Nash equilibrium
| Nash Equilibrium | |
|---|---|
| A solution concept in game theory | |
| Relationships | |
| Subset of | Rationalizability, Epsilon-equilibrium, Correlated equilibrium |
| Superset of | Evolutionarily stable strategy, Subgame perfect equilibrium, Perfect Bayesian equilibrium, Trembling hand perfect equilibrium, Stable Nash equilibrium, Strong Nash equilibrium |
| Significance | |
| Proposed by | John Forbes Nash |
| Used for | All non-cooperative games |
| Example | Rock paper scissors |
In game theory, the Nash equilibrium is a solution concept of a non-cooperative game involving two or more players, in which each player is assumed to know the equilibrium strategies of the other players, and no player has anything to gain by changing only their own strategy.[1]:14 If each player has chosen a strategy and no player can benefit by changing strategies while the other players keep theirs unchanged, then the current set of strategy choices and the corresponding payoffs constitute a Nash equilibrium.
Stated simply, Amy and Wili are in Nash equilibrium if Amy is making the best decision she can, taking into account Wili's decision, and Wili is making the best decision he can, taking into account Amy's decision. Likewise, a group of players are in Nash equilibrium if each one is making the best decision that he or she can, taking into account the decisions of the others.
Applications
Game theorists use the Nash equilibrium concept to analyze the outcome of the strategic interaction of several decision makers. In other words, it provides a way of predicting what will happen if several people or several institutions are making decisions at the same time, and if the outcome depends on the decisions of the others. The simple insight underlying John Nash's idea is that one cannot predict the result of the choices of multiple decision makers if one analyzes those decisions in isolation. Instead, one must ask what each player would do, taking into account the decision-making of the others.
Nash equilibrium has been used to analyze hostile situations like war and arms races[2] (see prisoner's dilemma), and also how conflict may be mitigated by repeated interaction (see tit-for-tat). It has also been used to study to what extent people with different preferences can cooperate (see battle of the sexes), and whether they will take risks to achieve a cooperative outcome (see stag hunt). It has been used to study the adoption of technical standards[citation needed], and also the occurrence of bank runs and currency crises (see coordination game). Other applications include traffic flow (see Wardrop's principle), how to organize auctions (see auction theory), the outcome of efforts exerted by multiple parties in the education process,[3] regulatory legislation such as environmental regulations (see tragedy of the Commons),[4] and even penalty kicks in soccer (see matching pennies).[5]
History
The Nash equilibrium was named after John Forbes Nash, Jr. A version of the Nash equilibrium concept was first known to be used in 1838 by Antoine Augustin Cournot in his theory of oligopoly.[6] In Cournot's theory firms choose how much output to produce to maximize their own profit. However, the best output for one firm depends on the outputs of others. A Cournot equilibrium occurs when each firm's output maximizes its profits given the output of the other firms, which is a pure strategy Nash Equilibrium. Cournot also introduced the concept of best response dynamics in his analysis of the stability of equilibrium.
The modern game-theoretic concept of Nash Equilibrium is instead defined in terms of mixed strategies, where players choose a probability distribution over possible actions. The concept of the mixed strategy Nash Equilibrium was introduced by John von Neumann and Oskar Morgenstern in their 1944 book The Theory of Games and Economic Behavior. However, their analysis was restricted to the special case of zero-sum games. They showed that a mixed-strategy Nash Equilibrium will exist for any zero-sum game with a finite set of actions. [7] The contribution of John Forbes Nash, Jr. in his 1951 article Non-Cooperative Games was to define a mixed strategy Nash Equilibrium for any game with a finite set of actions and prove that at least one (mixed strategy) Nash Equilibrium must exist in such a game.
Since the development of the Nash equilibrium concept, game theorists have discovered that it makes misleading predictions (or fails to make a unique prediction) in certain circumstances. Therefore they have proposed many related solution concepts (also called 'refinements' of Nash equilibrium) designed to overcome perceived flaws in the Nash concept. One particularly important issue is that some Nash equilibria may be based on threats that are not 'credible'. Therefore, in 1965 Reinhard Selten proposed subgame perfect equilibrium as a refinement that eliminates equilibria which depend on non-credible threats. Other extensions of the Nash equilibrium concept have addressed what happens if a game is repeated, or what happens if a game is played in the absence of perfect information. However, subsequent refinements and extensions of the Nash equilibrium concept share the main insight on which Nash's concept rests: all equilibrium concepts analyze what choices will be made when each player takes into account the decision-making of others.
Definitions
Informal definition
Informally, a set of strategies is a Nash equilibrium if no player can do better by unilaterally changing his or her strategy. To see what this means, imagine that each player is told the strategies of the others. Suppose then that each player asks himself or herself: "Knowing the strategies of the other players, and treating the strategies of the other players as set in stone, can I benefit by changing my strategy?"
If any player would answer "Yes", then that set of strategies is not a Nash equilibrium. But if every player prefers not to switch (or is indifferent between switching and not) then the set of strategies is a Nash equilibrium. Thus, each strategy in a Nash equilibrium is a best response to all other strategies in that equilibrium.[8]
The Nash equilibrium may sometimes appear non-rational in a third-person perspective. This is because it may happen that a Nash equilibrium is not Pareto optimal.
The Nash equilibrium may also have non-rational consequences in sequential games because players may "threaten" each other with non-rational moves. For such games the subgame perfect Nash equilibrium may be more meaningful as a tool of analysis.
Formal definition
Let  be a game with
be a game with  players, where
players, where  is the strategy set for player
is the strategy set for player  ,
,  is the set of strategy profiles and
is the set of strategy profiles and  is the payoff function for
is the payoff function for  . Let
. Let  be a strategy profile of player and
be a strategy profile of player and  be a strategy profile of all players except for player . When each player
be a strategy profile of all players except for player . When each player  chooses strategy resulting in strategy profile
chooses strategy resulting in strategy profile  then player obtains payoff
then player obtains payoff  . Note that the payoff depends on the strategy profile chosen, i.e., on the strategy chosen by player as well as the strategies chosen by all the other players. A strategy profile
. Note that the payoff depends on the strategy profile chosen, i.e., on the strategy chosen by player as well as the strategies chosen by all the other players. A strategy profile  is a Nash equilibrium (NE) if no unilateral deviation in strategy by any single player is profitable for that player, that is
is a Nash equilibrium (NE) if no unilateral deviation in strategy by any single player is profitable for that player, that is

When the inequality above holds strictly (with > instead of ≥) for all players and all feasible alternative strategies, then the equilibrium is classified as a strict Nash equilibrium. If instead, for some player, there is exact equality between  and some other strategy in the set
and some other strategy in the set  , then the equilibrium is classified as a weak Nash equilibrium.
, then the equilibrium is classified as a weak Nash equilibrium.
A game can have either a pure-strategy or a mixed Nash Equilibrium. (In the latter a pure strategy is chosen stochastically with a fixed probability).
Nash's Existence Theorem
Nash proved that if we allow mixed strategies, then every game with a finite number of players in which each player can choose from finitely many pure strategies has at least one Nash equilibrium.
Examples
Coordination game
| Player 2 adopts strategy A | Player 2 adopts strategy B | |
|---|---|---|
| Player 1 adopts strategy A | 4 / 4 | 1 / 3 |
| Player 1 adopts strategy B | 3 / 1 | 2 / 2 |
The coordination game is a classic (symmetric) two player, two strategy game, with an example payoff matrix shown to the right. The players should thus coordinate, both adopting strategy A, to receive the highest payoff; i.e., 4. If both players chose strategy B though, there is still a Nash equilibrium. Although each player is awarded less than optimal payoff, neither player has incentive to change strategy due to a reduction in the immediate payoff (from 2 to 1).
A famous example of this type of game was called the stag hunt; in the game two players may choose to hunt a stag or a rabbit, the former providing more meat (4 utility units) than the latter (1 utility unit). The caveat is that the stag must be cooperatively hunted, so if one player attempts to hunt the stag, while the other hunts the rabbit, he will fail in hunting (0 utility units), whereas if they both hunt it they will split the payload (2, 2). The game hence exhibits two equilibria at (stag, stag) and (rabbit, rabbit) and hence the players' optimal strategy depend on their expectation on what the other player may do. If one hunter trusts that the other will hunt the stag, he should hunt the stag; however if he suspects that the other will hunt the rabbit, he should hunt the rabbit. This game was used as an analogy for social cooperation, since much of the benefit that people gain in society depends upon people cooperating and implicitly trusting one another to act in a manner corresponding with cooperation.
Another example of a coordination game is the setting where two technologies are available to two firms with compatible products, and they have to elect a strategy to become the market standard. If both firms agree on the chosen technology, high sales are expected for both firms. If the firms do not agree on the standard technology, few sales result. Both strategies are Nash equilibria of the game.
Driving on a road against an oncoming car, and having to choose either to swerve on the left or to swerve on the right of the road, is also a coordination game. For example, with payoffs 10 meaning no crash and 0 meaning a crash, the coordination game can be defined with the following payoff matrix:
| Drive on the Left | Drive on the Right | |
|---|---|---|
| Drive on the Left | 10, 10 | 0, 0 |
| Drive on the Right | 0, 0 | 10, 10 |
In this case there are two pure strategy Nash equilibria, when both choose to either drive on the left or on the right. If we admit mixed strategies (where a pure strategy is chosen at random, subject to some fixed probability), then there are three Nash equilibria for the same case: two we have seen from the pure-strategy form, where the probabilities are (0%,100%) for player one, (0%, 100%) for player two; and (100%, 0%) for player one, (100%, 0%) for player two respectively. We add another where the probabilities for each player is (50%, 50%).
Prisoner's dilemma
| Cooperate (with other) | Defect (betray other) | |
|---|---|---|
| Cooperate (with other) | 4, 4 | 0, 5 |
| Defect (betray other) | 5, 0 | 3, 3 |
Imagine two prisoners held in separate cells, interrogated simultaneously, and offered deals (lighter jail sentences) for betraying their fellow criminal. They can "cooperate" (with the other prisoner) by not snitching, or "defect" by betraying the other. However, there is a catch; if both players defect, then they both serve a longer sentence than if neither said anything. Lower jail sentences are interpreted as higher payoffs (shown in the table).
The prisoner's dilemma has a similar matrix as depicted for the coordination game, but the maximum reward for each player (in this case, 5) is obtained only when the players' decisions are different. Each player improves his own situation by switching from "cooperating" to "defecting," given knowledge that the other player's best decision is to "defect." The prisoner's dilemma thus has a single Nash equilibrium: both players choosing to defect.
What has long made this an interesting case to study is the fact that this scenario is globally inferior to "both cooperating." That is, both players would be better off if they both chose to "cooperate" instead of both choosing to defect. However, each player could improve his own situation by breaking the mutual cooperation, no matter how the other player possibly (or certainly) changes his decision.
Network traffic
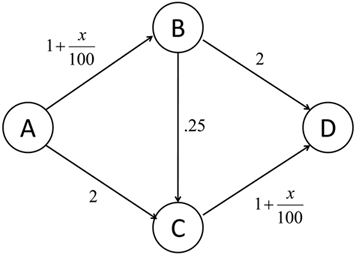
An application of Nash equilibria is in determining the expected flow of traffic in a network. Consider the graph on the right. If we assume that there are  "cars" traveling from A to D, what is the expected distribution of traffic in the network?
"cars" traveling from A to D, what is the expected distribution of traffic in the network?
This situation can be modeled as a "game" where every traveler has a choice of 3 strategies, where each strategy is a route from A to D (either  ,
,  , or
, or  ). The "payoff" of each strategy is the travel time of each route. In the graph on the right, a car travelling via experiences travel time of
). The "payoff" of each strategy is the travel time of each route. In the graph on the right, a car travelling via experiences travel time of  , where is the number of cars traveling on edge
, where is the number of cars traveling on edge  . Thus, payoffs for any given strategy depend on the choices of the other players, as is usual. However, the goal in this case is to minimize travel time, not maximize it. Equilibrium will occur when the time on all paths is exactly the same. When that happens, no single driver has any incentive to switch routes, since it can only add to his/her travel time. For the graph on the right, if, for example, 100 cars are travelling from A to D, then equilibrium will occur when 25 drivers travel via , 50 via , and 25 via . Every driver now has a total travel time of 3.75 (to see this, note that a total of 75 cars take the edge, and likewise 75 cars take the
. Thus, payoffs for any given strategy depend on the choices of the other players, as is usual. However, the goal in this case is to minimize travel time, not maximize it. Equilibrium will occur when the time on all paths is exactly the same. When that happens, no single driver has any incentive to switch routes, since it can only add to his/her travel time. For the graph on the right, if, for example, 100 cars are travelling from A to D, then equilibrium will occur when 25 drivers travel via , 50 via , and 25 via . Every driver now has a total travel time of 3.75 (to see this, note that a total of 75 cars take the edge, and likewise 75 cars take the  edge).
edge).
Notice that this distribution is not, actually, socially optimal. If the 100 cars agreed that 50 travel via and the other 50 through , then travel time for any single car would actually be 3.5 which is less than 3.75. This is also the Nash equilibrium if the path between B and C is removed, which means that adding an additional possible route can decrease the efficiency of the system, a phenomenon known as Braess's paradox.
Competition game
| Player 2 chooses '0' | Player 2 chooses '1' | Player 2 chooses '2' | Player 2 chooses '3' | |
|---|---|---|---|---|
| Player 1 chooses '0' | 0, 0 | 2, -2 | 2, -2 | 2, -2 |
| Player 1 chooses '1' | -2, 2 | 1, 1 | 3, -1 | 3, -1 |
| Player 1 chooses '2' | -2, 2 | -1, 3 | 2, 2 | 4, 0 |
| Player 1 chooses '3' | -2, 2 | -1, 3 | 0, 4 | 3, 3 |
This can be illustrated by a two-player game in which both players simultaneously choose an integer from 0 to 3 and they both win the smaller of the two numbers in points. In addition, if one player chooses a larger number than the other, then he/she has to give up two points to the other.
This game has a unique pure-strategy Nash equilibrium: both players choosing 0 (highlighted in light red). Any other strategy can be improved by a player switching his number to one less than that of the other player. In the table to the right, if the game begins at the green square, it is in player 1's interest to move to the purple square and it is in player 2's interest to move to the blue square. Although it would not fit the definition of a competition game, if the game is modified so that the two players win the named amount if they both choose the same number, and otherwise win nothing, then there are 4 Nash equilibria: (0,0), (1,1), (2,2), and (3,3).
Nash equilibria in a payoff matrix
There is an easy numerical way to identify Nash equilibria on a payoff matrix. It is especially helpful in two-person games where players have more than two strategies. In this case formal analysis may become too long. This rule does not apply to the case where mixed (stochastic) strategies are of interest. The rule goes as follows: if the first payoff number, in the payoff pair of the cell, is the maximum of the column of the cell and if the second number is the maximum of the row of the cell - then the cell represents a Nash equilibrium.
| Option A | Option B | Option C | |
|---|---|---|---|
| Option A | 0, 0 | 25, 40 | 5, 10 |
| Option B | 40, 25 | 0, 0 | 5, 15 |
| Option C | 10, 5 | 15, 5 | 10, 10 |
We can apply this rule to a 3×3 matrix:
Using the rule, we can very quickly (much faster than with formal analysis) see that the Nash equilibria cells are (B,A), (A,B), and (C,C). Indeed, for cell (B,A) 40 is the maximum of the first column and 25 is the maximum of the second row. For (A,B) 25 is the maximum of the second column and 40 is the maximum of the first row. Same for cell (C,C). For other cells, either one or both of the duplet members are not the maximum of the corresponding rows and columns.
This said, the actual mechanics of finding equilibrium cells is obvious: find the maximum of a column and check if the second member of the pair is the maximum of the row. If these conditions are met, the cell represents a Nash equilibrium. Check all columns this way to find all NE cells. An N×N matrix may have between 0 and N×N pure strategy Nash equilibria.
Stability
The concept of stability, useful in the analysis of many kinds of equilibria, can also be applied to Nash equilibria.
A Nash equilibrium for a mixed strategy game is stable if a small change (specifically, an infinitesimal change) in probabilities for one player leads to a situation where two conditions hold:
- the player who did not change has no better strategy in the new circumstance
- the player who did change is now playing with a strictly worse strategy.
If these cases are both met, then a player with the small change in his mixed-strategy will return immediately to the Nash equilibrium. The equilibrium is said to be stable. If condition one does not hold then the equilibrium is unstable. If only condition one holds then there are likely to be an infinite number of optimal strategies for the player who changed. John Nash showed that the latter situation could not arise in a range of well-defined games.
In the "driving game" example above there are both stable and unstable equilibria. The equilibria involving mixed-strategies with 100% probabilities are stable. If either player changes his probabilities slightly, they will be both at a disadvantage, and his opponent will have no reason to change his strategy in turn. The (50%,50%) equilibrium is unstable. If either player changes his probabilities, then the other player immediately has a better strategy at either (0%, 100%) or (100%, 0%).
Stability is crucial in practical applications of Nash equilibria, since the mixed-strategy of each player is not perfectly known, but has to be inferred from statistical distribution of his actions in the game. In this case unstable equilibria are very unlikely to arise in practice, since any minute change in the proportions of each strategy seen will lead to a change in strategy and the breakdown of the equilibrium.
The Nash equilibrium defines stability only in terms of unilateral deviations. In cooperative games such a concept is not convincing enough. Strong Nash equilibrium allows for deviations by every conceivable coalition.[9] Formally, a strong Nash equilibrium is a Nash equilibrium in which no coalition, taking the actions of its complements as given, can cooperatively deviate in a way that benefits all of its members.[10] However, the strong Nash concept is sometimes perceived as too "strong" in that the environment allows for unlimited private communication. In fact, strong Nash equilibrium has to be Pareto efficient. As a result of these requirements, strong Nash is too rare to be useful in many branches of game theory. However, in games such as elections with many more players than possible outcomes, it can be more common than a stable equilibrium.
A refined Nash equilibrium known as coalition-proof Nash equilibrium (CPNE)[9] occurs when players cannot do better even if they are allowed to communicate and make "self-enforcing" agreement to deviate. Every correlated strategy supported by iterated strict dominance and on the Pareto frontier is a CPNE.[11] Further, it is possible for a game to have a Nash equilibrium that is resilient against coalitions less than a specified size, k. CPNE is related to the theory of the core.
Finally in the eighties, building with great depth on such ideas Mertens-stable equilibria were introduced as a solution concept. Mertens stable equilibria satisfy both forward induction and backward induction. In a game theory context stable equilibria now usually refer to Mertens stable equilibria.
Occurrence
If a game has a unique Nash equilibrium and is played among players under certain conditions, then the NE strategy set will be adopted. Sufficient conditions to guarantee that the Nash equilibrium is played are:
- The players all will do their utmost to maximize their expected payoff as described by the game.
- The players are flawless in execution.
- The players have sufficient intelligence to deduce the solution.
- The players know the planned equilibrium strategy of all of the other players.
- The players believe that a deviation in their own strategy will not cause deviations by any other players.
- There is common knowledge that all players meet these conditions, including this one. So, not only must each player know the other players meet the conditions, but also they must know that they all know that they meet them, and know that they know that they know that they meet them, and so on.
Where the conditions are not met
Examples of game theory problems in which these conditions are not met:
- The first condition is not met if the game does not correctly describe the quantities a player wishes to maximize. In this case there is no particular reason for that player to adopt an equilibrium strategy. For instance, the prisoner’s dilemma is not a dilemma if either player is happy to be jailed indefinitely.
- Intentional or accidental imperfection in execution. For example, a computer capable of flawless logical play facing a second flawless computer will result in equilibrium. Introduction of imperfection will lead to its disruption either through loss to the player who makes the mistake, or through negation of the common knowledge criterion leading to possible victory for the player. (An example would be a player suddenly putting the car into reverse in the game of chicken, ensuring a no-loss no-win scenario).
- In many cases, the third condition is not met because, even though the equilibrium must exist, it is unknown due to the complexity of the game, for instance in Chinese chess.[12] Or, if known, it may not be known to all players, as when playing tic-tac-toe with a small child who desperately wants to win (meeting the other criteria).
- The criterion of common knowledge may not be met even if all players do, in fact, meet all the other criteria. Players wrongly distrusting each other's rationality may adopt counter-strategies to expected irrational play on their opponents’ behalf. This is a major consideration in "chicken" or an arms race, for example.
Where the conditions are met
Due to the limited conditions in which NE can actually be observed, they are rarely treated as a guide to day-to-day behaviour, or observed in practice in human negotiations. However, as a theoretical concept in economics and evolutionary biology, the NE has explanatory power. The payoff in economics is utility (or sometimes money), and in evolutionary biology gene transmission, both are the fundamental bottom line of survival. Researchers who apply games theory in these fields claim that strategies failing to maximize these for whatever reason will be competed out of the market or environment, which are ascribed the ability to test all strategies. This conclusion is drawn from the "stability" theory above. In these situations the assumption that the strategy observed is actually a NE has often been borne out by research. [13]
NE and non-credible threats
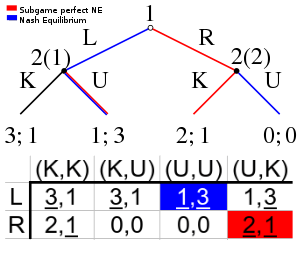
The Nash equilibrium is a superset of the subgame perfect Nash equilibrium. The subgame perfect equilibrium in addition to the Nash equilibrium requires that the strategy also is a Nash equilibrium in every subgame of that game. This eliminates all non-credible threats, that is, strategies that contain non-rational moves in order to make the counter-player change his strategy.
The image to the right shows a simple sequential game that illustrates the issue with subgame imperfect Nash equilibria. In this game player one chooses left(L) or right(R), which is followed by player two being called upon to be kind (K) or unkind (U) to player one, However, player two only stands to gain from being unkind if player one goes left. If player one goes right the rational player two would de facto be kind to him in that subgame. However, The non-credible threat of being unkind at 2(2) is still part of the blue (L, (U,U)) Nash equilibrium. Therefore, if rational behavior can be expected by both parties the subgame perfect Nash equilibrium may be a more meaningful solution concept when such dynamic inconsistencies arise.
Proof of existence
Proof using the Kakutani fixed point theorem
Nash's original proof (in his thesis) used Brouwer's fixed point theorem (e.g., see below for a variant). We give a simpler proof via the Kakutani fixed point theorem, following Nash's 1950 paper (he credits David Gale with the observation that such a simplification is possible).
To prove the existence of a Nash Equilibrium, let  be the best response of player i to the strategies of all other players.
be the best response of player i to the strategies of all other players.

Here,  , where
, where  , is a mixed strategy profile in the set of all mixed strategies and
, is a mixed strategy profile in the set of all mixed strategies and  is the payoff function for player i. Define a set-valued function
is the payoff function for player i. Define a set-valued function  such that
such that  . The existence of a Nash Equilibrium is equivalent to
. The existence of a Nash Equilibrium is equivalent to  having a fixed point.
having a fixed point.
Kakutani's fixed point theorem guarantees the existence of a fixed point if the following four conditions are satisfied.
-
 is compact, convex, and nonempty.
is compact, convex, and nonempty. -
 is nonempty.
is nonempty. - is convex.
- is upper hemicontinuous
Condition 1. is satisfied from the fact that is a simplex and thus compact. Convexity follows from players' ability to mix strategies. is nonempty as long as players have strategies.
Condition 2. is satisfied because players maximize expected payoffs which is continuous function over a compact set. The Weierstrass extreme value theorem guarantees that there is always a maximum value.
Condition 3. is satisfied as a result of mixed strategies. Suppose  , then
, then  . i.e. if two strategies maximize payoffs, then a mix between the two strategies will yield the same payoff.
. i.e. if two strategies maximize payoffs, then a mix between the two strategies will yield the same payoff.
Condition 4. is satisfied by way of Berge's maximum theorem. Because is continuous and compact,  is upper hemicontinuous.
is upper hemicontinuous.
Therefore, there exists a fixed point in and a Nash equilibrium.[14]
When Nash made this point to John von Neumann in 1949, von Neumann famously dismissed it with the words, "That's trivial, you know. That's just a fixed point theorem." (See Nasar, 1998, p. 94.)
Alternate proof using the Brouwer fixed-point theorem
We have a game  where
where  is the number of players and
is the number of players and  is the action set for the players. All of the action sets
is the action set for the players. All of the action sets  are finite. Let
are finite. Let  denote the set of mixed strategies for the players. The finiteness of the s ensures the compactness of
denote the set of mixed strategies for the players. The finiteness of the s ensures the compactness of  .
.
We can now define the gain functions. For a mixed strategy  , we let the gain for player on action
, we let the gain for player on action  be
be

The gain function represents the benefit a player gets by unilaterally changing his strategy.
We now define  where
where

for  . We see that
. We see that

We now use  to define
to define  as follows.
Let
as follows.
Let
for . It is easy to see that each  is a valid mixed strategy in
is a valid mixed strategy in  . It is also easy to check that each is a continuous function of
. It is also easy to check that each is a continuous function of  , and hence
, and hence  is a continuous function. Now is the cross product of a finite number of compact convex sets, and so we get that is also compact and convex. Therefore we may apply the Brouwer fixed point theorem to . So has a fixed point in , call it
is a continuous function. Now is the cross product of a finite number of compact convex sets, and so we get that is also compact and convex. Therefore we may apply the Brouwer fixed point theorem to . So has a fixed point in , call it  .
.
I claim that is a Nash Equilibrium in  . For this purpose, it suffices to show that
. For this purpose, it suffices to show that

This simply states that each player gains no benefit by unilaterally changing his strategy, which is exactly the necessary condition for a Nash equilibrium.
Now assume that the gains are not all zero. Therefore,  ,
,  , and such that
, and such that  . Note then that
. Note then that

So let  . Also we shall denote
. Also we shall denote  as the gain vector indexed by
actions in . Since
as the gain vector indexed by
actions in . Since  we clearly have that
we clearly have that  . Therefore we see that
. Therefore we see that


Since  we have that
we have that  is some positive scaling of the vector
is some positive scaling of the vector  .
Now I claim that
.
Now I claim that

 . To see this, we first note that if then this is true by definition of the gain function. Now assume that
. To see this, we first note that if then this is true by definition of the gain function. Now assume that  . By our previous statements we have that
. By our previous statements we have that

and so the left term is zero, giving us that the entire expression is  as needed.
as needed.
So we finally have that





where the last inequality follows since is a non-zero vector. But this is a clear contradiction, so all the gains must indeed be zero. Therefore is a Nash Equilibrium for as needed.
Computing Nash equilibria
If a player A has a dominant strategy  then there exists a Nash equilibrium in which A plays . In the case of two players A and B, there exists a Nash equilibrium in which A plays and B plays a best response to . If is a strictly dominant strategy, A plays in all Nash equilibria. If both A and B have strictly dominant strategies, there exists a unique Nash equilibrium in which each plays his strictly dominant strategy.
then there exists a Nash equilibrium in which A plays . In the case of two players A and B, there exists a Nash equilibrium in which A plays and B plays a best response to . If is a strictly dominant strategy, A plays in all Nash equilibria. If both A and B have strictly dominant strategies, there exists a unique Nash equilibrium in which each plays his strictly dominant strategy.
In games with mixed strategy Nash equilibria, the probability of a player choosing any particular strategy can be computed by assigning a variable to each strategy that represents a fixed probability for choosing that strategy. In order for a player to be willing to randomize, his expected payoff for each strategy should be the same. In addition, the sum of the probabilities for each strategy of a particular player should be 1. This creates a system of equations from which the probabilities of choosing each strategy can be derived.[8]
Examples
| Player B plays H | Player B plays T | |
|---|---|---|
| Player A plays H | −1, +1 | +1, −1 |
| Player A plays T | +1, −1 | −1, +1 |
In the matching pennies game, player A loses a point to B if A and B play the same strategy and wins a point from B if they play different strategies. To compute the mixed strategy Nash equilibrium, assign A the probability p of playing H and (1−p) of playing T, and assign B the probability q of playing H and (1−q) of playing T.
- E[payoff for A playing H] = (−1)q + (+1)(1−q) = 1−2q
- E[payoff for A playing T] = (+1)q + (−1)(1−q) = 2q−1
- E[payoff for A playing H] = E[payoff for A playing T] ⇒ 1−2q = 2q−1 ⇒ q = 1/2
- E[payoff for B playing H] = (+1)p + (−1)(1−p) = 2p−1
- E[payoff for B playing T] = (−1)p + (+1)(1−p) = 1−2p
- E[payoff for B playing H] = E[payoff for B playing T] ⇒ 2p−1 = 1−2p ⇒ p = 1/2
Thus a mixed strategy Nash equilibrium in this game is for each player to randomly choose H or T with equal probability.
See also
- Adjusted winner procedure
- Best response
- Braess's paradox
- Complementarity theory
- Conflict resolution research
- Cooperation
- Equilibrium selection
- Evolutionarily stable strategy
- Game theory
- Glossary of game theory
- Hotelling's law
Notes
ReferencesGame theory textbooks
Original Nash papers
Other references
External links |