Laplacian matrix
In the mathematical field of graph theory, the Laplacian matrix, sometimes called admittance matrix, Kirchhoff matrix or discrete Laplacian, is a matrix representation of a graph. Together with Kirchhoff's theorem, it can be used to calculate the number of spanning trees for a given graph. The Laplacian matrix can be used to find many other properties of the graph; see spectral graph theory. Cheeger's inequality from Riemannian geometry has a discrete analogue involving the Laplacian matrix; this is perhaps the most important theorem in spectral graph theory and one of the most useful facts in algorithmic applications. It approximates the sparsest cut of a graph through the second eigenvalue of its Laplacian.
Definition
Given a simple graph G with n vertices, its Laplacian matrix  is defined as:[1]
is defined as:[1]

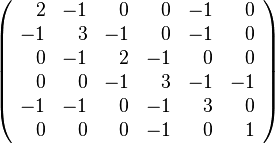
That is, it is the difference of the degree matrix D and the adjacency matrix A of the graph. In the case of directed graphs, either the indegree or outdegree might be used, depending on the application.
From the definition it follows that:

where deg(vi) is degree of the vertex i.
The normalized Laplacian matrix is defined as:[1]

Example
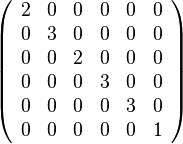
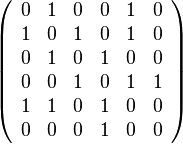
Here is a simple example of a labeled graph and its Laplacian matrix.
| Labeled graph | Degree matrix | Adjacency matrix | Laplacian matrix |
|---|---|---|---|
 |
 |
 |
 |
Properties
For a graph G and its Laplacian matrix L with eigenvalues  :
:
- L is always positive-semidefinite (
 ). This is verified in the following Incidence matrix section.
). This is verified in the following Incidence matrix section. - The number of times 0 appears as an eigenvalue in the Laplacian is the number of connected components in the graph.
- L is an M-matrix.
-
 is always 0 because every Laplacian matrix has an eigenvector
is always 0 because every Laplacian matrix has an eigenvector ![{\mathbf {v}}_{0}=[1,1,\dots ,1]](/2014-wikipedia_en_all_02_2014/I/media/e/3/9/3/e393e746cec69844cea1f5113d1e0b8e.png) that, for each row, adds the corresponding node's degree (from the diagonal) to a "-1" for each neighbor so that
that, for each row, adds the corresponding node's degree (from the diagonal) to a "-1" for each neighbor so that 
- The smallest non-zero eigenvalue of L is called the spectral gap.
- The second smallest eigenvalue of L is the algebraic connectivity (or Fiedler value) of G.
- The Laplacian is an operator on the function of g. When G is k-regular,
 ,
,
where A is the adjacency matrix of G and I is an identity matrix. All matrices are n × n where n is the number of vertices in G.
- For a graph with multiple connected components, L is a block diagonal matrix, where each block is the respective Laplacian matrix for each component.
Incidence matrix
Define an  x
x  oriented incidence matrix M with element Mev for edge e (connecting vertex i and j, with i > j) and vertex v given by
oriented incidence matrix M with element Mev for edge e (connecting vertex i and j, with i > j) and vertex v given by

Then the Laplacian matrix L satisfies

where  is the matrix transpose of M.
is the matrix transpose of M.
Now consider an eigendecomposition of  , with unit-norm eigenvectors
, with unit-norm eigenvectors  and corresponding eigenvalues
and corresponding eigenvalues  :
:

Because can be written as the inner product of the vector  with itself, this shows that
with itself, this shows that  and so the eigenvalues of are all non-negative.
and so the eigenvalues of are all non-negative.
Deformed Laplacian
The deformed Laplacian is commonly defined as

where I is the unit matrix, A is the adjacency matrix, and D is the degree matrix, and s is a (complex-valued) number. Note that the standard Laplacian is just  .
.
Symmetric normalized Laplacian
The symmetric normalized Laplacian (a.k.a. normalized Laplacian) is defined as

where A is the adjacency matrix and D is the degree matrix. Since the degree matrix D is diagonal, its reciprocal square root  is simply defined as a diagonal matrix, having diagonal entries which are the reciprocals of the positive square roots of the corresponding positive diagonal entries of D. The symmetric normalized Laplacian is a symmetric matrix.
is simply defined as a diagonal matrix, having diagonal entries which are the reciprocals of the positive square roots of the corresponding positive diagonal entries of D. The symmetric normalized Laplacian is a symmetric matrix.
 ,
,
where S is the matrix whose rows are indexed by the vertices and whose columns are indexed by the edges of G such that each column corresponding to an edge e = {u, v} has an entry  in the row corresponding to u, an entry
in the row corresponding to u, an entry  in the row corresponding to v, and has 0 entries elsewhere. (Note:
in the row corresponding to v, and has 0 entries elsewhere. (Note:  denotes the transpose of S).
denotes the transpose of S).
The symmetric normalized Laplacian can also be written as

All eigenvalues of the normalized Laplacian are real and non-negative. In fact,if λ is an eigenvalue of L, then 0 ≤ λ ≤ 2. These eigenvalues (known as spectra of the normalized Laplacian) relate well to other graph invariants for general graphs.[2]
Since  is symmetric, its eigenvalues are real and non-negative. We can use its characterization in terms of Rayleigh quotient of .
is symmetric, its eigenvalues are real and non-negative. We can use its characterization in terms of Rayleigh quotient of .
Let g be an arbitrary function which assigns to each vertex v of G a real value g(v). We can treat g as a column vector.
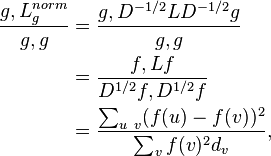
where  and
and  denotes the sum over all unordered pairs {u,v} for which u and v are adjacent.
denotes the sum over all unordered pairs {u,v} for which u and v are adjacent.  is called the Dirichlet sum of G. The left hand side of the equation is Rayleigh quotient.
is called the Dirichlet sum of G. The left hand side of the equation is Rayleigh quotient.
The eigenvalues of by  . the set of is usually called the spectrum of Let 1 be the function which assumes the value 1 on each vertex. Then
. the set of is usually called the spectrum of Let 1 be the function which assumes the value 1 on each vertex. Then  is an eigenfunction of with eigenvalue 0.
is an eigenfunction of with eigenvalue 0.
Random walk normalized Laplacian
The random walk normalized Laplacian is defined as

where A is the adjacency matrix and D is the degree matrix. Since the degree matrix D is diagonal, its inverse  is simply defined as a diagonal matrix, having diagonal entries which are the reciprocals of the corresponding positive diagonal entries of D. The name of this operator comes from the fact that, indeed,
is simply defined as a diagonal matrix, having diagonal entries which are the reciprocals of the corresponding positive diagonal entries of D. The name of this operator comes from the fact that, indeed,  is the transition matrix of a standard random walk on the given graph.
is the transition matrix of a standard random walk on the given graph.
One can check that
-
 ,
,
i.e., is similar to a scalar perturbation of the normalized Laplacian . For this reason, even if is in general not hermitian, it has real eigenvalues. Indeed, its eigenvalues agree with those of (which is hermitian), up to a mirroring in the point  .
.
Random walks on graphs
As an aside about random walks on graphs, consider a simple undirected graph. Consider the probability that a walk is at a vertex i at time t comes from vertex j at time t-1 (assuming a uniform chance of taking a step along any of the edges attached to vertex j):

or in matrix-vector notation:

(At equilibrium where  , this is written as
, this is written as  ).
).
We can rewrite this relation as
![{\begin{aligned}D^{{-{\frac 12}}}p(t)&=D^{{-{\frac 12}}}AD^{{-1}}p(t-1)\\&=\left[D^{{-{\frac 12}}}AD^{{-{\frac 12}}}\right]D^{{-{\frac 12}}}p(t-1).\end{aligned}}](/2014-wikipedia_en_all_02_2014/I/media/f/3/f/c/f3fc048efac61db026d78f9a345a8ec9.png)
 is a symmetric matrix called the reduced adjacency matrix. So, taking steps on this random walk requires repeated multiplication of
is a symmetric matrix called the reduced adjacency matrix. So, taking steps on this random walk requires repeated multiplication of  , which is a simple operation because is symmetric.
, which is a simple operation because is symmetric.
Interpretation as the discrete Laplace operator
The Laplacian matrix can be interpreted as a matrix representation of a particular case of the negative discrete Laplace operator. Such an interpretation allows one, e.g., to generalise the Laplacian matrix to the case of graphs with an infinite number of vertices and edges, leading to a Laplacian matrix of an infinite size.
To expand upon this, we can describe the change of some element  (with some constant k) as
(with some constant k) as
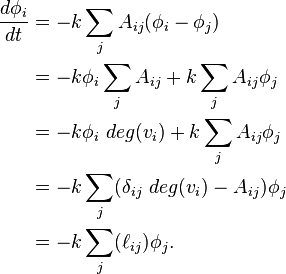
In matrix-vector notation,
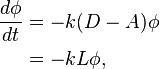
which gives
Notice that this equation takes the same form as the heat equation, where the matrix L is replacing the Laplacian operator  ; hence, the "graph Laplacian".
; hence, the "graph Laplacian".
To find a solution to this differential equation, apply standard techniques for solving a first-order matrix differential equation. That is, write  as a linear combination of eigenvectors of L (so that
as a linear combination of eigenvectors of L (so that  ), with time-dependent coefficients
), with time-dependent coefficients  :
:

Plugging into the original expression (note that we will use the fact that because L is a symmetric matrix, its unit-norm eigenvectors are orthogonal):
![{\begin{aligned}{\frac {d(\sum _{i}c_{i}{\mathbf {v}}_{i})}{dt}}+kL(\sum _{i}c_{i}{\mathbf {v}}_{i})&=0\\\sum _{i}\left[{\frac {dc_{i}}{dt}}{\mathbf {v}}_{i}+kc_{i}L{\mathbf {v}}_{i}\right]&=\\\sum _{i}\left[{\frac {dc_{i}}{dt}}{\mathbf {v}}_{i}+kc_{i}\lambda _{i}{\mathbf {v}}_{i}\right]&=\\{\frac {dc_{i}}{dt}}+k\lambda _{i}c_{i}&=0,\\\end{aligned}}](/2014-wikipedia_en_all_02_2014/I/media/5/f/8/0/5f8002044d8fb559e6ed37e81334e479.png)
whose solution is

As shown before, the eigenvalues of L are non-negative, showing that the solution to the diffusion equation approaches an equilibrium, because it only exponentially decays or remains constant. This also shows that given and the initial condition  , the solution at any time t can be found.[4]
, the solution at any time t can be found.[4]
To find for each  in terms of the overall initial condition
in terms of the overall initial condition  , simply project onto the unit-norm eigenvectors ;
, simply project onto the unit-norm eigenvectors ;
 .
.
In the case of undirected graphs, this works because is symmetric, and by the spectral theorem, its eigenvectors are all orthogonal. So the projection onto the eigenvectors of is simply an orthogonal coordinate transformation of the initial condition to a set of coordinates which decay exponentially and independently of each other.
Equilibrium Behavior
To understand  , note that the only terms
, note that the only terms  that remain are those where
that remain are those where  , since
, since

In other words, the equilibrium state of the system is determined completely by the kernel of .
Since by definition,  , the vector
, the vector  of all ones is in the kernel. Note also that if there are
of all ones is in the kernel. Note also that if there are  disjoint connected components in the graph, then this vector of all ones can be split into the sum of independent
disjoint connected components in the graph, then this vector of all ones can be split into the sum of independent  eigenvectors of ones and zeros, where each connected component corresponds to an eigenvector with ones at the elements in the connected component and zeros elsewhere.
eigenvectors of ones and zeros, where each connected component corresponds to an eigenvector with ones at the elements in the connected component and zeros elsewhere.
The consequence of this is that for a given initial condition for a graph with  vertices
vertices

where
![{\mathbf {v^{1}}}={\frac {1}{{\sqrt {N}}}}[1,1,...,1]](/2014-wikipedia_en_all_02_2014/I/media/9/9/4/4/994459d6c17cc93baa35ac8cce446437.png)
For each vertex  in the graph, this can be rewritten as
in the graph, this can be rewritten as

In other words, at steady state, the value of converges to the same value at each of the vertices of the graph, which is the average of the initial values at all of the vertices. Since this is the solution to the heat diffusion equation, this makes perfect sense intuitively. We expect that neighboring elements in the graph will exchange energy until that energy is spread out evenly throughout all of the elements that are connected to each other.
Example of the Operator on a Grid

This section shows an example of a function diffusing over time through a graph. The graph in this example is constructed on a 2D discrete grid, with points on the grid connected to their eight neighbors. Three initial points are specified to have a positive value, while the rest of the values in the grid are zero. Over time, the exponential decay acts to distribute the values at these points evenly throughout the entire grid.
The complete Matlab source code that was used to generate this animation is provided below. It shows the process of specifying initial conditions, projecting these initial conditions onto the eigenvalues of the Laplacian Matrix, and simulating the exponential decay of these projected initial conditions.
N = 20;%The number of pixels along a dimension of the image A = zeros(N, N);%The image Adj = zeros(N*N, N*N);%The adjacency matrix %Use 8 neighbors, and fill in the adjacency matrix dx = [-1, 0, 1, -1, 1, -1, 0, 1]; dy = [-1, -1, -1, 0, 0, 1, 1, 1]; for x = 1:N for y = 1:N index = (x-1)*N + y; for ne = 1:length(dx) newx = x + dx(ne); newy = y + dy(ne); if newx > 0 && newx <= N && newy > 0 && newy <= N index2 = (newx-1)*N + newy; Adj(index, index2) = 1; end end end end %%%BELOW IS THE KEY CODE THAT COMPUTES THE SOLUTION TO THE DIFFERENTIAL %%%EQUATION Deg = diag(sum(Adj, 2));%Compute the degree matrix L = Deg - Adj;%Compute the laplacian matrix in terms of the degree and adjacency matrices [V, D] = eig(L);%Compute the eigenvalues/vectors of the laplacian matrix D = diag(D); %Initial condition (place a few large positive values around and %make everything else zero) C0 = zeros(N, N); C0(2:5, 2:5) = 5; C0(10:15, 10:15) = 10; C0(2:5, 8:13) = 7; C0 = C0(:); C0V = V'*C0;%Transform the initial condition into the coordinate system %of the eigenvectors for t = 0:0.05:5 %Loop through times and decay each initial component Phi = C0V.*exp(-D*t);%Exponential decay for each component Phi = V*Phi;%Transform from eigenvector coordinate system to original coordinate system Phi = reshape(Phi, N, N); %Display the results and write to GIF file imagesc(Phi); caxis([0, 10]); title(sprintf('Diffusion t = %3f', t)); frame = getframe(1); im = frame2im(frame); [imind, cm] = rgb2ind(im, 256); if t == 0 imwrite(imind, cm, 'out.gif', 'gif', 'Loopcount', inf, 'DelayTime', 0.1); else imwrite(imind, cm, 'out.gif', 'gif', 'WriteMode', 'append', 'DelayTime', 0.1); end end
As an approximation to the negative continuous Laplacian
The graph Laplacian matrix can be further viewed as a matrix form of an approximation to the negative Laplacian operator obtained by the finite difference method [citation needed]. In this interpretation, every graph vertex is treated as a grid point; the local connectivity of the vertex determines the finite difference approximation stencil at this grid point, the grid size is always one for every edge, and there are no constraints on any grid points, which corresponds to the case of the homogeneous Neumann boundary condition, i.e., free boundary.
See also
References
- ↑ 1.0 1.1 Weisstein, Eric W., "Laplacian Matrix", MathWorld.
- ↑ Chung, Fan (1992, revised 1997). Spectral Graph Theory. American Mathematical Society. ISBN 0821803158.
- ↑ Chung, Fan R.K. (1997). Spectral graph theory (Repr. with corr., 2. [pr.] ed.). Providence, RI: American Math. Soc. ISBN 0-8218-0315-8.
- ↑ Newman, Mark (2010). Networks: An Introduction. Oxford University Press. ISBN 0199206651.
T. Sunada, Discrete geometric analysis, Proceedings of Symposia in Pure Mathematics, (ed. by P. Exner, J. P. Keating, P. Kuchment, T. Sunada, A. Teplyaev), 77 (2008), 51-86.