Brake-by-wire
Brake-by-wire technology in automotive industry is the ability to control brakes through electrical means. It can be designed to supplement ordinary service brakes or it can be a standalone brake system.
Introduction
Brake-by-wire technology in automotive industry represents the replacement of traditional components such as the pumps, hoses, fluids, belts and vacuum servos and master cylinders with electronic sensors and actuators. Drive-by-wire technology in automotive industry replaces the traditional mechanical and hydraulic control systems with electronic control systems using electromechanical actuators and human-machine interfaces such as pedal and steering feel emulators.
Some x-by-wire technologies have been already installed on commercial vehicles such as steer-by-wire, and throttle-by-wire. Brake-by-wire technology is still under development by some automobile and automotive parts manufacturers industry worldwide and has not been widely commercialized yet. This is mainly due to the safety-critical nature of brake products. So far, Mercedes-Benz (Sensotronic) and Toyota (Electronically Controlled Brake) already use almost fully brake-by-wire systems, on the Mercedes-Benz E-class and SL models and on Toyota's Estima.
EBS
Brake-by-wire exists on heavy duty commercial vehicles under the name Electronic Braking System (EBS). This system provides electronic activation of all braking system components including retarder and engine brake. EBS also supports trailers and communicates between the towing vehicle and trailer using the ISO 11992 protocol. The communication between trailer and towing vehicle shall be done through a specific connector dedicated to ABS/EBS following either ISO 7638-1 for 24V systems or ISO 7638-2 for 12V systems.
Manufacturers of Electronic Braking Systems:
EBS still relies on compressed air for braking and is only controlling the air through valves which means that it is not depending on higher voltages used by the electromechanical or electrohydraulical brake systems where electric power also is used to apply the brake pressure.
EBS enhances the precision of the braking over conventional braking, which shortens the braking distance. This essentially means that what EBS provides is icing on the cake of an already powerful brake system. The fall back of an EBS system in case of failure is to use the ordinary air brake control pressure, so even in the event of a failure of the electronics the vehicle shall be able to make a safe stop.
Architecture of an Electromechanical Braking System
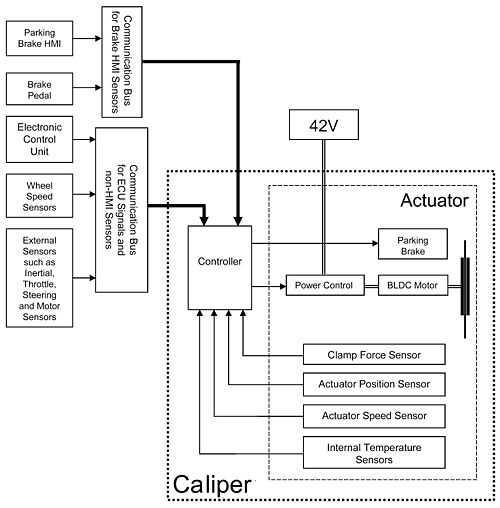
General architecture of an electromechanical braking (EMB) system in a drive-by-wire car is shown in Fig. 1. The system mainly comprises five types of elements:
- Processors including an Electronic Control Unit (ECU) and other local processors
- Memory (mainly integrated into the ECU)
- Sensors
- Actuators
- Communication network(s).
Once the driver inputs a brake command to the system via a human-machine interface - HMI (e.g. the brake pedal), four independent brake commands are generated by the ECU based on high level brake functions such as anti-lock braking system (ABS) or vehicle stability control (VSC). These command signals are sent to the four electric calipers (e-calipers) via a communication network. As this network might not be able to properly communicate with the e-calipers due to network faults, HMI sensory data are also directly transmitted to each e-caliper via a separate data bus.
In each e-caliper a controller uses the brake command (received from ECU) as a reference input. The controller provides drive control commands for a power control module. This module controls three phase drive currents for the brake actuator which is a permanent magnet DC motor, energised by 42V sources. In addition to tracking its reference brake command, the caliper controller also controls the position and speed of the brake actuator. Thus, two sensors are vitally required to measure the position and speed of the actuator in each e-caliper. Because of the safety critical nature of the application, even missing a limited number of samples of these sensory data should be compensated for.
Voting
A brake-by-wire system, by nature, is a safety critical system and therefore fault tolerance is a vitally important characteristic of this system. As a result, a brake-by-wire system is designed in such way that many of its essential information would be derived from a variety of sources (sensors) and be handled by more than the bare necessity hardware. Three main types of redundancy usually exist in a brake-by-wire system:
- Redundant sensors in safety critical components such as the brake pedal.
- Redundant copies of some signals that are of particular safety importance such as displacement and force measurements of the brake pedal copied by multiple processors in the pedal interface unit.
- Redundant hardware to perform important processing tasks such as multiple processors for the electronic control unit (ECU) in Fig. 1.
In order to utilize the existing redundancy, voting algorithms need to be evaluated, modified and adopted to meet the stringent requirements of a brake-by-wire system. Reliability, fault tolerance and accuracy are the main targeted outcomes of the voting techniques that should be developed especially for redundancy resolution inside a brake-by-wire system.
Example of a solution for this problem: A fuzzy voter developed to fuse the information provided by three sensors devised in a brake pedal design.
Missing data compensation
In a by-wire car, some sensors are safety-critical components, and their failure will disrupt the vehicle function and endanger human lives. Two examples are the brake pedal sensors and the wheel speed sensors. The electronic control unit must always be informed of the driver’s intentions to brake or to stop the vehicle. Therefore, missing the pedal sensor data is a serious problem for functionality of the vehicle control system. Wheel speed data are also vital in a brake-by-wire system to avoid skidding. The design of a by-wire car should provide safeguards against missing some of the data samples provided by the safety-critical sensors. Popular solutions are to provide redundant sensors and to apply a fail-safe mechanism. In addition to a complete sensor loss, the electronic control unit may also suffer an intermittent (temporary) data loss. For example, sensor data can sometimes fail to reach the electronic control unit. This may happen due to a temporary problem with the sensor itself or with the data transmission path. It may also result from an instantaneous short circuit or disconnection, a communication network fault, or a sudden increase in noise. In such cases, for a safe operation, the system has to be compensated for missing data samples.
Example of a solution for this problem: Missing data compensation by a predictive filter.
Accurate estimation of position and speed of brake actuators in the e-calipers
The caliper controller controls the position and speed of the brake actuator (besides its main task which is tracking of its reference brake command). Thus, position and speed sensors are vitally required in each e-caliper and an efficient design of a measurement mechanism to sense the position and speed of the actuator is required. Recent designs for brake-by-wire systems use resolvers to provide accurate and continuous measurements for both absolute position and speed of the rotor of the actuators. Incremental encoders are relative position sensors and their additive error needs to be calibrated or compensated for by different methods. Unlike the encoders, resolvers provide two output signals that always allow the detection of absolute angular position. In addition, they suppress common mode noise and are especially useful in a noisy environment. Because of these reasons, resolvers are usually applied for the purpose of position and speed measurement in brake-by-wire systems. However, nonlinear and robust observers are required to extract accurate position and speed estimates from the sinusoidal signals provided by resolvers.
Example of a solution for this problem: A hybrid resolver-to-digital conversion scheme with guaranteed robust stability and automatic calibration of the resolvers used in an EMB system.
Measurement and/or estimation of clamp force in the electromechanical calipers
A clamp force sensor is a relatively expensive component in an EMB caliper. The cost is derived from its high unit value from a supplier, as well as marked production expenses because of its inclusion. The later emanates from the complex assembly procedures dealing with small tolerances, as well as on-line calibration for performance variability from one clamp force sensor to another. The successful use of a clamp force sensor in an EMB system poses a challenging engineering task. If a clamp force sensor is placed close to a brake pad, then it will be subjected to severe temperature conditions reaching up to 800 Celsius that will challenge its mechanical integrity. Also temperature drifts must be compensated for. This situation can be avoided by embedding a clamp force sensor deep within the caliper. However, embedding this sensor leads to hysteresis that is influenced by friction between the clamp force sensor and the point of contact of an inner pad with the rotor. This hysteresis prevents a true clamp force to be measured. Due to the cost issues and engineering challenges involved with including the clamp force sensor, it might be desirable to eliminate this component from the EMB system. A potential opportunity to achieve this presents itself in accurate estimation of the clamp force based on alternative EMB system sensory measurements leading to the omission of a clamp force sensor.
Example of a solution for this problem: Clamp force estimation from actuator position and current measurements using sensor data fusion.
See also
- Drive-by-wire
- Fly-by-wire
References
Further reading
- Hoseinnezhad, R., Bab-Hadiashar, A., Missing data compensation for safety-critical components in a drive-by wire system (2005), IEEE Transactions on Vehicular Technology, Volume 54, Issue 4, pp. 1304–1311.
- Hoseinnezhad, R., Signal Processing Methods and Apparatus (Missing Data Handling by A Multi-Step Ahead Predictive Filter), International Patent number PCT/AU2005/000888.
- Hoseinnezhad, R., Bab-Hadiashar, A., Fusion of redundant information in brake-by-wire systems, using a fuzzy Voter (2006), Journal of Advances in Information Fusion (JAIF), Volume 1, Issue 1, pp. 35–45.
- Hoseinnezhad, R., Position sensing in by-wire brake callipers using resolvers (2006), IEEE Transactions on Vehicular Technology, Volume 55, Issue 3, pp. 924–932.
- Hoseinnezhad, R., Harding, P., Signal Processing and Position Determining Apparatus and Methods, International patent application number PCT/AU2006/000282.
- Hoseinnezhad, R., Bab-Hadiashar, A., Automatic calibration of resolver sensors in electro-mechanical braking systems: A modified recursive weighted least squares approach (2007), IEEE Transactions on Industrial Electronics, Volume 54, Issue 2, pp. 1052–1060.
- Anwar, S., Zheng, B., An antilock-braking algorithm for an eddy-current-based brake-by-wire system (2007) IEEE Transactions on Vehicular Technology, 56 (3), pp. 1100–1107.
- Anwar, S., Anti-lock braking control of a hybrid brake-by-wire system (2006) Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 220 (8), pp. 1101–1117.
- Lee, Y., Lee, W.S., Hardware-in-the-loop simulation for electro-mechanical brake (2006) 2006 SICE-ICASE International Joint Conference, art. no. 4109220, pp. 1513–1516.
- Canuto, F., Turco, P., Colombo, D., Control development process of the brake-by-wire system (2006) Proceedings of 8th Biennial ASME Conference on Engineering Systems Design and Analysis, ESDA2006, 2006,
- Lang, H., Roberts, R., Jung, A., Fiedler, J., Mayer, A., The road to 12V brake-by-wire technology (2006) VDI Berichte, (1931), pp. 55–71.
- Emereole, O.C., Good, M.C., Comparison of the braking performance of electromechanical and hydraulic abs systems (2005) American Society of Mechanical Engineers, Dynamic Systems and Control Division (Publication) DSC, 74 DSC (1 PART A), pp. 319–328.
- Murphey, Y.L., Masrur, A., Chen, Z., Zhang, B., A fuzzy system for fault diagnostics in power electronics based brake-by-wire system (2005) Annual Conference of the North American Fuzzy Information Processing Society - NAFIPS, 2005, art. no. 1548556, pp. 326–331.
- Masrur, A., Zhang, B., Wu, H., Mi, C., Chen, Z., Murphey, Y.L., Fault diagnostics in power electronics based brake-by-wire system (2005) 2005 IEEE Vehicle Power and Propulsion Conference, VPPC, 2005, art. no. 1554615, pp. 560–566.
- Anwar, S., A torque based sliding mode control of an eddy current braking system for automotive applications (2005) American Society of Mechanical Engineers, Dynamic Systems and Control Division (Publication) DSC, 74 DSC (1 PART A), pp. 297–302.
- Anwar, S., Anti-lock braking control of an electromagnetic brake-by-wire system (2005) American Society of Mechanical Engineers, Dynamic Systems and Control Division (Publication) DSC, 74 DSC (1 PART A), pp. 303–311.