Relative velocity
| Classical mechanics |
|---|
|
Fundamental concepts |
|
Core topics |
The relative velocity  (also
(also  or
or  ) is the velocity of an object or observer B in the rest frame of another object or observer A, if it is constant,
) is the velocity of an object or observer B in the rest frame of another object or observer A, if it is constant,

where  is A's velocity in the rest frame of B.
is A's velocity in the rest frame of B.
Classical mechanics
In one dimension (non-relativistic)

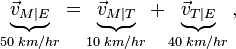
We begin with relative motion in the classical, (or non-relativistic, or the Newtonian approximation) that all speeds are much less than the speed of light. This limit is associated with the Galilean transformation. The figure shows a man on top of a train, at the back edge. At 1:00 pm he begins to walk forward at a walking speed of 10 km/hr (kilometers per hour). The train is moving at 40 km/hr. The figure depicts the man and train at two different times: first, when the journey began, and also one hour later at 2:00 pm. The figure suggests that the man is 50 km from the starting point after having traveled (by walking and by train) for one hour. This, by definition, is 50 km/hour, which suggests that the prescription for calculating relative velocity in this fashion is to add the two velocities.
The figure displays clocks and rulers to remind the reader that while the logic behind this calculation seem flawless, it makes false assumptions about how clocks and rulers behave. (See The train-and-platform thought experiment.) To recognize that this classical model of relative motion violates special relativity, we generalize the example into an equation:
- where:
 is the velocity of the Man relative to Earth.
is the velocity of the Man relative to Earth. is the velocity of the Man relative to the Train.
is the velocity of the Man relative to the Train. is the velocity of the Train relative to Earth.
is the velocity of the Train relative to Earth.
Fully legitimate expressions for "the velocity of A relative to B" include "the velocity of A with respect to B" and "the velocity of A in the coordinate system where B is always at rest". The violation of special relativity occurs because this equation for relative velocity falsely predicts that different observers will measure different speeds when observing the motion of light. [note 1]
In two dimensions (non-relativistic)

The figure shows two objects (A and B) moving at constant velocity. The equations of motion are:

 ,
,
where the subscript i refers to the initial displacement (at time t equal to zero). The difference between the two displacement vectors,  , represents the location of B as seen from A.
, represents the location of B as seen from A.

Hence:

After making the substitutions,
 and
and
 ,
we have:
,
we have:


Though easy to learn, this notation is unfortunately a bit too cumbersome for lengthy calculations.
Galilean transformation (non-relativistic)
To construct a theory of relative motion consistent with the theory of special relativity, we must adopt a different convention. Continuing to work in the (non-relativistic) Newtonian limit we begin with a Galilean transformation in one dimension:[note 2]


where x' is the position as seen by a reference frame that is moving at speed, v, in the "unprimed" (x) reference frame.[note 3] Taking the differential of the first of the two equations above, we have,  , and what may to be the obvious[note 4] fact that
, and what may to be the obvious[note 4] fact that  , we have:
, we have:
To recover the previous expressions for relative velocity, we assume that particle A is following the path defined by dx/dt in the unprimed reference (and hence dx'/dt' in the primed frame). Thus  and
and  , where
, where  and
and  refer to motion of A as seen by an observer in the unprimed and primed frame, respectively. Recall that v is the motion of a stationary object in the primed frame, as seen from the unprimed frame. Thus we have
refer to motion of A as seen by an observer in the unprimed and primed frame, respectively. Recall that v is the motion of a stationary object in the primed frame, as seen from the unprimed frame. Thus we have  , and:
, and:
 ,
,
where the latter form has the desired (easily learned) symmetry.
Extension to special relativity
Following , we may extend this result to relativistic speeds using the Lorentz transformation:[note 5]

 ,
,
where the Lorentz factor is:
![\gamma ={\frac {1}{{\sqrt[ {}]{1-{\frac {v^{2}}{c^{2}}}}}}}](/2014-wikipedia_en_all_02_2014/I/media/d/a/8/0/da805e65f4b0b62886ff31131814bda7.png) .
.
The Lorentz transformation remains valid in differential form for a constant velocity :


Where we have defined  and
and  . Taking the ratio, we have:
. Taking the ratio, we have:
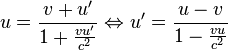
where, , is the velocity as measured in the unprimed reference frame, and
, is the velocity as measured in the unprimed reference frame, and  is the corresponding velocity in the primed reference frame. The equivalence between the two formulas above can be established algebraically by solving for u'.
is the corresponding velocity in the primed reference frame. The equivalence between the two formulas above can be established algebraically by solving for u'.
Although the notation that began this discussion was more troublesome, it facilitates the memorization of the velocity addition formula in the relativistic limit. Recall that O and O' denote unprimed and primed observers, respectively. Also,  ,
,  , and
, and  . As is customary in relativistic calculation, we set c=1 and write:
. As is customary in relativistic calculation, we set c=1 and write:

See also:
- Special relativity - Composition of velocities (Wikipedia)
- Velocity-addition formula (Wikipedia)
- Wikiversity Special Relativity (Wikiversity)
Special relativity theory
According to SR, the vacuum speed of light is isotropically equal to a universal constant c in any coordinate systems. Inter alia, it leads to the fact that
- apart from Newtonian limit, velocities are not additive quantities, and
- the difference velocity between A and B is not equal to their relative velocity and particularly has a smaller absolute value. Whereas the maximum difference speed between two objects is 2c, the maximum absolute value of a relative velocity is equal to c.
To get from  and
and  in an arbitrary reference frame, it's necessary to Lorentz transformation the latter into the rest frame of A. If and are collinear, the formula
in an arbitrary reference frame, it's necessary to Lorentz transformation the latter into the rest frame of A. If and are collinear, the formula
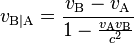
holds.
Appendix
Rotating reference frames (nonrelativistic)
Suppose there is a reference frame A rotating with an angular velocity vector ω, and having a translational velocity vector of V with respect to the ground, and there is a different body B whose translational velocity vector is U with respect to A, then the velocity vector of B with respect to the ground is given as
Ú = V + U(considering ω = 0) + (ω x R)
where R is the position vector of B with respect to A.
Acceleration vector of B with respect to ground ...
a = d/dt(V) + {d/dt(U) (considering ω =0)} + R x d/dt(ω) + ω x (ω x R) + 2ω x U
Example
Joe and Sara are driving in the same direction. Joe’s velocity is 90 km/h and Sara’s 110 km/h. If we take Joe’s velocity as
 and Sara’s
and Sara’s  then, classically,
then, classically,

This is the velocity observed by Joe. Joe sees Sara moving at 20 km/h.
If special relativity is taken into account, then Joe sees Sara moving at approximately 20.00000000000017 km/h.
Now suppose Joe and Sara are driving in the opposite directions i.e. heading towards each other or moving away from each other. Joe’s velocity is 90 km/h and Sara’s 100 km/h. If we take Joe’s velocity as
and Sara’s then, classically,

Note that in this case Joe's velocity is negative, as its direction is opposite Sara's velocity. Therefore...

This is the velocity observed by Joe. Joe sees Sara moving at 190 km/h.
Notes
- ↑ For example, replace the "Man" by a photon traveling at the speed of light.
- ↑ This result is valid if all motion is restricted to the x-axis, but can be easily generalized by replacing the first equation by

- ↑ It is easy to be confused about the minus sign before v, or whether v is defined in the prime or unprimed reference frame. It might help to visualize the fact that if x=vt, then x'=0, meaning that a particle that is following the path x=vt is at rest in the primed reference frame.
- ↑ Keep in mind that this non-relativistic calculation does not correspond to physical reality.
- ↑ To connect with the aforementioned Galilean transformation, inverse Lorentz transformation is:
 ,
, 
References
- Alonso & Finn, Fundamental University Physics ISBN 10:0-201-56518-8
- Greenwood, Donald T, Principles of Dynamics.
- Goodman and Warner, Dynamics.
- Beer and Johnston, Statics and Dynamics.
- McGraw Hill Dictionary of Physics and Mathematics.
- Rindler, W., Essential Relativity.
- KHURMI R.S., Mechanics, Engineering Mechanics, Statics, Dynamics
External links
- Relative Motion at HyperPhysics
- A Java applet illustrating Relative Velocity, by Andrew Duffy
- Relatív mozgás (1)...(3) Relative motion of two train (1)...(3). Videos on the portal FizKapu. (Hungarian)
- Sebességek összegzése Relative tranquility of trout in creek. Video on the portal FizKapu. (Hungarian)