Circumscribed circle
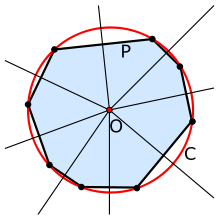
In geometry, the circumscribed circle or circumcircle of a polygon is a circle which passes through all the vertices of the polygon. The center of this circle is called the circumcenter and its radius is called the circumradius.
A polygon which has a circumscribed circle is called a cyclic polygon (sometimes a concyclic polygon, because the vertices are concyclic). All regular simple polygons, isosceles trapezoids, all triangles and all rectangles are cyclic.
A related notion is the one of a minimum bounding circle, which is the smallest circle that completely contains the polygon within it. Not every polygon has a circumscribed circle, as the vertices of a polygon do not need to all lie on a circle, but every polygon has a unique minimum bounding circle, which may be constructed by a linear time algorithm. Even if a polygon has a circumscribed circle, it may not coincide with its minimum bounding circle; for example, for an obtuse triangle, the minimum bounding circle has the longest side as diameter and does not pass through the opposite vertex.
Triangles

All triangles are cyclic, i.e. every triangle has a circumscribed circle.[nb 1]
The circumcenter of a triangle can be found as the intersection of any two of the three perpendicular bisectors. (A perpendicular bisector is a line that forms a right angle with one of the triangle's sides and intersects that side at its midpoint.) This is because the circumcenter is equidistant from any pair of the triangle's vertices, and all points on the perpendicular bisectors are equidistant from two of the vertices of the triangle.

An alternate method to determine the circumcenter is to draw any two lines each departing one of the vertices at an angle with the common side, the common angle of departure being 90° minus the angle of the opposite vertex. (In the case of the opposite angle being obtuse, drawing a line at a negative angle means going outside the triangle.)
In coastal navigation, a triangle's circumcircle is sometimes used as a way of obtaining a position line using a sextant when no compass is available. The horizontal angle between two landmarks defines the circumcircle upon which the observer lies.
The circumcenter's position depends on the type of triangle:
- If and only if a triangle is acute (all angles smaller than a right angle), the circumcenter lies inside the triangle.
- If and only if it is obtuse (has one angle bigger than a right angle), the circumcenter lies outside the triangle.
- If and only if it is a right triangle, the circumcenter lies at the center of the hypotenuse. This is one form of Thales' theorem.
-
_Circumscribed.svg.png)
The circumcenter of an acute triangle is inside the triangle
-
_Circumscribed.svg.png)
The circumcenter of a right triangle is at the center of the hypotenuse
-
_Circumscribed.svg.png)
The circumcenter of an obtuse triangle is outside the triangle
The diameter of the circumcircle can be computed as the length of any side of the triangle, divided by the sine of the opposite angle. (As a consequence of the law of sines, it does not matter which side is taken: the result will be the same.) The triangle's nine-point circle has half the diameter of the circumcircle. The diameter of the circumcircle of the triangle ΔABC is

where a, b, c are the lengths of the sides of the triangle and s = (a + b + c)/2 is the semiperimeter. The expression  above is the area of the triangle, by Heron's formula. Trigometric expressions for the diameter of the circumcircle include[1]:p.379
above is the area of the triangle, by Heron's formula. Trigometric expressions for the diameter of the circumcircle include[1]:p.379

In any given triangle, the circumcenter is always collinear with the centroid and orthocenter. The line that passes through all of them is known as the Euler line.
The isogonal conjugate of the circumcenter is the orthocenter.
The useful minimum bounding circle of three points is defined either by the circumcircle (where three points are on the minimum bounding circle) or by the two points of the longest side of the triangle (where the two points define a diameter of the circle). It is common to confuse the minimum bounding circle with the circumcircle.
The circumcircle of three collinear points is the line on which the three points lie, often referred to as a circle of infinite radius. Nearly collinear points often lead to numerical instability in computation of the circumcircle.
Circumcircles of triangles have an intimate relationship with the Delaunay triangulation of a set of points.
Circumcircle equations
In the Euclidean plane, it is possible to give explicitly an equation of the circumcircle in terms of the Cartesian coordinates of the vertices of the inscribed triangle. Thus suppose that


are the coordinates of points A, B, and C. The circumcircle is then the locus of points v = (vx,vy) in the Cartesian plane satisfying the equations

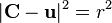
guaranteeing that the points A, B, C, and v are all the same distance r from the common center u of the circle. Using the polarization identity, these equations reduce to the condition that the matrix
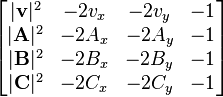
has a nonzero kernel. Thus the circumcircle may alternatively be described as the locus of zeros of the determinant of this matrix:
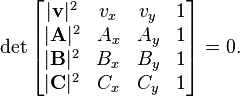
Expanding by cofactor expansion, let


we then have a|v|2 − 2Sv − b = 0 and, assuming the three points were not in a line (otherwise the circumcircle is that line that can also be seen as a generalized circle with S at infinity), |v − S/a|2 = b/a + |S|2/a2, giving the circumcenter S/a and the circumradius √(b/a + |S|2/a2). A similar approach allows one to deduce the equation of the circumsphere of a tetrahedron.
An equation for the circumcircle in trilinear coordinates x : y : z is a/x + b/y + c/z = 0. An equation for the circumcircle in barycentric coordinates x : y : z is a2/x + b2/y + c2/z = 0.
The isogonal conjugate of the circumcircle is the line at infinity, given in trilinear coordinates by ax + by + cz = 0 and in barycentric coordinates by x + y + z = 0.
Additionally, the circumcircle of a triangle embedded in d dimensions can be found using a generalized method. Let A, B, and C be d-dimensional points, which form the vertices of a triangle. We start by transposing the system to place C at the origin:


The circumradius, r, is then

where θ is the interior angle between a and b. The circumcenter, p0, is given by

This formula only works in three dimensions as the cross product is not defined in other dimensions, but it can be generalized to the other dimensions by replacing the cross products with following identities:



Circumcenter coordinates
Cartesian coordinates
The Cartesian coordinates of the circumcenter are


with

Without loss of generality this can be expressed in a simplified form after translation of the vertex A to the origin of the Cartesian coordinate systems, i.e., when A′ = A − A = (A′x,A′y) = (0,0). In this case, the coordinates of the vertices B′ = B − A and C′ = C − A represent the vectors from vertex A′ to these vertices. Observe that this trivial translation is possible for all triangles and the circumcenter coordinates of the triangle A′B′C′ follow as


with

Barycentric coordinates as a function of the side lengths
The circumcenter has trilinear coordinates (cos α, cos β, cos γ) where α, β, γ are the angles of the triangle. The circumcenter has barycentric coordinates

where a, b, c are edge lengths (BC, CA, AB respectively) of the triangle.
Barycentric coordinates from cross- and dot-products
In Euclidean space, there is a unique circle passing through any given three non-collinear points P1, P2, and P3. Using Cartesian coordinates to represent these points as spatial vectors, it is possible to use the dot product and cross product to calculate the radius and center of the circle. Let

Then the radius of the circle is given by

The center of the circle is given by the linear combination

where



Parametric equation of a triangle's circumcircle
A unit vector perpendicular to the plane containing the circle is given by

Hence, given the radius, r, center, Pc, a point on the circle, P0 and a unit normal of the plane containing the circle,  , one parametric equation of the circle starting from the point P0 and proceeding in a positively oriented (i.e., right-handed) sense about is the following:
, one parametric equation of the circle starting from the point P0 and proceeding in a positively oriented (i.e., right-handed) sense about is the following:
![{\mathrm {R}}\left(s\right)={\mathrm {P_{c}}}+\cos \left({\frac {{\mathrm {s}}}{{\mathrm {r}}}}\right)\left(P_{0}-P_{c}\right)+\sin \left({\frac {{\mathrm {s}}}{{\mathrm {r}}}}\right)\left[{\hat {n}}\times \left(P_{0}-P_{c}\right)\right].](/2014-wikipedia_en_all_02_2014/I/media/b/b/3/5/bb35a673e4b4bb944f7f97159a241fdb.png)
Angles
 |
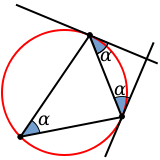 |
The angles which the circumscribed circle forms with the sides of the triangle coincide with angles at which sides meet each other. The side opposite angle α meets the circle twice: once at each end; in each case at angle α (similarly for the other two angles). The alternate segment theorem states that the angle between the tangent and chord equals the angle in the alternate segment.
Triangle centers on the circumcircle of triangle ABC
In this section, the vertex angles are labeled A, B, C and all coordinates are trilinear coordinates:
- Steiner point = bc / (b2 − c2) : ca / (c2 − a2) : ab / (a2 − b2) = the nonvertex point of intersection of the circumcircle with the Steiner ellipse. (The Steiner ellipse, with center = centroid(ABC), is the ellipse of least area that passes through A, B, and C. An equation for this ellipse is 1/(ax) + 1/(by) + 1/(cz) = 0.)
- Tarry point = sec (A + ω) : sec (B + ω) : sec (C + ω) = antipode of the Steiner point
- Focus of the Kiepert parabola = csc (B − C) : csc (C − A) : csc (A − B).
Other properties
The circumcircle radius is no smaller than twice the incircle radius (Euler's triangle inequality).[3]
The distance between the circumcenter and the incenter is  where r is the incircle radius and R is the circumcircle radius.[3]
where r is the incircle radius and R is the circumcircle radius.[3]
The product of the incircle radius and the circumcircle radius of a triangle with sides a, b, and c is[4] 
Cyclic quadrilaterals

Quadrilaterals that can be circumscribed have particular properties including the fact that opposite angles are supplementary angles (adding up to 180° or π radians).
Cyclic n-gons
For a cyclic polygon with an odd number of sides, all angles are equal if and only if the polygon is regular. A cyclic polygon with an even number of sides has all angles equal if and only if the alternate sides are equal (that is, sides 1, 3, 5, ... are equal, and sides 2, 4, 6, ... are equal).[5]
A cyclic pentagon with rational sides and area is known as a Robbins pentagon; in all known cases, its diagonals also have rational lengths.[6]
In any cyclic n-gon with even n, the sum of one set of alternate angles (the first, third, fifth, etc.) equals the sum of the other set of alternate angles. This can be proven by induction from the n=4 case, in each case replacing a side with three more sides and noting that these three new sides together with the old side form a quadrilateral which itself has this property; the alternate angles of the latter quadrilateral represent the additions to the alternate angle sums of the previous n-gon.
See also
- Inscribed circle
- Jung's theorem, an inequality relating the diameter of a point set to the radius of its minimum bounding circle
- Lester's theorem
- Circumscribed sphere
- Triangle center
- Japanese theorem for cyclic quadrilaterals
- Japanese theorem for cyclic polygons
Notes
- ↑ This can be proven on the grounds that the general equation for a circle with center (a, b) and radius r in the Cartesian coordinate system is

References
- ↑ Dörrie, Heinrich, 100 Great Problems of Elementary Mathematics, Dover, 1965.
- ↑ Wolfram page on barycentric coordinates
- ↑ 3.0 3.1 Nelson, Roger, "Euler's triangle inequality via proof without words," Mathematics Magazine 81(1), February 2008, 58-61.
- ↑ Johnson, Roger A., Advanced Euclidean Geometry, Dover, 2007 (orig. 1929), p. 189, #298(d).
- ↑ De Villiers, Michael. "Equiangular cyclic and equilateral circumscribed polygons," Mathematical Gazette 95, March 2011, 102-107.
- ↑ Buchholz, Ralph H.; MacDougall, James A. (2008), "Cyclic polygons with rational sides and area", Journal of Number Theory 128 (1): 17–48, doi:10.1016/j.jnt.2007.05.005, MR 2382768.
- ^ Coxeter, H.S.M. (1969). "Chapter 1". Introduction to geometry. Wiley. pp. 12–13. ISBN 0-471-50458-0.
- ^ Megiddo, N. (1983). "Linear-time algorithms for linear programming in R3 and related problems". SIAM Journal on Computing 12 (4): 759–776. doi:10.1137/0212052.
- Kimberling, Clark (1998). "Triangle centers and central triangles". Congressus Numerantium 129: i–xxv, 1–295.
- ^ Pedoe, Dan (1988). Geometry: a comprehensive course. Dover.
External links
- Derivation of formula for radius of circumcircle of triangle at Mathalino.com
- Semi-regular angle-gons and side-gons: respective generalizations of rectangles and rhombi at Dynamic Geometry Sketches, interactive dynamic geometry sketch.
MathWorld
- Weisstein, Eric W., "Circumcircle", MathWorld.
- Weisstein, Eric W., "Cyclic Polygon", MathWorld.
- Weisstein, Eric W., "Steiner circumellipse", MathWorld.
Interactive
- Triangle circumcircle and circumcenter With interactive animation
- An interactive Java applet for the circumcenter