Underwater acoustic communication
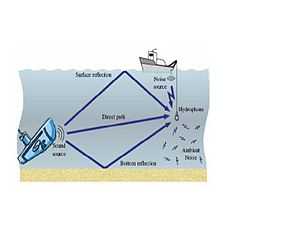
Underwater acoustic communication is a technique of sending and receiving message below water.[1] There are several ways of employing such communication but the most common is using hydrophones. Under water communication is difficult due to factors like multi-path propagation, time variations of the channel, small available bandwidth and strong signal attenuation, especially over long ranges. In underwater communication there are low data rates compared to terrestrial communication, since underwater communication uses acoustic waves instead of electromagnetic waves.
Use of vector sensor receivers
A vector sensor is capable of measuring important non-scalar components of the acoustic field such as the wave velocity, which cannot be obtained by a single scalar pressure sensor.
In recent decades, extensive research has been conducted on the theory and design of vector sensors.[2][3] Many vector sensor signal processing algorithms have been designed.[4] They have been mainly used for underwater target localization and SONAR applications.
Earlier underwater acoustic communication systems have been relying on scalar sensors only, which measure the pressure of the acoustic field. Vector sensors measure the scalar and vector components of the acoustic field in a single point in space, therefore can serve as a compact multichannel receiver. This is different from the existing multichannel underwater receivers,[5][6] which are composed of spatially separated pressure-only sensors, which may result in large-size arrays.
In general, there are two types of vector sensors: inertial and gradient.[7] Inertial sensors truly measure the velocity or acceleration by responding to the acoustic medium motion, whereas gradient sensors employ a finite-difference approximation to estimate the gradients of the acoustic field such as velocity and acceleration.
In the example of vector sensor communications shown, there is one transmitter pressure transducer, shown by a black dot, whereas for reception we use a vector sensor, shown by a black square, which measures the pressure and the y and z components of the velocity. This is a 1×3 single-input multiple-output (SIMO) system. With more pressure transmitters, one can have a multiple-input multiple-output (MIMO) system also.
See also
References
- ↑ I. F. Akyildiz, D. Pompili, and T. Melodia, "Underwater Acoustic Sensor Networks: Research Challenges," Ad Hoc Networks (Elsevier), vol. 3, no. 3, pp. 257-279, March 2005.
- ↑ Proc. AIP Conf. Acoustic Particle Velocity Sensors: Design, Performance, and Applications, Mystic, CT, 1995.
- ↑ A. Nehorai and E. Paldi, “Acoustic vector-sensor array processing,” IEEE Trans. Signal Processing, vol. 42, pp. 2481-2491, 1994.
- ↑ K. T. Wong & H. Chi, "Beam Patterns of an Underwater Acoustic Vector Hydrophone Located Away from any Reflecting Boundary," IEEE Journal of Oceanic Engineering, vol. 27, no. 3, pp. 628-637, July 2002.
- ↑ T. C. Yang, “Temporal resolutions of time-reversal and passive phase conjugation for underwater acoustic communications,” IEEE J. Oceanic Eng., vol. 28, pp. 229–245, 2003.
- ↑ M. Stojanovic, J. A. Catipovic, and J. G. Proakis, “Reduced-complexity spatial and temporal processing of underwater acoustic communication signals,” J. Acoust. Soc. Am., vol. 98, pp. 961–972, 1995.
- ↑ T. B. Gabrielson, “Design problems and limitations in vector sensors,” in Proc. workshop Directional Acoustic Sensors (CD-ROM), New Port, RI, 2001.
