Bending moment

A bending moment is a measure of the average internal stress induced in a structural element when an external force or moment is applied to the element causing the element to bend.[1][2]
The internal stresses in a cross-section of a structural element can be resolved into a resultant force and a resultant couple. For equilibrium, the moment created by external forces (and external moments) must be balanced by the couple induced by the internal stresses. The resultant internal couple is called the bending moment while the resultant internal force is called the shear force (if it is transverse to the plane of element) or the normal force (if it is along the plane of the element).
The bending moment at a section through a structural element may be defined as "the sum of the moments about that section of all external forces acting to one side of that section". The forces and moments on either side of the section must be equal in order to counteract each other and maintain a state of equilibrium so the same bending moment will result from summing the moments, regardless of which side of the section is selected. If clockwise bending moments are taken as negative, then a negative bending moment within an element will cause "sagging", and a positive moment will cause "hogging". It is therefore clear that a point of zero bending moment within a beam is a point of contraflexure—that is the point of transition from hogging to sagging or vice versa.
Moments and torques are measured as a force multiplied by a distance so they have as unit newton-metres (N·m), or pound-foot or foot-pound (ft·lb). The concept of bending moment is very important in engineering (particularly in civil and mechanical engineering) and physics.
Background
Tensile and compressive stresses increase proportionally with bending moment, but are also dependent on the second moment of area of the cross-section of the structural element. Failure in bending will occur when the bending moment is sufficient to induce tensile stresses greater than the yield stress of the material throughout the entire cross-section. It is possible that failure of a structural element in shear may occur before failure in bending, however the mechanics of failure in shear and in bending are different.
Moments are calculated by multiplying the external vector forces (loads or reactions) by the vector distance at which they are applied. When analysing an entire element, it is sensible to calculate moments at both ends of the element, at the beginning, centre and end of any uniformly distributed loads, and directly underneath any point loads. Of course any "pin-joints" within a structure allow free rotation, and so zero moment occurs at these points as there is no way of transmitting turning forces from one side to the other.
It is more common to use the convention that a clockwise bending moment to the left of the point under consideration is taken as positive. This then corresponds to the second derivative of a function which, when positive, indicates a curvature that is 'lower at the centre' i.e. sagging. When defining moments and curvatures in this way calculus can be more readily used to find slopes and deflections.
Critical values within the beam are most commonly annotated using a bending moment diagram, where negative moments are plotted to scale above a horizontal line and positive below. Bending moment varies linearly over unloaded sections, and parabolically over uniformly loaded sections.
Engineering descriptions of the computation of bending moments can be confusing because of unexplained sign conventions and implicit assumptions. The descriptions below use vector mechanics to compute of moments of force and bending moments in an attempt to explain, from first principles, why particular sign conventions are chosen.
Computing the moment of force
An important part of determining bending moments in practical problems is the computation of moments of force.
Let  be a force vector acting at a point A in a body. The moment of this force about a reference point (O) is defined as[2]
be a force vector acting at a point A in a body. The moment of this force about a reference point (O) is defined as[2]

where  is the moment vector and
is the moment vector and  is the position vector from the reference point (O) to the point of application of the force (A). The
is the position vector from the reference point (O) to the point of application of the force (A). The  symbol indicates the vector cross product. For many problems, it is more convenient to compute the moment of force about an axis that passes through the reference point O. If the unit vector along the axis is
symbol indicates the vector cross product. For many problems, it is more convenient to compute the moment of force about an axis that passes through the reference point O. If the unit vector along the axis is  , the moment of force about the axis is defined as
, the moment of force about the axis is defined as

where  indicates the vector dot product.
indicates the vector dot product.
example
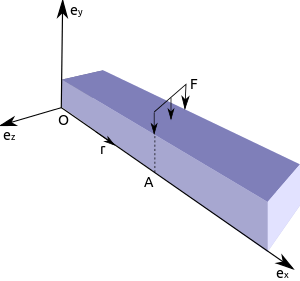
The adjacent figure shows a beam that is acted upon by a force  . If the coordinate system is defined by the three unit vectors
. If the coordinate system is defined by the three unit vectors  , we have the following
, we have the following

Therefore,
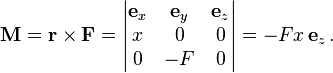
The moment about the axis  is then
is then

Sign conventions
The negative value suggests that a moment that tends to rotate a body clockwise around an axis should have a negative sign. However, the actual sign depends on the choice of the three axes . For instance, if we choose another right handed coordinate system with  , we have
, we have

Then,

For this new choice of axes, a positive moment tends to rotate body clockwise around an axis.
Computing the bending moment
In a rigid body or in an unconstrained deformable body, the application of a moment of force causes a pure rotation. But if a deformable body is constrained, it develops internal forces in response to the external force so that equilibrium is maintained. An example is shown in the figure below. These internal forces will cause local deformations in the body.
For equilibrium, the sum of the internal force vectors is equal to the applied external force and the sum of the moment vectors created by the internal forces is equal to the moment of the external force. The internal force and moment vectors are oriented in such a way that the total force (internal + external) and moment (external + internal) of the system is zero. The internal moment vector is called the bending moment.[1]
Though bending moments have been used to determine the stress states in arbitrary shaped structures, the physical interpretation of the computed stresses is problematic. However, physical interpretations of bending moments in beams and plates have a straightforward interpretation as the stress resultants in a cross-section of the structural element. For example, in a beam in the figure, the bending moment vector due to stresses in the cross-section A perpendicular to the x-axis is given by

Expanding this expression we have,

We define the bending moment components as
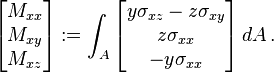
The internal moments are computed about an origin that is at the neutral axis of the beam or plate and the integration is through the thickness ( )
)
Example

In the beam shown in the adjacent figure, the external forces are the applied force at point A ( ) and the reactions at the two support points O and B (
) and the reactions at the two support points O and B ( and
and  ). The reactions can be computed using balances of forces and moments about point A, i.e.,
). The reactions can be computed using balances of forces and moments about point A, i.e.,

If  is the length of the beam, we have
is the length of the beam, we have

If we solve for the reactions we have

Looking at the free body diagram of the part of the beam to the left of point X, the total moment of the external forces about the point X is
![{\mathbf {M}}=-({\mathbf {r}}_{X}-{\mathbf {r}}_{A})\times {\mathbf {F}}-{\mathbf {r}}_{X}\times {\mathbf {R}}_{O}=\left[(x_{A}-x){\mathbf {e}}_{x}\right]\times \left(-F{\mathbf {e}}_{y}\right)-\left(x{\mathbf {e}}_{x}\right)\times \left(R_{O}{\mathbf {e}}_{y}\right)\,.](/2014-wikipedia_en_all_02_2014/I/media/8/7/9/8/87986c1477c915633d3840feab77c0c2.png)
If we compute the cross products, we have

For this situation, the only non-zero component of the bending moment is
![{\mathbf {M}}_{{xz}}=-\left[\int _{z}\int _{{-h/2}}^{{h/2}}y\,\sigma _{{xx}}\,dy\,dz\right]{\mathbf {e}}_{z}\,.](/2014-wikipedia_en_all_02_2014/I/media/6/a/c/7/6ac7fddd7a9383948b7b50df392f4fc4.png)
For the sum of the moments at X about the axis to be zero, we require

At  , we have
, we have  .
.
Sign convention
In the above discussion, it is implicitly assumed that the bending moment is positive when the top of the beam is compressed. That can be seen if we consider a linear distribution of stress in the beam and find the resulting bending moment. Let the top of the beam be in compression with a stress  and let the bottom of the beam have a stress
and let the bottom of the beam have a stress  . Then the stress distribution in the beam is
. Then the stress distribution in the beam is  . The bending moment due to these stresses is
. The bending moment due to these stresses is
![M_{{xz}}=-\left[\int _{z}\int _{{-h/2}}^{{h/2}}y\,(-y\sigma _{0})\,dy\,dz\right]=\sigma _{0}\,I](/2014-wikipedia_en_all_02_2014/I/media/6/6/5/0/665037e0e29ba04d1567c9c0150277f2.png)
where  is the area moment of inertia of the cross-section of the beam. Therefore the bending moment is positive when the top of the beam is in compression.
is the area moment of inertia of the cross-section of the beam. Therefore the bending moment is positive when the top of the beam is in compression.
Many authors follow a different convention in which the stress resultant  is defined as
is defined as
![{\mathbf {M}}_{{xz}}=\left[\int _{z}\int _{{-h/2}}^{{h/2}}y\,\sigma _{{xx}}\,dy\,dz\right]{\mathbf {e}}_{z}\,.](/2014-wikipedia_en_all_02_2014/I/media/b/2/3/b/b23bfeba9af2591349cc5e4896d098cb.png)
In that case, positive bending moments imply that the top of the beam is in tension. Of course, the definition of top depends on the coordinate system being used. In the examples above, the top is the location with the largest  -coordinate.
-coordinate.
See also
- Twisting moment
- Shear and moment diagrams
- Stress resultants
- First moment of area
- Influence line
- Second moment of area
- List of area moments of inertia
- Wing bending relief
References
External links
| Wikiversity has learning materials about Shear Force and Bending Moment Diagrams |