Weight function
A weight function is a mathematical device used when performing a sum, integral, or average to give some elements more "weight" or influence on the result than other elements in the same set. They occur frequently in statistics and analysis, and are closely related to the concept of a measure. Weight functions can be employed in both discrete and continuous settings. They can be used to construct systems of calculus called "weighted calculus"[1] and "meta-calculus".[2]
Discrete weights
General definition
In the discrete setting, a weight function  is a positive function defined on a discrete set
is a positive function defined on a discrete set  , which is typically
finite or countable. The weight function
, which is typically
finite or countable. The weight function  corresponds to the unweighted situation in which all elements have equal weight. One can then apply this weight to various concepts.
corresponds to the unweighted situation in which all elements have equal weight. One can then apply this weight to various concepts.
If the function  is a real-valued function, then the unweighted sum of
is a real-valued function, then the unweighted sum of  on is defined as
on is defined as

but given a weight function , the weighted sum or conical combination is defined as

One common application of weighted sums arises in numerical integration.
If B is a finite subset of A, one can replace the unweighted cardinality |B| of B by the weighted cardinality

If A is a finite non-empty set, one can replace the unweighted mean or average

by the weighted mean or weighted average
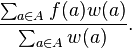
In this case only the relative weights are relevant.
Statistics
Weighted means are commonly used in statistics to compensate for the presence of bias. For a quantity measured multiple independent times  with variance
with variance  , the best estimate of the signal is obtained
by averaging all the measurements with weight
, the best estimate of the signal is obtained
by averaging all the measurements with weight  , and
the resulting variance is smaller than each of the independent measurements
, and
the resulting variance is smaller than each of the independent measurements
 . The Maximum likelihood method weights the difference between fit and data using the same weights
. The Maximum likelihood method weights the difference between fit and data using the same weights  .
.
Mechanics
The terminology weight function arises from mechanics: if one has a collection of  objects on a lever, with weights
objects on a lever, with weights  (where weight is now interpreted in the physical sense) and locations :
(where weight is now interpreted in the physical sense) and locations : , then the lever will be in balance if the fulcrum of the lever is at the center of mass
, then the lever will be in balance if the fulcrum of the lever is at the center of mass

which is also the weighted average of the positions  .
.
Continuous weights
In the continuous setting, a weight is a positive measure such as  on some domain
on some domain  ,which is typically a subset of a Euclidean space
,which is typically a subset of a Euclidean space  , for instance could be an interval
, for instance could be an interval ![[a,b]](/2014-wikipedia_en_all_02_2014/I/media/2/c/3/d/2c3d331bc98b44e71cb2aae9edadca7e.png) . Here
. Here  is Lebesgue measure and
is Lebesgue measure and  is a non-negative measurable function. In this context, the weight function
is a non-negative measurable function. In this context, the weight function  is sometimes referred to as a density.
is sometimes referred to as a density.
General definition
If  is a real-valued function, then the unweighted integral
is a real-valued function, then the unweighted integral

can be generalized to the weighted integral
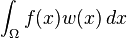
Note that one may need to require to be absolutely integrable with respect to the weight in order for this integral to be finite.
Weighted volume
If E is a subset of , then the volume vol(E) of E can be generalized to the weighted volume

Weighted average
If has finite non-zero weighted volume, then we can replace the unweighted average
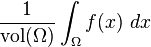
by the weighted average

Inner product
If  and
and  are two functions, one can generalize the unweighted inner product
are two functions, one can generalize the unweighted inner product

to a weighted inner product

See the entry on Orthogonality for more details.
See also
- Center of mass
- Numerical integration
- Orthogonality
- Weighted mean
- Kernel (statistics)
References
- ↑ Jane Grossman, Michael Grossman, Robert Katz. [http://books.google.com/books?as_brr=0&q=%22The+First+Systems+of+Weighted+Differential+and+Integral+Calculus%E2%80%8E%22&btnG=Search+Books,The First Systems of Weighted Differential and Integral Calculus], ISBN 0-9771170-1-4, 1980.
- ↑ Jane Grossman.[http://books.google.com/books?q=%22Non-Newtonian+Calculus%22&btnG=Search+Books&as_brr=0, Meta-Calculus: Differential and Integral], ISBN 0-9771170-2-2, 1981.