Whitehead link is symmetric, i.e. a homeomorphism of the 3-sphere switches components, it is also true that the meridian of T1 is also null-homotopic in the complement of T2.
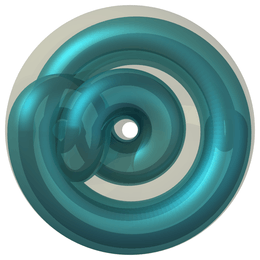
Now embed T3 inside T2 in the same way as T2 lies inside T1, and so on; to infinity. Define W, the Whitehead continuum, to be T∞, or more precisely the intersection of all the Tk for k = 1,2,3,….
The Whitehead manifold is defined as X =S3\W which is a non-compact manifold without boundary. It follows from our previous observation, the Hurewicz theorem, and Whitehead's theorem on homotopy equivalence, that X is contractible. In fact, a closer analysis involving a result of Morton Brown shows that X × R ≅ R4; however X is not homeomorphic to R3. The reason is that it is not simply connected at infinity.
The one point compactification of X is the space S3/W (with W crunched to a point). It is not a manifold. However (R3/W)×R is homeomorphic to R4.
Now we know that X is the union of two copies of R3 whose intersection is also homeomorphic to R3.
Related spaces
More examples of open, contractible 3-manifolds may be constructed by proceeding in similar fashion and picking different embeddings of Ti+1 in Ti in the iterative process. Each embedding should be an unknotted solid torus in the 3-sphere. The essential properties are that the meridian of Ti should be null-homotopic in the complement of Ti+1, and in addition the longitude of Ti+1 should not be null-homotopic in Ti − Ti+1. Another variation is to pick several subtori at each stage instead of just one. The cones over some of these continua appear as the complements of Casson handles in a 4-ball.
The dogbone space is not a manifold but its product with R1 is homeomorphic to R4.
References
- ↑ David Gabai, Journal of topology (September 2011). The Whitehead manifold is a union of two Euclidean spaces 4 (3). pp. 529–534.
- Kirby, Robion (1989). The topology of 4-manifolds. Lecture Notes in Mathematics, no. 1374, Springer-Verlag. ISBN 0-387-51148-2.
- Whitehead, J. H. C. (1934), "Certain theorems about three-dimensional manifolds (I)", Quarterly journal of mathematics 5 (1): 308–320, doi:10.1093/qmath/os-5.1.308
- Whitehead, J. H. C. (1935), "A certain open manifold whose group is unity", Quarterly journal of mathematics 6 (1): 268–279, doi:10.1093/qmath/os-6.1.268