Divided differences
In mathematics divided differences is a recursive division process.
The method can be used to calculate the coefficients in the interpolation polynomial in the Newton form.
Contents |
Definition
Given n data points

The forward divided differences are defined as:
![[y_\nu]�:= y_\nu, \qquad \nu \in \{ 0,\ldots,n-1\}](/2012-wikipedia_en_all_nopic_01_2012/I/3dbce62ad5de9e3c7a46665a46dc54c2.png)
![[y_\nu,\ldots,y_{\nu%2Bj}]�:= \frac{[y_{\nu%2B1},\ldots , y_{\nu%2Bj}] - [y_{\nu},\ldots , y_{\nu%2Bj-1}]}{x_{\nu%2Bj}-x_\nu}, \qquad \nu\in\{0,\ldots,n-1-j\},\ j\in\{1,\ldots,n-1\}.](/2012-wikipedia_en_all_nopic_01_2012/I/2372383c3a914db02dbffc1e8f1268ab.png)
The backward divided differences are defined as:
![[y_\nu]�:= y_{\nu},\qquad \nu \in \{ 0,\ldots,n-1\}](/2012-wikipedia_en_all_nopic_01_2012/I/160127ad81c02736a6a4d8e5f5bb676b.png)
![[y_\nu,\ldots,y_{\nu-j}]�:= \frac{[y_\nu,\ldots , y_{\nu-j%2B1}] - [y_{\nu-1},\ldots , y_{\nu-j}]}{x_\nu - x_{\nu-j}}, \qquad \nu\in\{j,\ldots,n-1\},\ j\in\{1,\ldots,n-1\}.](/2012-wikipedia_en_all_nopic_01_2012/I/9c35d745e596e85854d366b1e43a935d.png)
Notation
If the data points are given as a function ƒ,

one sometimes writes
![f[x_\nu]�:= f(x_{\nu}), \qquad \nu \in \{ 0,\ldots,n-1 \}](/2012-wikipedia_en_all_nopic_01_2012/I/f5425c041d717bcce1c6f76f0883d73d.png)
![f[x_\nu,\ldots,x_{\nu%2Bj}]�:= \frac{f[x_{\nu%2B1},\ldots , x_{\nu%2Bj}] - f[x_\nu,\ldots , x_{\nu%2Bj-1}]}{x_{\nu%2Bj}-x_\nu}, \qquad \nu\in\{0,\ldots,n-1-j\},\ j\in\{1,\ldots,n-1\}.](/2012-wikipedia_en_all_nopic_01_2012/I/190adf2fb2d51e076228bc1126bcc2ad.png)
Several notations for the divided difference of the function ƒ on the nodes x0, ..., xn are used:
![[x_0,\ldots,x_n]f,](/2012-wikipedia_en_all_nopic_01_2012/I/8c4bd6a1648b8cc7d063aa085a5a5a94.png)
![[x_0,\ldots,x_n;f],](/2012-wikipedia_en_all_nopic_01_2012/I/c0df7f0122934a9a211df1ac47550715.png)
![D[x_0,\ldots,x_n]f](/2012-wikipedia_en_all_nopic_01_2012/I/3f6c93a5a5764581cfb9c5bdc93ce602.png)
etc.
Example
For the first few values of  , this yields
, this yields
![\begin{align}
\mathopen[y_0] &= y_0 \\
\mathopen[y_0,y_1] &= \frac{y_1-y_0}{x_1-x_0} \\
\mathopen[y_0,y_1,y_2]
&= \frac{\mathopen[y_1,y_2]-\mathopen[y_0,y_1]}{x_2-x_0}
= \frac{\frac{y_2-y_1}{x_2-x_1}-\frac{y_1-y_0}{x_1-x_0}}{x_2-x_0}
= \frac{y_2-y_1}{(x_2-x_1)(x_2-x_0)}-\frac{y_1-y_0}{(x_1-x_0)(x_2-x_0)}
\\
\mathopen[y_0,y_1,y_2,y_3] &= \frac{\mathopen[y_1,y_2,y_3]-\mathopen[y_0,y_1,y_2]}{x_3-x_0}
\end{align}](/2012-wikipedia_en_all_nopic_01_2012/I/3eec11ea1908571def182e230ae24053.png)
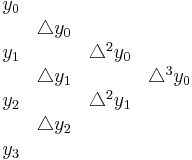
To make the recursive process more clear the divided differences can be put in a tabular form
![\begin{matrix}
x_0 & y_0 = [y_0] & & & \\
& & [y_0,y_1] & & \\
x_1 & y_1 = [y_1] & & [y_0,y_1,y_2] & \\
& & [y_1,y_2] & & [y_0,y_1,y_2,y_3]\\
x_2 & y_2 = [y_2] & & [y_1,y_2,y_3] & \\
& & [y_2,y_3] & & \\
x_3 & y_3 = [y_3] & & & \\
\end{matrix}](/2012-wikipedia_en_all_nopic_01_2012/I/36962f47338444c859795fffde59efb4.png)
Properties
![(f%2Bg)[x_0,\dots,x_n] = f[x_0,\dots,x_n] %2B g[x_0,\dots,x_n]](/2012-wikipedia_en_all_nopic_01_2012/I/f8e333c702683dd04016901d1a8adfe7.png)
![(\lambda\cdot f)[x_0,\dots,x_n] = \lambda\cdot f[x_0,\dots,x_n]](/2012-wikipedia_en_all_nopic_01_2012/I/b95cf03fb789e07a819ebb7cef542383.png)
![(f\cdot g)[x_0,\dots,x_n] = f[x_0]\cdot g[x_0,\dots,x_n] %2B f[x_0,x_1]\cdot g[x_1,\dots,x_n] %2B \dots %2B f[x_0,\dots,x_n]\cdot g[x_n]](/2012-wikipedia_en_all_nopic_01_2012/I/e261deefe5cebae2eb85e5e08ad142dd.png)
- From the mean value theorem for divided differences it follows that
![\lim_{(x_0,\dots,x_n)\to(\xi,\dots,\xi)} f[x_0,\dots,x_n] = \frac{f^{(n)}(\xi)}{n!}](/2012-wikipedia_en_all_nopic_01_2012/I/d3d3a24422b0857bfe9ad789395c80c4.png)
Matrix form
The divided difference scheme can be put into an upper triangular matrix. Let ![T_f(x_0,\dots,x_n)=
\begin{pmatrix}
f[x_0] & f[x_0,x_1] & f[x_0,x_1,x_2] & \ldots & f[x_0,\dots,x_n] \\
0 & f[x_1] & f[x_1,x_2] & \ldots & f[x_1,\dots,x_n] \\
\vdots & \ddots & \ddots & \ddots & \vdots \\
0 & \ldots & 0 & 0 & f[x_n]
\end{pmatrix}](/2012-wikipedia_en_all_nopic_01_2012/I/38fd8606a5fbbf95098e5aae6bcb659f.png) .
.
Then it holds


-
- This follows from the Leibniz rule. It means that multiplication of such matrices is commutative. Summarised, the matrices of divided difference schemes with respect to the same set of nodes form a commutative ring.
- Since
 is a triangular matrix, its eigenvalues are obviously
is a triangular matrix, its eigenvalues are obviously  .
. - Let
 be a Kronecker delta-like function, that is
be a Kronecker delta-like function, that is
-
- Obviously
 , thus is an eigenfunction of the pointwise function multiplication. That is
, thus is an eigenfunction of the pointwise function multiplication. That is  is somehow an "eigenmatrix" of :
is somehow an "eigenmatrix" of :  . However, all columns of are multiples of each other, the matrix rank of is 1. So you can compose the matrix of all eigenvectors from the
. However, all columns of are multiples of each other, the matrix rank of is 1. So you can compose the matrix of all eigenvectors from the  -th column of each . Denote the matrix of eigenvectors with
-th column of each . Denote the matrix of eigenvectors with  . Example
. Example
- The diagonalization of can be written as
 .
.

Alternative definitions
Expanded form
![\begin{align}
f[x_0] &= f(x_0) \\
f[x_0,x_1] &= \frac{f(x_0)}{(x_0-x_1)} %2B \frac{f(x_1)}{(x_1-x_0)} \\
f[x_0,x_1,x_2] &= \frac{f(x_0)}{(x_0-x_1)\cdot(x_0-x_2)} %2B \frac{f(x_1)}{(x_1-x_0)\cdot(x_1-x_2)} %2B \frac{f(x_2)}{(x_2-x_0)\cdot(x_2-x_1)} \\
f[x_0,x_1,x_2,x_3] &= \frac{f(x_0)}{(x_0-x_1)\cdot(x_0-x_2)\cdot(x_0-x_3)} %2B \frac{f(x_1)}{(x_1-x_0)\cdot(x_1-x_2)\cdot(x_1-x_3)} %2B \frac{f(x_2)}{(x_2-x_0)\cdot(x_2-x_1)\cdot(x_2-x_3)} %2B \frac{f(x_3)}{(x_3-x_0)\cdot(x_3-x_1)\cdot(x_3-x_2)} \\
f[x_0,\dots,x_n] &=
\sum_{j=0}^{n} \frac{f(x_j)}{\prod_{k\in\{0,\dots,n\}\setminus\{j\}} (x_j-x_k)}
\end{align}](/2012-wikipedia_en_all_nopic_01_2012/I/5d626a0b9304f3eaa65fbeb4e40fac25.png)
With help of a polynomial function  with
with  this can be written as
this can be written as
![f[x_0,\dots,x_n] = \sum_{j=0}^{n} \frac{f(x_j)}{q'(x_j)}.](/2012-wikipedia_en_all_nopic_01_2012/I/c4ccb6da4c0a713e7633694dcb167eea.png)
Partial fractions
You can represent partial fractions using the expanded form of divided differences. (This does not simplify computation, but is interesting in itself.) If  and are polynomial functions, where
and are polynomial functions, where  and is given in terms of linear factors by
and is given in terms of linear factors by  , then it follows from partial fraction decomposition that
, then it follows from partial fraction decomposition that
![\frac{p(\xi)}{q(\xi)} = \left(t\to\frac{p(t)}{\xi-t}\right)[x_1,\dots,x_n].](/2012-wikipedia_en_all_nopic_01_2012/I/f878ff178827499275d97725c8192c1d.png)
If limits of the divided differences are accepted, then this connection does also hold, if some of the  coincide.
coincide.
If  is a polynomial function with arbitrary degree and it is decomposed by
is a polynomial function with arbitrary degree and it is decomposed by  using polynomial division of by , then
using polynomial division of by , then
![\frac{p(\xi)}{q(\xi)} = \left(t\to\frac{f(t)}{\xi-t}\right)[x_1,\dots,x_n].](/2012-wikipedia_en_all_nopic_01_2012/I/6f3776aa6175e7be6aad90626755ba99.png)
Peano form
The divided differences can be expressed as
![f[x_0,\ldots,x_n] = \frac{1}{n!} \int_{x_0}^{x_n} f^{(n)}(t)B_{n-1}(t) \, dt](/2012-wikipedia_en_all_nopic_01_2012/I/d8d253d490142fed289507e92cbd1270.png)
where  is a B-spline of degree
is a B-spline of degree  for the data points
for the data points  and
and  is the
is the  -th derivative of the function .
-th derivative of the function .
This is called the Peano form of the divided differences and is called the Peano kernel for the divided differences, both named after Giuseppe Peano.
Taylor form
First order
If nodes are cumulated, then the numerical computation of the divided differences is inaccurate, because you divide almost two zeros, each of which with a high relative error due to differences of similar values. However we know, that difference quotients approximate the derivative and vice versa:
 for
for 
This approximation can be turned into an identity whenever Taylor's theorem applies.


You can eliminate the odd powers of  by expanding the Taylor series at the center between
by expanding the Taylor series at the center between  and
and  :
:
 , that is
, that is 



Higher order
The Taylor series or any other representation with function series can in principle be used to approximate divided differences. Taylor series are infinite sums of power functions. The mapping from a function to a divided difference ![f[x_0,\dots,x_n]](/2012-wikipedia_en_all_nopic_01_2012/I/d9b1e50e13928ce6837dd0ca5fe8e4f6.png) is a linear functional. We can as well apply this functional to the function summands.
is a linear functional. We can as well apply this functional to the function summands.
Express power notation with an ordinary function: 
Regular Taylor series is a weighted sum of power functions: 
Taylor series for divided differences: ![f[x_0,\dots,x_n] = f(0)\cdot p_0[x_0,\dots,x_n] %2B f'(0)\cdot p_1[x_0,\dots,x_n] %2B \frac{f''(0)}{2!}\cdot p_2[x_0,\dots,x_n] %2B \frac{f'''(0)}{3!}\cdot p_3[x_0,\dots,x_n] %2B \dots](/2012-wikipedia_en_all_nopic_01_2012/I/9b6f857d63fcde746302dabf058eeec1.png)
We know that the first terms vanish, because we have a higher difference order than polynomial order, and in the following term the divided difference is one:
![\begin{array}{llcl}
\forall j<n & p_j[x_0,\dots,x_n] &=& 0 \\
& p_n[x_0,\dots,x_n] &=& 1 \\
& p_{n%2B1}[x_0,\dots,x_n] &=& x_0 %2B \dots %2B x_n \\
& p_{n%2Bm}[x_0,\dots,x_n] &=& \sum_{a\in\{0,\dots,n\}^m \text{ with } a_1 \le a_2 \le \dots \le a_m} \prod_{j\in a} x_j. \\
\end{array}](/2012-wikipedia_en_all_nopic_01_2012/I/d68e0c219b4a45e54f4b9f12fda7d90f.png)
It follows that the Taylor series for the divided difference essentially starts with  which is also a simple approximation of the divided difference, according to the mean value theorem for divided differences.
which is also a simple approximation of the divided difference, according to the mean value theorem for divided differences.
If we would have to compute the divided differences for the power functions in the usual way, we would encounter the same numerical problems that we had when computing the divided difference of . The nice thing is, that there is a simpler way. It holds
![t^n = (1 - x_0\cdot t) \dots \cdot (1 - x_n\cdot t) \cdot
(p_0[x_0,\dots,x_n] %2B p_1[x_0,\dots,x_n]\cdot t %2B p_2[x_0,\dots,x_n]\cdot t^2 %2B \dots) .](/2012-wikipedia_en_all_nopic_01_2012/I/258de6e4f10ee5ec571bd3ec9cec2cb2.png)
Consequently we can compute the divided differences of  by a division of formal power series. See how this reduces to the successive computation of powers when we compute
by a division of formal power series. See how this reduces to the successive computation of powers when we compute ![p_n[h]](/2012-wikipedia_en_all_nopic_01_2012/I/2e52a123ccfc9baca16d952b42fdb53d.png) for several .
for several .
Cf. an implementation in Haskell.
If you need to compute a whole divided difference scheme with respect to a Taylor series, see the section about divided differences of power series.
Polynomials and power series
Divided differences of polynomials are particularly interesting, because they can benefit from the Leibniz rule. The matrix  with
with
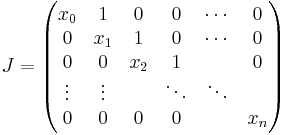
contains the divided difference scheme for the identity function with respect to the nodes , thus  contains the divided differences for the power function with exponent . Consequently you can obtain the divided differences for a polynomial function
contains the divided differences for the power function with exponent . Consequently you can obtain the divided differences for a polynomial function  with respect to the polynomial by applying (more precisely: its corresponding matrix polynomial function
with respect to the polynomial by applying (more precisely: its corresponding matrix polynomial function  ) to the matrix .
) to the matrix .


![= \begin{pmatrix}
\varphi(p)[x_0] & \varphi(p)[x_0,x_1] & \varphi(p)[x_0,x_1,x_2] & \ldots & \varphi(p)[x_0,\dots,x_n] \\
0 & \varphi(p)[x_1] & \varphi(p)[x_1,x_2] & \ldots & \varphi(p)[x_1,\dots,x_n] \\
\vdots & \ddots & \ddots & \ddots & \vdots \\
0 & \ldots & 0 & 0 & \varphi(p)[x_n]
\end{pmatrix}](/2012-wikipedia_en_all_nopic_01_2012/I/d8c7623eeb48006fc638975b64a98263.png)
This is known as Opitz' formula. [1] [2]
Now consider increasing the degree of to infinity, i.e. turn the Taylor polynomial to a Taylor series. Let be a function which corresponds to a power series. You can compute a divided difference scheme by computing the according matrix series applied to . If the nodes are all equal, then is a Jordan block and computation boils down to generalizing a scalar function to a matrix function using Jordan decomposition.
Forward differences
When the data points are equidistantly distributed we get the special case called forward differences. They are easier to calculate than the more general divided differences.
Definition
Given n data points
with

the divided differences can be calculated via forward differences defined as

Example
Computer Program
Notes
- ^ de Boor, Carl, Divided Differences, Surv. Approx. Theory 1 (2005), 46--69
- ^ Opitz, G. Steigungsmatrizen, Z. Angew. Math. Mech. (1964), 44, T52-T54