Pendulum (mathematics)
| Classical mechanics |
|---|
|
Fundamental concepts |
|
Core topics |
The mathematics of pendulums are in general quite complicated. Simplifying assumptions can be made, which in the case of a simple pendulum allows the equations of motion to be solved analytically for small-angle oscillations.
Simple gravity pendulum

PLEASE NOTE:
The acceleration vector

is related to
the gravitational vector:
... where
m is the bob mass
M is the Earth mass M⊕
r is the Earth radius
and
G is the Gravitational constant in Standard gravity.
A so-called "simple pendulum" is an idealization of a "real pendulum" but in an isolated system using the following assumptions:
- The rod or cord on which the bob swings is massless, inextensible and always remains taut;
- The bob is a point mass;
- Motion occurs only in two dimensions, i.e. the bob does not trace an ellipse but an arc.
- The motion does not lose energy to friction or air resistance.
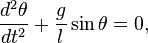
The differential equation which represents the motion of a simple pendulum is
-
(Eq. 1)
where  is acceleration due to gravity,
is acceleration due to gravity,  is the length of the pendulum, and
is the length of the pendulum, and  is the angular displacement.
is the angular displacement.
|
"Force" derivation of (Eq. 1)
 Figure 1. Force diagram of a simple gravity pendulum. Please take the time to consider Figure 1 on the right, showing the forces acting on a simple pendulum. Note that the path of the pendulum sweeps out an arc of a circle. The angle where F is the sum of forces on the object, m is mass, and a is the acceleration. Because we are only concerned with changes in speed, and because the bob is forced to stay in a circular path, we apply Newton's equation to the tangential axis only. The short violet arrow represents the component of the gravitational force in the tangential axis, and trigonometry can be used to determine its magnitude. Thus, where
This linear acceleration thus: |



 always point in opposite directions. This makes sense because when a pendulum swings further to the left, we would expect it to accelerate back toward the right.
always point in opposite directions. This makes sense because when a pendulum swings further to the left, we would expect it to accelerate back toward the right. is arc length:
is arc length:

|
"Torque" derivation of (Eq. 1)
Equation (1) can be obtained using two definitions for torque. First start by defining the torque on the pendulum bob using the force due to gravity. where For now just consider the magnitude of the torque on the pendulum. where Next rewrite the angular momentum.
Again just consider the magnitude of the angular momentum.
and is time derivative
According to
thus: which is the same result as obtained through force analysis. |

 is the length vector of the pendulum and
is the length vector of the pendulum and  is the force due to gravity.
is the force due to gravity.
 is the mass of the pendulum,
is the mass of the pendulum,  is the length of the pendulum
and
is the length of the pendulum
and  .
. .
. ,
, , we can get by comparing the magnitudes
, we can get by comparing the magnitudes ,
,
|
"Energy" derivation of (Eq. 1)
 Figure 2. Trigonometry of a simple gravity pendulum. It can also be obtained via the conservation of mechanical energy principle: any object falling a vertical distance change in kinetic energy (body started from rest) is given by Since no energy is lost, those two must be equal Using the arc length formula above, this equation can be rewritten in favor of
similarly, for then in terms of
This equation is known as the first integral of motion, it gives the velocity in terms of the location and includes an integration constant related to the initial displacement ( which is the same result as obtained through force analysis. |
 would acquire
would acquire 


 , then
, then  , the vertical distance from the screw, is given by
, the vertical distance from the screw, is given by
 , we have
, we have



Small-angle approximation
The differential equation given above is not easily solved, and there is no solution that can be written in terms of elementary functions. However adding a restriction to the size of the oscillation's amplitude gives a form whose solution can be easily obtained. If it is assumed that the angle is much less than 1 radian, or
 ,
,
then substituting for sin θ into Eq. 1 using the small-angle approximation,
 ,
,
yields the equation for a harmonic oscillator,

The error due to the approximation is of order θ 3 (from the Maclaurin series for sin θ).
Given the initial conditions θ(0) = θ0 and dθ/dt(0) = 0, the solution becomes,

The motion is simple harmonic motion where θ0 is the semi-amplitude of the oscillation (that is, the maximum angle between the rod of the pendulum and the vertical). The period of the motion, the time for a complete oscillation (outward and return) is

which is known as Christiaan Huygens's law for the period. Note that under the small-angle approximation, the period is independent of the amplitude θ0; this is the property of isochronism that Galileo discovered.
Rule of thumb for pendulum length
 can be expressed as
can be expressed as 
If SI units are used (i.e. measure in metres and seconds), and assuming the measurement is taking place on the Earth's surface, then  m/s2, and
m/s2, and  (0.994 is the approximation to 3 decimal places).
(0.994 is the approximation to 3 decimal places).
Therefore a relatively reasonable approximation for the length and period are,


Arbitrary-amplitude period
For amplitudes beyond the small angle approximation, one can compute the exact period by first inverting the equation for the angular velocity obtained from the energy method (Eq. 2),


and then integrating over one complete cycle,

or twice the half-cycle

or 4 times the quarter-cycle

which leads to

This integral can be re-written in terms of elliptic integrals as
where  is the incomplete elliptic integral of the first kind defined by
is the incomplete elliptic integral of the first kind defined by

Or more concisely by the substitution  expressing in terms of
expressing in terms of  ,
,
-
(Eq. 3)
where  is the complete elliptic integral of the first kind defined by
is the complete elliptic integral of the first kind defined by

For comparison of the approximation to the full solution, consider the period of a pendulum of length 1 m on Earth (g = 9.80665 m/s2) at initial angle 10 degrees is  . The linear approximation gives
. The linear approximation gives  . The difference between the two values, less than 0.2%, is much less than that caused by the variation of g with geographical location.
. The difference between the two values, less than 0.2%, is much less than that caused by the variation of g with geographical location.
From here there are many ways to proceed to calculate the elliptic integral:
Legendre polynomial solution for the elliptic integral
Given Eq. 3 and the Legendre polynomial solution for the elliptic integral:
![K(k)={\frac {\pi }{2}}\left\{1+\left({\frac {1}{2}}\right)^{2}k^{{2}}+\left({\frac {1\cdot 3}{2\cdot 4}}\right)^{2}k^{{4}}+\cdots +\left[{\frac {\left(2n-1\right)!!}{\left(2n\right)!!}}\right]^{2}k^{{2n}}+\cdots \right\},](/2014-wikipedia_en_all_02_2014/I/media/c/d/7/5/cd750028aa08b03f6d5fda88f98d6d5c.png)
where n!! denotes the double factorial, an exact solution to the period of a pendulum is:
![{\begin{alignedat}{2}T&=2\pi {\sqrt {\ell \over g}}\left(1+\left({\frac {1}{2}}\right)^{2}\sin ^{2}\left({\frac {\theta _{0}}{2}}\right)+\left({\frac {1\cdot 3}{2\cdot 4}}\right)^{2}\sin ^{4}\left({\frac {\theta _{0}}{2}}\right)+\left({\frac {1\cdot 3\cdot 5}{2\cdot 4\cdot 6}}\right)^{2}\sin ^{6}\left({\frac {\theta _{0}}{2}}\right)+\cdots \right)\\&=2\pi {\sqrt {\ell \over g}}\cdot \sum _{{n=0}}^{\infty }\left[\left({\frac {(2n)!}{(2^{n}\cdot n!)^{2}}}\right)^{2}\cdot \sin ^{{2n}}\left({\frac {\theta _{0}}{2}}\right)\right].\end{alignedat}}](/2014-wikipedia_en_all_02_2014/I/media/6/4/c/d/64cd3db46ef18d401109423e81cdf6ce.png)
Figure 4 shows the relative errors using the power series. T0 is the linear approximation, and T2 to T10 include respectively the terms up to the 2nd to the 10th powers.

Power series solution for the elliptic integral
Another formulation of the above solution can be found if the following Maclaurin series:

is used in the Legendre polynomial solution above. The resulting power series is:[1]

Arithmetic-geometric mean solution for elliptic integral
Given Eq. 3 and the Arithmetic-geometric mean solution of the elliptic integral:

where  is the arithmetic-geometric mean of
is the arithmetic-geometric mean of  and
and  .
.
This yields an alternative and faster-converging formula for the period:[2]

Examples
The animations below depict several different modes of oscillation given different initial conditions. The small graph above the pendulums are their phase portraits.
-

Initial angle of 0°, a stable equilibrium.
-

Initial angle of 45°
-

Initial angle of 90°
-
Initial angle of 135°
-

Initial angle of 170°
-

Pendulum with just barely enough energy for a full swing
-
Pendulum with enough energy for a full swing
-

Initial angle of 180°, unstable equilibrium.
Compound pendulum
A compound pendulum (or physical pendulum) is one where the rod is not massless, and may have extended size; that is, an arbitrarily shaped rigid body swinging by a pivot. In this case the pendulum's period depends on its moment of inertia I around the pivot point.
The equation of torque gives:

where:
 is the angular acceleration.
is the angular acceleration. is the torque
is the torque
The torque is generated by gravity so:

where:
- L is the distance from the pivot to the center of mass of the pendulum
- θ is the angle from the vertical
Hence, under the small-angle approximation  ,
,
This is of the same form as the conventional simple pendulum and this gives a period of:
And a frequency of:

Physical interpretation of the imaginary period
The Jacobian elliptic function that expresses the position of a pendulum as a function of time is a doubly periodic function with a real period and an imaginary period. The real period is of course the time it takes the pendulum to go through one full cycle. Paul Appell pointed out a physical interpretation of the imaginary period:[4] if θ0 is the maximum angle of one pendulum and 180° − θ0 is the maximum angle of another, then the real period of each is the magnitude of the imaginary period of the other. This interpretation, involving dual forces in opposite directions, might be further clarified and generalized to other classical problems in mechanics with dual solutions.[5]
See also
- Blackburn pendulum
- Conical pendulum
- Double pendulum
- Inverted pendulum
- Spring pendulum
- Mathieu function
- Pendulum equations (software)
References
- ↑ Nelson, Robert; M. G. Olsson (February 1986). "The pendulum — Rich physics from a simple system". American Journal of Physics 54 (2): pp. 112–121. doi:10.1119/1.14703. Retrieved 2012-04-30.
- ↑ Carvalhaes, Claudio G.; Suppes, Patrick (December 2008), "Approximations for the period of the simple pendulum based on the arithmetic-geometric mean", Am. J. Phys. 76 (12͒): 1150–1154, doi:10.1119/1.2968864͔, ISSN 0002-9505, retrieved 2013-12-14
- ↑ Physical Pendulum
- ↑ Paul Appell, "Sur une interprétation des valeurs imaginaires du temps en Mécanique", Comptes Rendus Hebdomadaires des Scéances de l'Académie des Sciences, volume 87, number 1, July, 1878
- ↑ Adlaj, S. Mechanical interpretation of negative and imaginary tension of a tether in a linear parallel force field , Selected papers of the International Scientific Conference on Mechanics "SIXTH POLYAKHOV READINGS", January 31 - February 3, 2012, Saint-Petersburg, Russia, pp. 13-18.
Further reading
- Baker, Gregory L.; Blackburn, James A. (2005). The Pendulum: A Physics Case Study. Oxford University Press.
- Ochs, Karlheinz (2011). "A comprehensive analytical solution of the nonlinear pendulum". European Journal of Physics 32 (2): 479–490. doi:10.1088/0143-0807/32/2/019.
- Sala, Kenneth L. (1989). "Transformations of the Jacobian Amplitude Function and its Calculation via the Arithmetic-Geometric Mean". SIAM J. Math. Anal. 20 (6): 1514–1528. doi:10.1137/0520100.